Пособие Механизация строительства мостов. Учебное пособие
МЕХАНИЗАЦИЯ
СТРОИТЕЛЬСТВА МОСТОВ
Учебное пособие для студентов,
обучающихся по специальности
«Мосты и транспортные тоннели»
Издание второе,
переработанное и дополненное
Санкт-Петербург
Издательство ДНК
2005
В пособии рассмотрены классификация мостостроительных машин, принципы комплексной механизации строительства, методы определения производительности комплектов и комплексов машин, порядок проектирования механизации работ в ПОС и ППР на строительство мостов. Приведены сведения об устройстве, типах и параметрах специальных машин для производства земляных работ, машин и оборудования для сооружения свайных фундаментов, специализированных грузоподъемных машин, а также транспортных средств, подъемно-транспортного оборудования и ручных машин для выполнения мостостроительных работ. Даны примеры технологических расчетов.
Пособие предназначено студентам специальности 270201 «Мосты и транспортные тоннели» всех форм обучения, а также может быть полезно для инженерно-технического персонала производственных организации.
СОДЕРЖАНИЕ
|
ВВЕДЕНИЕ 1. КЛАССИФИКАЦИЯ МОСТОСТРОИТЕЛЬНЫХ МАШИН 2. ПОНЯТИЕ О КОМПЛЕКСНОЙ МЕХАНИЗАЦИИ. МЕТОДЫ ОПРЕДЕЛЕНИЯ ПРОИЗВОДИТЕЛЬНОСТИ КОМПЛЕКТОВ И КОМПЛЕКСОВ МАШИН 3. ПРОЕКТИРОВАНИЕ МЕХАНИЗАЦИИ РАБОТ В ПОС И ППР НА СТРОИТЕЛЬСТВО МОСТОВ 4. СПЕЦИАЛЬНЫЕ МАШИНЫ ДЛЯ ПРОИЗВОДСТВА ЗЕМЛЯНЫХ РАБОТ 5. МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ СООРУЖЕНИЯ СВАЙНЫХ ФУНДАМЕНТОВ 5.1. Установки для ударного погружения свай 5.2. Вибропогружатели 5.3. Агрегаты для возведения фундаментов из буронабивных свай 5.4. Вспомогательное оборудование 5.5. Машины для фундаментов на вечномерзлых грунтах 6. ГРУЗОПОДЪЕМНЫЕ МАШИНЫ 6.1. Типы грузоподъемных кранов 6.2. Стреловые самоходные краны общего назначения 6.3. Специализированные универсальные краны 6.4. Специальные краны и монтажные агрегаты 6.5. Плавучие краны 7. ТРАНСПОРТ НА СТРОИТЕЛЬСТВЕ МОСТОВ 8. ПОДЪЕМНО-ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ 8.1. Лебедки и такелажное оборудование 8.2. Строповочные устройства и траверсы 8.3. Домкраты 9. РУЧНОЙ МЕХАНИЗИРОВАННЫЙ ИНСТРУМЕНТ 10. ПЕРСПЕКТИВНЫЕ НАПРАВЛЕНИЯ РАЗВИТИЯ МОСТОСТРОИТЕЛЬНОЙ ТЕХНИКИ СПИСОК ЛИТЕРАТУРЫ Приложение ПЛАШКОУТЫ ДЛЯ УСТАНОВКИ СУХОПУТНОЙ ТЕХНИКИ И ТРАНСПОРТНЫЕ ПЛАШКОУТЫ
|
ВВЕДЕНИЕ
«Жизненный цикл» мостового сооружения состоит из трех последовательных стадий: проектирование → строительство → эксплуатация. В соответствии с этим происходит и разделение специалистов отрасли по аналогичным сферам деятельности.
В существующей системе подготовки инженеров-мостовиков принят подход, при котором все студенты должны изучить по единой программе дисциплины, относящиеся ко всем трем стадиям жизненного цикла моста. Тем самым реализуется идея всеобъемлющего, универсального образования «на всю жизнь». Такой подход определился технократическими взглядами, прагматическими целями и технологическими возможностями настоящего.
В современных условиях меняются требования к системе образования, цель которого - готовить специалиста, способного к выработке нестандартных решений и к адаптации в условиях быстро развивающейся техники и технологии. Следует надеяться, что в ближайшее время будут созданы условия для большей профессионализации образования, его диверсификации, реального обеспечения академических свобод учащихся. Это означает, что каждому студенту будет дано право самостоятельно выбирать программу обучения в соответствии с направлением его дальнейшей деятельности.
По окончании вуза значительная часть молодых специалистов отправляется в строительные организации. Отсюда возрастает значимость этого направления обучения, объем блока дисциплин строительства мостов. Обязательным для желающих посвятить себя производственной деятельности является достаточно глубокое изучение устройства, принципов действия, условий применения средств механизации строительства мостов.
В настоящее время в строительстве эксплуатируется свыше тысячи типоразмеров и марок машин. Часть из них (машины универсального назначения) используется и в мостостроении. В то же время особенности возводимых мостовых сооружений, необходимость работы на акваториях рек, специфика технологических процессов вызывают потребность в создании и применении специализированных машин.
Инженер-мостостроитель на производстве должен соблюдать правильные условия использования, эксплуатации и ремонта строительной техники. Но этого недостаточно: необходимо также, чтобы он принимал творческое участие в улучшении существующих машин и в создании новых типов машин, обеспечивая непрерывность технического прогресса своей отрасли.
Однако единственный учебник в этой области, изданный в 1968 г. [1] и переизданный в 1971 г. [2], содержит во многом устаревшие сведения, а учебники для промышленного и гражданского строительства [3] - [6] и др., в силу специфики отрасли, мало помогут будущему мостостроителю.
Предлагаемая вниманию читателя книга предназначена для студентов специальности «Мосты и транспортные тоннели» всех форм обучения при изучении специальных разделов курса мостов, выполнении курсовых и дипломных проектов. В ее основу положен конспект лекций, которые автор читал на кафедре «Мосты» Петербургского государственного университета путей сообщения (ПГУПС) на протяжении последних лет. Данное учебное пособие впервые было издано в ПГУПС в 2001 г., затем выпущено для Автодорожного института СПбГАСУ в 2004 г. Теперь оно переиздается с изменениями и дополнениями и может быть рекомендовано для студентов всех российских вузов и аналогичных учебных заведений ближнего зарубежья, ведущих обучение студентов мостовой специальности.
Изучение механизации строительства мостов является важной составной частью дисциплин «Технология строительства мостов» [7] и «Организация, планирование и управление в мосто- и тоннелестроении» [8]. Системы механизации студенты изучают, исходя из знаний основ физики, теоретической механики, сопротивления материалов, гидравлики, механизмов и деталей машин, строительных материалов, строительных работ и машин, электротехники, автоматики и автоматизации.
В пособии рассмотрены классификация мостостроительных машин, принципы комплексной механизации строительства, методы определения производительности комплектов и комплексов машин, порядок проектирования механизации работ в ПОС и ППР на строительство мостов. Приведены сведения об устройстве, типах и параметрах специальных машин для производства земляных работ, машин и оборудования для сооружения свайных фундаментов опор, специализированных грузоподъемных машин, транспортных средств, подъемно-транспортного оборудования и ручных машин для выполнения мостостроительных работ. Даны примеры технологических расчетов.
Здесь не рассматриваются общестроительные машины для земляных, бетонных, гидроизоляционных, отделочных работ. Сведения о них можно получить в учебниках, справочниках, руководствах [3] - [6], [9], [10]- [14] и др.
Современная техника развивается быстрыми темпами. Каждый год в мире появляются десятки новых образцов строительных машин. Поэтому автор отнюдь не стремился дать студенту новейшие сведения, понимая, что это едва ли приведет к успеху: машины быстро морально устаревают.
Задача данного учебного пособия заключается в другом - ознакомить с основными типами мостостроительной техники, ее эволюцией в последние десятилетия, дать современные примеры и наметить перспективы развития техники. Наряду с изучением отечественных образцов машин важным для будущего персонала строительства является ознакомление с лучшими зарубежными машинами, активно внедряемыми на российский рынок.
1. КЛАССИФИКАЦИЯ МОСТОСТРОИТЕЛЬНЫХ МАШИН
Строительными машинами называют все средства механизации ручного труда строителей, включая малое механическое оборудование и механизированный ручной инструмент. Широкое внедрение механизации позволяет существенно повысить производительность труда, ускорить строительство, снизить стоимость работ, улучшить качество продукции.
Классификация строительных машин - это система, основанная на распределении их по совокупности признаков сходства, различия, взаимосвязей. Она делится на различные классификационные подразделения (уровни): классы, подклассы, группы, подгруппы, виды, подвиды, индексы [12].
Разнообразные машины, которые используются на строительстве мостов, можно классифицировать по назначению следующим образом [15].
- для земляных работ;
- подъемно-транспортные;
- буровые;
- для свайных работ;
- для бетонных и железобетонных работ;
- для сварки металлоконструкций;
- для гидроизоляционных работ;
- отделочные;
- специальное оборудование;
- ручные машины (механизированный инструмент).
Эта классификация охватывает средства механизации мостостроения. В нее не включены машины для заводского производства мостовых конструкций [16], [17], а также специальные машины и оборудование, предназначенные для ремонта и разборки мостов.
Машины для земляных работ . К этому классу относятся землеройные (одноковшовые экскаваторы) и землеройно-транспортные машины (бульдозеры), а также средства гидромеханизации земляных работ (землесосные снаряды, эрлифты, гидроэлеваторы).
Подъемно-транспортные машины делятся на три подкласса: грузоподъемные машины; транспортирующие машины; машины для погрузочно-разгрузочных работ.
В грузоподъемные машины включают две основные группы: краны и подъемники. Затем мы рассмотрим подгруппы, а также разновидности машин данной подгруппы, их назначение или конструктивные признаки.
Краны делят на следующие подгруппы и виды: стреловые самоходные краны общего назначения (на автомобильном, пневмоколесном, гусеничном и железнодорожном ходу, на специальном шасси); башенные (приставные, самоподъемные и передвижные); козловые; портальные; жестконогие деррик-краны; краны плавучие (речные и морские портовые, специальные сборно-разборные, а также сухопутные, установленные на плавучих средствах); консольные; консольно-шлюзовые; кабельные краны; специальные монтажные агрегаты.
В группу подъемников включают две подгруппы и такие виды: грузовые (ленточные фермоподъемники, устройства для выборки прогибов, домкратные установки, лебедки и др.) и пассажирские (устройства для подъема людей - лифты).
К транспортирующим машинам относятся стационарные средства (горизонтальный и вертикальный трубопроводный транспорт), самоходные средства (автомобили, тракторы, тягачи, рельсовый транспорт, плавучие средства), средства горизонтального перемещения грузов (лебедки и домкраты).
К числу машин для погрузочно-разгрузочных работ относят канатно-ковшовые устройства, разгрузчики, погрузчики и т.п., применяемые на соответствующих работах (разгрузка и перегрузка грузов с различных видов транспорта на железнодорожных станциях, причалах и т.п.; переработка и загрузка заполнителей на бетонных заводах и др.).
Для буровых работ (для разбуривания скважин при устройстве буронабивных и буроопускных свай) в мостостроении используют полноповоротные самоходные машины, навесное оборудование на краны и экскаваторы или специальные агрегаты.
Машины для свайных работ подразделяют на четыре подкласса: ударного, вибрационного, вдавливающего, вращательного действия. Рабочий орган, выполняющий свайную работу, подвешивают на поддерживающий его механизм (копер, кран, экскаватор, копер-кран и др.).
К первому подклассу относятся механические, паровоздушные, гидро- и дизельные молоты.
В состав второго входят вибропогружатели и машины комбинированного действия (последние относят и к первому, и ко второму подклассу, например, вибромолоты).
Третий подкласс состоит из машин для статического вдавливания свай в грунт (при помощи гидравлических домкратов и др.).
Четвертый подкласс составляют средства погружения винтовых свай (механические и электромеханические кабестаны).
Машины для бетонных и железобетонных работ , используемые на стройках, делятся на арматурные станки, дозировочные, смесительные и бетоноукладочные машины.
Бетоно- и растворосмесители по принципу действия можно разделить на смесители гравитационные и принудительного действия, машины циклического и непрерывного действия. Смесители гравитационные делят на стационарные (оборудование бетонных заводов) и передвижные (автобетоносмесители). Смесители принудительного действия могут быть роторными и противоточными.
Бетоноукладочные машины подразделяются на бетоно- и растворонасосы (с механическим либо гидравлическим приводом); пневмонагнетатели; оборудование для уплотнения бетонной смеси (поверхностные и глубинные вибраторы); специальное оборудование для подводного бетонирования (с безвибрационной и вибрационной укладкой бетонной смеси).
Машины для сварки металлоконструкций в условиях строительства используют при арматурных работах и на монтаже стальных и сталежелезобетонных пролетных строений. Это сварочные трансформаторы, машины для автоматической и полуавтоматической сварки.
Класс машин для гидроизоляционных работ охватывает установки для приготовления смесей, автобитумовозы, автогудронаторы, машины для устройства гидроизоляции из рулонных материалов и другие.
Отделочные машины применяют в основном для оштукатуривания и окраски поверхностей мостовых конструкций. К этому классу относят штукатурные агрегаты, машины для приготовления малярных составов, окрасочные агрегаты, краскораспылители, компрессоры и другое оборудование.
Специальное оборудование применяется в отдельных технологических процессах. Из-за большого разнообразия видов его трудно классифицировать. К этому классу можно отнести: оборудование для водоотлива и водопонижения, для балластировки плавучих систем, домкраты для натяжения арматурных пучков «на бетон» и другие средства механизации.
Ручные машины представляют собой пневматический механизированный инструмент (отбойные молотки, сверлильные и шлифовальные машинки, пневмогайковерты) и электрифицированный инструмент (электрические сверлильные и электрошлифовальные машины, инструмент для обработки деталей деревянных конструкций и др.).
Существуют и другие классификации строительных машин по назначению. С одной из них можно ознакомиться в справочнике [12].
С точки зрения воздействия машины на предмет труда различают технологические, транспортные и транспортно-технологические машины.
По принципу действия обычно выделяют машины циклического (прерывного) и непрерывного действия. Машина циклического действия совершает определенную работу лишь за некоторый интервал времени - цикл. Машина непрерывного действия, как это следует из названия, производит продукцию потоком, непрерывно. Условия равенства и минимизации интервалов времени (циклов) для машин первого типа и условие непрерывности работы машин второго типа, естественно, соблюдаются лишь при непрерывной подаче предмета труда к рабочему органу машины с интенсивностью, не меньшей производительности машины.
Большинство машин рассмотренных выше классов относятся к первому типу. Однако цикличность работы машины может быть вызвана не только принципом ее действия, но и тем, что машина используется в цикличном технологическом процессе либо взаимосвязью процессов. Например, при укладке бетонной смеси краном в бункерах происходит ярко выраженный цикличный процесс. При бесперебойной подаче смеси бетононасосом машина циклического действия работает в непрерывном режиме, но при подвозе смеси отдельными порциями работа бетононасоса приобретает циклический характер.
Объемы земляных работ на строительстве мостов относительно небольшие (разработка грунта в котлованах опор, отсыпка временных земляных сооружений, планировка откосов конусов насыпей). Поэтому землеройные и землеройно-транспортные машины здесь не имеют широкого применения. Но в мостостроении используют специальные средства гидромеханизации для подводной разработки грунта, которым посвящен разд. 4.
В мостах распространены свайные фундаменты, поэтому значительное внимание уделено машинам, предназначенным для выполнения этого вида работ: сваебойным, вибрационным, буровым ( разд. 5).
Общестроительные краны достаточно описаны в литературе ( [10] - [14] и др.). В разд. 6 рассмотрены лишь основные виды и марки специализированных грузоподъемных машин, а в разд. 7 - специализированный транспорт для строительства мостов. Поскольку мостостроителям приходится использовать сухопутные машины (краны, копры), установленные на плавучие средства, в приложении изложены основные сведения об этих установках. Машины для погрузочно-разгрузочных работ, как правило, не влияют на производительность основных технологических процессов и поэтому здесь не рассматриваются. Сведения о машинах для сварки металлоконструкций можно получить в книге [17], а в разд. 8 и 9 приводятся данные о некотором мостостроительном оборудовании и ручных машинах.
В рамках курса не рассматриваются машины для гидроизоляционных, бетонных и железобетонных работ, отделочные машины. Это - область дисциплины «Строительные работы и машины».
Также опущены вопросы параметризации, индексации, типажей и стандартов строительных машин; за ними отсылаем читателя к справочнику [12] и другим изданиям.
2. ПОНЯТИЕ О КОМПЛЕКСНОЙ МЕХАНИЗАЦИИ. МЕТОДЫ ОПРЕДЕЛЕНИЯ ПРОИЗВОДИТЕЛЬНОСТИ КОМПЛЕКТОВ И КОМПЛЕКСОВ МАШИН
Прежде чем перейти к конкретным типам машин, рассмотрим общие положения, касающиеся систем механизации строительства мостов.
Механизация строительства предусматривает замену ручного труда машинами с целью освобождения человека от выполнения тяжелых, трудоемких ручных операций, повышения производительности труда и снижения стоимости строительства. Высшей ступенью механизации является автоматизация производственных процессов.
В зависимости от степени оснащения технологических процессов машинами различают частичную и комплексную их механизацию.
Частичная механизация охватывает отдельные технологические операции или виды работ при сохранении значительной доли ручного труда, особенно на вспомогательных работах. В мостостроении к числу таких, достаточно распространенных операций относятся: строповка и временное раскрепление конструкций, устройство подмостей и опалубки железобетонных конструкций, сборка болтовых соединений.
Комплексной механизацией называется такой способ производства работ, при котором все основные и вспомогательные процессы выполняются машинами, увязанными между собой по основным технологическим и техническим параметрам.
Основные процессы на строительстве - это переработка предмета труда - исходного сырья, материалов и полуфабрикатов, а также монтаж (возведение) элементов сооружения.
Вспомогательные процессы - это в основном транспортировка, погрузка и разгрузка материалов, изделии и конструкций, обеспечивающие бесперебойное выполнение основных процессов.
Комплексная механизация осуществляется при помощи комплектов машин, которые становятся основной структурной единицей системы механизации строительства моста [15].
В состав каждого комплекта входят ведущая машина (или машины), выполняющая основной процесс, и вспомогательные (комплектующие) машины, выполняющие вспомогательные процессы.
Первичным звеном в системе механизации является комплексная механизация отдельных технологических операций, осуществляемая операционными комплектами машин (ОКМ). Примеры этих комплектов: средства механизации приготовления бетонной смеси на бетонном заводе; машины по укладке, разравниванию и уплотнению бетонной смеси в опалубке конструкции.
Отдельные ОКМ объединяются в технологические комплекты машин (ТКМ). При формировании ТКМ необходимо обеспечить бесперебойную работу ведущей машины (машин) сырьем, материалами, блоками и конструкциями. В качестве комплектующих машин на строительстве мостов выступают главным образом транспортные средства: единицы железнодорожного, автомобильного, водного транспорта.
Поэтому из схем, представленных в [ 6, табл. 1.1], в нашем случае приемлемы лишь две: одна ведущая машина (ВМ) (рис. 1, а) или несколько ведущих машин ( n ВМ) (рис. 1, б) и несколько параллельно работающих вспомогательных машин ( m ВсМ). При этом один поток транспортных средств может обслуживаться одной или несколькими ведущими машинами. Примеры ТКМ: «бетонный завод - автобетоновозы - средства укладки смеси» или «кран - транспортные средства».
Возможна также особая, но в то же время весьма распространенная (например, при работе сваебойного агрегата, при вибропогружении свай оболочек) схема. Действуют две ведущие машины: кран и агрегат. Непосредственно с комплектующими машинами (транспортом) связан только кран, но агрегат, выполняющий технологический процесс, зависит от работы и крана, и транспорта (рис. 1, в).
Технологические комплекты машин, выполняющие работы по возведению отдельных частей сооружения, в свою очередь объединяются в комплекс машин (КМ) строительства объекта.
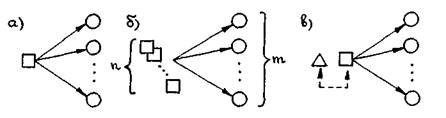
Рис. 1. Основные схемы технологических комплектов машин
□ ∆ - ведущие машины; ○ - вспомогательные машины; → - физическая связь; ← - → - технологическая связь
Формирование КМ происходит под действием системообразующих факторов (связей) следующих видов: 1) логических связей отдельных работ; 2) взаимосвязей по потреблению ресурсов типа «материалы»; 3) физических связей разных ТКМ, имеющих общие комплектующие машины; 4) технологических связей комплектов машин между собой; 5) функциональных взаимосвязей физически и технологически не связанных процессов, которые возникают при взаимодействии транспортных потоков в узлах транспортных схем на строительстве объекта.
Логическая связь работ еще не означает их технологическую зависимость. ТКМ, выполняющие те или иные работы, могут действовать независимо друг от друга. Но связь работ этого вида определяет потребность в данный период времени в ресурсе типа «мощности» вида «машины».
Примеры связей второго вида - потребление бетонной смеси с одного завода для разных процессов, потребление различных конструктивных блоков с одного склада разными объектами.
Физические связи ТКМ (в составе КМ) третьего вида имеют место, например, при монолитном бетонировании конструкций, где два отдельных комплекта машин - «бетонный завод - автобетоновозы» и «кран - автобетоновозы» - имеют общие комплектующие транспортные средства.
Технологические связи четвертого вида возникают между ведущими машинами комплектов, обслуживающих один технологический процесс. Это бывает при свайных работах, когда кран разгружает транспортные средства и подает под сваебойный агрегат или вибропогружатель сваи.
Пятый вид связей характерен именно для мостостроения, где, в силу необходимости проведения работ на акваториях, возникают многоступенчатые транспортные схемы. Например, при бетонировании опоры моста бетонную смесь вначале транспортируют автобетоновозами по суше, затем в бадьях доставляют на транспортных плашкоутах к опоре, где укладывают плавучим краном. Но если при этом одновременно сооружается несколько опор, грузопоток, проходя через единый транспортный узел - перегрузочный кран на причале - функционирование технологически не связанных процессов зависит от работы перегрузочного узла.
При подборе состава ТКМ работу ведущей машины (машин) и вспомогательных машин необходимо увязать по технологическим параметрам, в первую очередь по производительности. Во-вторых, состав комплекта должен быть экономически эффективен. Однако при наличии связей пятого типа правильный подбор состава отдельных ТКМ отнюдь не гарантирует достижение максимальной производительности комплекта. В комплексе взаимосвязанных ТКМ производительность отдельных машин может меняться в весьма широких пределах. Это обстоятельство и определяет основную сложность анализа и регулирования производительности системы механизации строительства моста (см. [15]).
Важнейшим показателем комплексной механизации строительства является производительность машин и комплектов машин, т.е. количество продукции, выраженное в определенных единицах измерения (весовых, объемных и др.), которые машина или комплект могут производить в единицу времени (час, смену).
Однако до сих пор объективность использования этого показателя довольно низка из-за того, что производительность машины - случайная величина, зависящая от ряда факторов:
- конструктивных качеств машины, параметры которых переменны. Один предмет труда машина может обрабатывать при различных скоростях движения рабочих органов, что в немалой степени зависит от квалификации субъекта - оператора машины;
- надежности машины как элемента технической системы, зависящей от режимов эксплуатации и обслуживания машины;
- конкретных производственных условий и организации труда, влияющих, прежде всего на движение рабочих органов и параметры обработки предмета труда, - при использовании ОКМ;
- операционных взаимосвязей в рамках одного технологического процесса - при формировании ТКМ;
- организационных условий строительства, представляющего собой сложную вероятностную систему, которая подвержена воздействию комплекса дестабилизирующих факторов, - при формировании КМ;
- неопределенности исходной информации и недостаточной информированности лица, принимающего решения, - при организационно-технологическом проектировании и управлении строительством.
Несмотря на эти факторы, придающие производительности машины существенную неопределенность, имеются относительно стабильные показатели работы машины - конструктивные свойства, которые можно принять за основу исследования.
Можно выделить следующие четыре категории производительности строительных машин.
Конструктивно-расчетная (номинальная) производительность Q м определяется при однозначно заданных параметрах ее работы в режимах, близких к предельным. Номинальная производительность характеризует конструктивные возможности машины и используется в основном для сравнения вариантов новых машин.
Техническая производительность Q т рассчитывается при непрерывной работе в конкретных производственных условиях, при хорошо организованном технологическом процессе, нормальных режимах и нагрузках на рабочие органы машины.
Эксплуатационная производительность Qэ - это фактическая производительность машины с учетом организационных условий работы (технологических перерывов, времени обслуживания и др.). Ее можно выразить через техническую производительность Q т посредством приближенной формулы
Q э = Q т K ип · K в (1)
где K т - коэффициент использования производительности машины; K в - коэффициент использования полного рабочего времени. Различают часовую Q э.ч и сменную эксплуатационную производительность Q э.см. Значение коэффициента К в для различных машин составляет 0,75-0,85.
В основу рассмотренных выше видов производительности положено представление об однозначной заданности основных параметров процессов и машин, т.е. Q м, Q т, Qэ есть детерминированные характеристики отдельных машин.
Прогнозируемая (вероятная) производительность комплекта (комплекса)
машин ![]() характеризует
реальные условия работы комплекта с учетом случайных процессов взаимосвязанного
функционирования машин в рамках организации строительства, а также процессов,
приводящих к выходу машин из строя, и процессов их восстановления. Данный вид
производительности - вероятностная величина, используемая в качестве проектного
параметра механизации. Она определяется в зависимости от эксплуатационной
производительности Q э по формуле
характеризует
реальные условия работы комплекта с учетом случайных процессов взаимосвязанного
функционирования машин в рамках организации строительства, а также процессов,
приводящих к выходу машин из строя, и процессов их восстановления. Данный вид
производительности - вероятностная величина, используемая в качестве проектного
параметра механизации. Она определяется в зависимости от эксплуатационной
производительности Q э по формуле
![]() (2)
(2)
где К п - коэффициент простоя машины, т.е. отношение суммарного
времени ее простоев к общему времени работы; К и -
коэффициент использования машины, К и = 1-К п; К г - коэффициент готовности, представляющий собой
характеристику безотказной работы машины. В расчетах обычно оперируют величиной
сменной производительности ![]() .
.
Для определения коэффициента К п используют методы теории массового обслуживания либо моделирование системы механизации на ЭВМ, а коэффициент K г определяют на основе теории надежности [6], [15].
При расчете
прогнозируемой производительности ![]() ТКМ или КМ прежде
всего необходимо знать техническую Q т и эксплуатационную Q э производительности отдельных машин комплектов.
Существуют следующие методы определения производительности строительных машин.
ТКМ или КМ прежде
всего необходимо знать техническую Q т и эксплуатационную Q э производительности отдельных машин комплектов.
Существуют следующие методы определения производительности строительных машин.
Нормативный метод - часовая производительность ведущей машины, непрерывно работающей в течение смены, задается в производственных нормах выработки машины (ЕНиР) как результат наблюдения за процессом. Метод прост, особенно при наличии компьютерной базы данных, содержащей ЕНиР. Но использование его на практике может давать весьма существенные погрешности, т.к. техническая производительность машин зависит от конкретных условий, которые сложно учесть в нормах.
Метод «де факто» - среднечасовая эксплуатационная производительность машин определяется по фактической выработке машин в предшествующий отчетный период по формуле
![]() (3)
(3)
где Vф - объем фактически выполненных работ за отчетный период; Тф - фактическое рабочее время одной среднесписочной машины, ч.
Оценка производительности по фактической выработке машин также сопряжена с рядом трудностей: при осреднении теряется специфика конкретных технологических условий, а отчетные данные по механизации, если и имеются в мостостроительных организациях, то чаще всего не позволяют сделать объективные выводы.
Аналитический (расчетный) метод состоит в определении значений технической производительности машин по формулам, в основу которых положены некоторые теоретические представления о физике процессов взаимодействия машин с предметами труда в заданных условиях.
Данный метод позволяет получать достоверные значения детерминированной производительности машины. Однако, чтобы пользоваться им, необходимо знать размеры и скорость движения рабочих органов машины (по справочным данным), а также условия их движения.
Энергетический метод основан на законе сохранения энергии и для конкретной машины и режимов ее работы сводится к составлению и интегрированию уравнения производственного процесса
 (4)
(4)
где ε = Wδ/Q0; W - сила сопротивления среды на длине пути δ; Q0 - производительность машины за производственный цикл t 0 ; k - коэффициент полезного действия; N - мощность источника энергии.
Энергетический метод - перспективное средство анализа производственных процессов. Этот метод объективен, но еще недостаточно разработан для практического определения производительности машин.
Расчет часовой технической производительности машин QT также может производиться по следующим аналитическим формулам:
- для машин циклического действия
Q т = 60G(V)/t ц , (5)
где Q т - техническая производительность в т/ч или м3/ч; G(V) - масса груза в т (G) или объем материала в м3 (V); t ц - время цикла, мин;
- для машин непрерывного действия
Q т = 3600G(V)v, (6)
где G(V) - масса груза в т (G) или объем материала в м3 (V), приходящийся на 1 м длины рабочего несущего органа машины; v - линейная скорость движения рабочего органа, м/с.
Общие формулы (5), (6) модифицируются с учетом принципа действия машин конкретного типа [10], [15].
Пример 1 . Рассчитаем аналитическим методом значение эксплуатационной сменной производительности стрелового гусеничного крана ДЭК-251, производящего укладку бетонной смеси в опалубку конструкции в бункерах вместимостью 3 м3.
Грузоподъемные краны - машины циклического действия, для которых время цикла в формуле (5) определяется следующим образом (см. [15] ):
t ц = 2,5H/v0 + 2(l1/v1 + l2/v2 + l3/v3) + tp.0,
где H , l 1 , l 2 , l 3 , - соответственно высота подъема крюка, длина передвижения крана, величина изменения вылета стрелы, угол поворота стрелы в плане; v0 , v1 , v2 , v3 - скорости подъема груза, передвижения крана, изменения вылета и поворота стрелы соответственно; t p . 0 - продолжительность ручных операций по строповке и закреплению груза.
В данном случае принимаем следующие технологические параметры работы крана: Н = 4 м; l 1 = 0 (кран работает стационарно); l 2 = 0 (кран работает на постоянном вылете); l 3 = 0,5 (кран совершает полоборота); tp . 0 = 2×2 = 4 мин.
Средние скорости движения vi , принимаем по справочнику [ 12, табл. 21.4, с. 422]: v0 = 5 м/с; v3 = 0,3 мин-1.
Тогда
t ц = 2,5×4/5+2×(0+0+0,5/0,3)+4 = 9,3 мин;
По формуле (5) определяем часовую техническую производительность крана:
Q т = 60×3,0/9,3 = 19,4 м3/ч.
Наконец, по формуле ( 1) при К ип = 1, К в = 0,85 и продолжительности смены tc = 8,2 ч определяем эксплуатационную сменную производительность крана по укладке бетонной смеси:
Q э.cм = 19,4×8,2×1,0×0,85 = 135 м3/см.
Приведенный пример показывает, что относительно несложный аналитический расчет позволяет в каждом конкретном случае оценивать реальную производительность машины, исходя из заданных параметров технологического процесса и скоростей движения основных рабочих органов машины. В этом несомненное преимущество метода по сравнению с использованием каких-то осредненных нормативов производительности (выработки) машин.
Производительность некоторых машин, которую сложно рассчитать по формулам, определяется по фактическим, нормативным или паспортным данным машины.
3. ПРОЕКТИРОВАНИЕ МЕХАНИЗАЦИИ РАБОТ В ПОС И ППР НА СТРОИТЕЛЬСТВО МОСТОВ
Проект организации строительства (ПОС) и проект производства работ (ППР) представляют собой разделы организационно-технологической документации. В них разрабатываются вопросы сооружения моста во взаимосвязи с решениями основных конструкций моста и вспомогательных конструкций, необходимых для их возведения. При двухстадийном проектировании ПОС разрабатывают на первой стадии - в проекте (ТЭО, инженерном проекте) моста, а ППР - на стадии подготовки строительства на основании рабочей документации (РД) и ПОС. При проектировании моста в одну стадию (рабочий проект) также выполняют РД и ПОС, а на их основе - ППР [8], [18].
В ПОС разрабатывают вопросы организации строительства объекта (комплекса объектов) в целом, т.е. в этом разделе проектной документации осуществляют общее проектирование производственной системы для возведения моста по выбранному варианту [19]. Одной из основных подсистем производственной системы является комплекс машин (КМ), методика разработки которого в ПОС сводится к следующему.
Проектной организации-составителю ПОС, в числе прочих исходных данных, выдаются заказчиком: сведения о наличии в районе строительства местных строительных материалов (камня, щебня, гравия, песка, леса и др.) с указанием вида транспорта для их доставки: данные о наличии в районе строительства железных и автомобильных дорог; рекомендации по месту выбора строительной площадки; рекомендации по транспортным схемам доставки материалов и конструкций.
Основными документами ПОС являются: календарный план строительства; строительные генеральные планы; организационно-технологические схемы (ОТС); ведомости объемов строительно-монтажных работ; графики потребности в ресурсах строительства; пояснительная записка.
Производственная система формируется с целью реализации определенной технологии строительства, причем структура работ переменна во времени и подчиняется принятой последовательности работ на объекте. Составление ПОС необходимо начинать с решения вопроса о последовательности работ, сделав первые наметки по календарному плану. Одновременно разрабатывается ОТС по возведению основных частей моста: опор, пролетных строений, насыпей подходов, регуляционных сооружений. Как видим, в исходных данных не задаются ограничения по применению типов и марок машин. К тому же до проведения подрядных торгов возможности строительной организации известны лишь приблизительно. Таким образом, в ПОС должны быть приняты оптимальные решения по комплексу машин (КМ).
При разработке организационно-технологических схем для каждого вида работ назначается технологический комплект машин (ТКМ) и решаются вопросы взаимосвязи работы ТКМ. Для этого составляется график потребности в основных строительных машинах и транспортных средствах по строительству в целом, скоординированный с календарным планом строительства. Ведомость потребности в машинах, оборудовании и транспортных средствах приводится в пояснительной записке к ПОС.
На строительных генеральных планах показывают размещение основных машин и пути их передвижения по стройплощадке; постоянные и временные транспортные коммуникации; приводят ведомость машин и механизмов, предназначенных для работы на стройплощадке (краны, обслуживающие склады, причалы и т.п.).
В зависимости от сроков строительства и объемов работ, по решению подрядчика проект производства работ (ППР) может быть разработан на строительство объекта в целом, на возведение его отдельных частей (по мере строительства) либо на выполнение отдельных технически сложных строительных и монтажных работ [19]. ППР разрабатывается организацией-подрядчиком или специализированной проектно-технологической организацией. Они должны передать его на строительную площадку не позднее начала соответствующих работ.
В числе исходных данных для разработки ППР должны быть уже конкретные условия поставки материалов и конструкций, использования строительных машин и транспортных средств, организации строительства.
В состав ППР входят: план-график производства работ; строительный генеральный план; графики поступления на объект и движения по объекту основных ресурсов строительства; технологические схемы (карты); схемы строповки грузов; пояснительная записка и некоторые другие документы.
Решения ППР носят уточняющий, конкретизирующий характер по отношению к ПОС. Поскольку в ППР детально проектируется технология отдельных сложных видов работ, основным документом здесь являются технологические схемы (ТС) или карты (ТК). ТК обычно составляются на возведение типовых конструкций мостов. При разработке ТС (в случае индивидуального проектирования) в рамках рассматриваемой технологии решают задачу формирования оптимального технологического комплекта машин (ТКМ). Результат отражают в виде ведомости потребного оборудования, машин и механизмов для данного вида работ, помещаемой на ТС.
В ППР более детально, чем в ПОС, составляют график движения по объекту основных строительных машин, увязанный с планом-графиком производства работ. На строительном генеральном плане показывают размещение основных машин и пути их передвижения по стройплощадке; зоны потенциально действующих опасных производственных факторов, связанных с работой машин; ограждения зон и другие решения по технике безопасности.
При составлении ПОС и ППР для получения наибольшего конечного эффекта от применения комплексной механизации в строительстве необходимо, чтобы при любом сочетании машин прежде всего удовлетворялось требование соответствия технических и технологических параметров машин, работающих в одном комплекте.
Ведущая машина ОКМ пли ТКМ по производительности должна обеспечивать выполнение объемов работ в заданные сроки. Ведущая машина определяет общую эксплуатационную производительность комплекта и в большинстве случаев оказывает влияние па выбор типов и мощности комплектующих машин.
При назначении состава ТКМ необходимо исходить из условия максимально полного использования производительности ведущей машины, не ниже которой должна быть и эксплуатационная производительность вспомогательных машин (транспортных средств).
Выбор состава ТКМ осуществляется в два этапа.
На первом этапе в зависимости от технологических характеристик процесса и особенности возводимой конструкции определяют необходимые технические параметры ведущих машин, их типы и типоразмеры, а также состав технологически необходимых вспомогательных машин, их типы и типоразмеры. Для этого могут использоваться типизированные составы комплектов машин, содержащиеся в технологических картах и проектах-аналогах. В результате подбора состава ТКМ определяется несколько возможных вариантов комплекта.
На втором этапе выбирается оптимальный вариант состава ТКМ на основании сравнительной технико-экономической оценки.
При выборе оптимального варианта ТКМ учитывается не только производительность комплекта, которая, безусловно, является важным, но далеко не единственным показателем (критерием) эффективности. Обычно приходится иметь дело с комплексом показателей, которые можно объединить в четыре группы.
Технологические показатели отражают равномерные, объемные, скоростные, грузоподъемные и другие характеристики машины. Эти показатели дают представление о пригодности машины для работы и обычно выступают в качестве условий, ограничивающих выбор.
Производственные показатели определяют количество и качество продукции, которая производится за единицу времени, выработку машины, интенсивность использования и т.п. Эти показатели, среди которых обязательно присутствует производительность машины, чаще всего и являются объектом выбора.
Расходно-эксплуатационные показатели характеризуют натуральные затраты ресурсов на эксплуатацию техники, т.е. расход материалов, энергии, топлива, труда и т.п. на единицу времени или продукции.
Стоимостные показатели представляют собой денежное выражение различного рода затрат, сопровождающих данную механизированную работу. Они являются обобщенным критерием для выбора варианта, оптимального в экономическом отношении.
Однако, как сказано в разд. 2, выбор оптимального варианта ТКМ, удовлетворяющего заданным срокам производства данной работы, еще не означает, что директивный срок выполнения комплекса работ будет обеспечен. Дело в том, что работа единичных комплектов машин характеризуется неравномерностью, к тому же существенное влияние может оказывать взаимодействие отдельных ТКМ в структуре комплекса машин (КМ) строительства объекта в целом. Все это приводит к тому, что прогнозируемая (вероятная) производительность отдельных машин в рамках единой системы КМ может оказаться намного ниже эксплуатационной производительности ТКМ, рассматриваемых обособленно. Более того, при объединении отдельных ТКМ в систему КМ она может перейти в ранг так называемых запредельных систем, обладающих нежизнеспособными характеристиками.
Чтобы получить значения прогнозируемой производительности ТКМ и КМ, необходимо произвести анализ систем на основе методов, указанных в разд. 2.
Выбор оптимального варианта комплекта или комплекса машин характеризуется многокритериальностью. Система критериев оптимальности для комплектов и комплексов машин предложена в книге автора [15].
4. СПЕЦИАЛЬНЫЕ МАШИНЫ ДЛЯ ПРОИЗВОДСТВА ЗЕМЛЯНЫХ РАБОТ
Специфика производства земляных работ при строительстве мостов обусловлена подводной разработкой грунта в котлованах опор, во внутренних полостях свай-оболочек, при дноуглублении и т.п.
Как правило, строители стремятся удалить грунт из котлованов опор до начала работ по устройству свайного фундамента. Это позволяют высокопроизводительные экскаваторы типа обратная лопата, драглайны, грунторазрабатывающее навесное оборудование (грейферы) на краны. Если несвязный грунт из затопленных котлованов приходится удалять после погружения свай, используют специальные средства гидромеханизации - гидроэлеваторы и эрлифты, которые применяют также для разработки несвязного грунта во внутренних полостях свай-оболочек.
Принцип работы гидроэлеватора основан на известном положении о том, что с увеличением скорости движения струи жидкости давление в ее зоне снижается. В зону пониженного давления устремляется пульпа (взвесь частиц грунта в воде), которая, смешиваясь с напорной водой, получает от нее кинетическую энергию и поднимается по трубе (рис. 2). При давлении воды 0,4 - 0,8 МПа высота всасывания Н достигает 1 - 1,5 м, высота нагнетания h - 6 - 7 м. Воду подают по водоводу насосом высокого давления (с напором 30-150 м).
Производительность гидроэлеватора зависит от расстояния между отверстием всасывающей трубы и поверхностью разрабатываемого грунта. Его оптимальное значение определяют по содержанию грунта в пульпе. Для этого гидроэлеватор подвешивают к крюку крана, постепенно перемещая его концентрическими кругами по площади котлована, и выбирают положение, соответствующее выходу пульпы с максимальным содержанием грунта. Гидроэлеватор работает тем производительнее, чем меньше высота подъема пульпы. Он может работать при минимальном заглублении (10 - 20 см) низа всасывающей трубы в воду. Расход воды - 50-100 м3 на 1 м3 пульпы. Эти устройства надежны в работе, но обладают низким к.п.д.
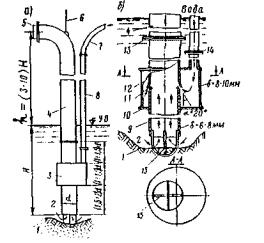
Рис. 2. Схема разработки грунта гидроэлеватором:
а - положение гидроэлеватора в котловане; б - схема работы; 1 - грунт; 2 - вода; 3 - гидроэлеватор; 4 - пульпопровод; 5 - резиновый шланг: 6 - трос; 7 - шланг для воды; 8 - водовод; 9 - всасывающая труба; 10 - крышка камеры; 11 - кольцевая щель; 12 - камера; 13 - фланцево-болтовой стык; 14 - стык водовода; 15 - сетка
Эрлифт , воздушный водоподъемник, несмотря на сравнительно малый к. п. д (менее 36%), имеет ряд достоинств: простота устройства, надежность и бесперебойность работы. Сжатый воздух под давлением нагнетается по газовой трубе 8 в жидкостную трубу 4, где образуется смесь воздуха с пульпой (эмульсия). Вследствие того, что объемная масса эмульсии меньше массы воды, окружающей эрлифт, под избыточным давлением воды пульпа отжимается по трубе эрлифта вверх (рис. 3). Рабочее давление воздуха, развиваемое компрессором, определяется формулой р ≈ 10(Н-h) кН/м2. Расход воздуха - 1-4 м3 на 1 м3 пульпы.
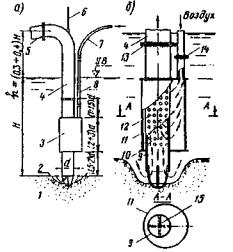
Рис. 3. Схема разработки грунта эрлифтом:
а - положение эрлифта в котловане; б - схема работы; 1 - грунт; 2 - вода; 3 - эрлифт; 4 - пульпопровод; 5 - резиновый шланг для пульпы; 6 - трос; 7 - шланг для воздуха; 8 - воздухопровод; 9 - всасывающая труба; 10 - крышка камеры; 11 - камера; 12 - отверстие d = 4-6 мм; 13 -стык пульпопровода; 14 - стык воздухопровода; 15 - сетка
Эрлифт, как и гидроэлеватор, подвешивают к крану. Это делают для того, чтобы выбрать оптимальное расположение низа всасывающей трубы по отношению к поверхности разрабатываемого грунта. При этом требуется, чтобы величина заглубления низа эрлифта в воду в 2-3 раза превышала высоту подъема пульпы над уровнем воды в котловане.
Производительность гидроэлеваторов и эрлифтов в средних грунтовых условиях - 5 - 20 м3/ч при насыщении пульпы грунтом от 5 до 20%.
Для подводных дноуглубительных работ обычно применяют плавучие землесосные снаряды (земснаряды). С их помощью разрабатывается несвязный грунт путем всасывания его из воды. Пульпа забирается центробежным водяным насосом - землесосом и транспортируется по трубам-пульпопроводам. Если всасывание грунта происходит с одновременным механическим рыхлением под водой, то такой способ называется рефулерным.
Для дноуглубления обычно применяют земснаряды со свайным папильонированием, которые разрабатывают подводную траншею (прорезь) захватками при последовательном движении от стоянки к стоянке. На каждой стоянке понтон земснаряда «закалывают» сваями в грунт. При вращении (папильонировании) в горизонтальной плоскости вокруг свай земснаряд секторами разрабатывает грунт прорези.
Земснаряд (рис. 4, табл. 1) состоит из понтона 9 с землесосом, свай 1. стрелы 4 с приемно-рыхлительным устройством. Оно, в свою очередь, состоит из фермы 7, фрезерного рыхлителя 6 и его привода 3. Для подъема и опускания фермы с рыхлителем имеется лебедка с полиспастом 5. Вращающийся рыхлитель разрушает грунт. Разрыхленный грунт по всасывающему трубопроводу 8 поступает к землесосу, которым транспортируется по пульпопроводу 2 к месту укладки. Земснаряд имеет лебедки для управления носовыми канатами при перемещении земснаряда относительно свай 1 и для подъема-опускания свай.
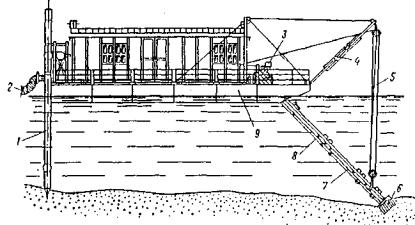
Рис. 4. Землесосный снаряд
Таблица 1
Техническая характеристика землесосных снарядов
|
Показатель |
100-40К |
300-40 |
350-50Т |
500-60 |
500-70Г |
1000-80 |
|
Расчетная производительность в грунтах II группы, м3/ч |
120 |
420 |
420 |
650 |
580 |
1270 |
|
Максимальный напор, м |
43 |
45 |
60 |
60 |
45 |
80 |
|
Максимальная глубина разработки грунта, м |
12 |
11 |
18 |
15 |
45 |
15 |
|
Минимальная ширина прорези по дну, м |
30 |
35 |
45 |
45 |
- |
53 |
|
Дальность транспортирования фунта по горизонтали, км |
1.3 |
1,6 |
2 |
2,5 |
3 |
3,5 |
|
Диаметр патрубка, мм: |
|
|
|
|
|
|
|
- всасывающего |
300 |
500 |
500 |
600 |
700 |
854 |
|
- напорного |
300 |
500 |
500 |
600 |
580 |
672 |
|
Габариты корпуса, м: |
|
- |
|
|
|
|
|
- длина |
22,21 |
30 |
38 |
37 |
73,7 |
45 |
|
- ширина |
8,08 |
9,5 |
10,4 |
10 |
15,1 |
12 |
|
- высота борта |
1,61 |
2 |
2,7 |
2,3 |
2,96 |
2,85 |
|
Установленная мощность, кВт |
491,5 |
1227 |
2300 |
2970 |
3543 |
5130 |
|
Масса, т |
112 |
212 |
470 |
400 |
1070 |
650 |
5. МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ СООРУЖЕНИЯ СВАЙНЫХ ФУНДАМЕНТОВ
В данном разделе рассматриваются средства механизации, применяемые в отечественной практике для сооружения свайных фундаментов по трем наиболее распространенным технологиям: ударной, вибрационной и технологии устройства буронабивных свай. При первых двух способах в грунт погружают готовые свайные элементы. По третьему способу железобетонную сваю формируют непосредственно в грунте, в предварительно устроенной для этого скважине.
5.1. Установки для ударного погружения свай
При ударном способе погружения свай в нескальные грунты в качестве основных рабочих органов используют свайные молоты. Независимо от конструктивного вида, чтобы придать свае поступательное движение в грунте, в молоте используется энергия падающей ударной части. Для этого ее предварительно поднимают на некоторую высоту. Поэтому все свайные молоты работают циклично: подъем (холостой ход) - падение, т.е. ускоренное движение ударной части вниз, удар по свае (рабочий ход) и т.д.
По роду привода молоты разделяются на механические, паровоздушные, дизельные и гидромолоты. В состав установки кроме молота входит поддерживающий его механизм - копер (копровое оборудование) с направляющими для движения молота и сваи.
По характеру работы различают молоты простого (одиночного) и двойного действия. В молотах простого действия рабочий ход (удар по голове сваи) происходит за счет кинетической энергии, набранной ударной частью в процессе падения. Для каждого подъема ударной части на определенную высоту используют определенный источник энергии. У молотов двойного действия его используют не только для подъема ударной части, но и для усиления рабочего хода, т.е. падения.
Основными параметрами свайных молотов являются: энергия удара, частота ударов, масса ударной части, мощность и полный вес молота.
Энергию удара молота в общем случае можно определить по формуле
E = QHη+pFH-E пот . (7)
где Q - вес ударной части, кН; Н - высота падения ударной части или ход поршня молота, м; η - к. п. д, учитывающий механические, тепловые и другие потери; р - давление газа в цилиндре молота, кН/м2; F - рабочая площадь поршня, м2; Е пот - сумма потерь энергии, кДж.
Механические молоты. Механический молот состоит из стальной литой ударной части (бабы), подвешенной на канате, который перекинут через блок в верхней части копра. Другой конец каната при подъеме ударной части наматывается на барабан фрикционной лебедки. По достижении заданной высоты подъема Н тормоз лебедки отпускают, ударная часть падает под действием силы тяжести и наносит удар по голове сваи.
Механические молоты представляют собой самые древние и примитивные орудия труда. В то же время они достаточно легки в изготовлении и применении. Но из-за малой мощности, производительности и к.п.д. сейчас их используют в основном как подручное средство для погружения небольших деревянных свай и т.п.
Паровоздушные молоты. Свайные молоты этого типа приводятся в действие энергией или сжатым до 0,5-0,7 МПа воздухом. Паровоздушный молот простого действия представляет собой чугунный корпус, одновременно являющийся паровым цилиндром и ударной частью. Внутри цилиндра находится поршень со штоком. При впуске пара или сжатого воздуха в подпоршневое пространство цилиндр поднимается. Переключением крана пар или воздух выпускается в атмосферу, и цилиндр падает, нанося удар по голове сваи (рис. 5).
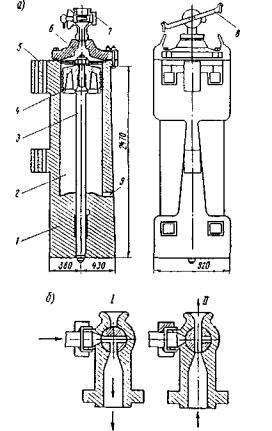
Рис. 5. Паровоздушный молот одиночного действия (пример):
а - конструкция молота; б - схема переключения (подачи) пара (воздуха); 1 - корпус; 2 - цилиндр; 3 - шток; 4 - поршень; 5 - фиксаторы молота на копровой стреле; 6 - крышка цилиндра; 7 - трехходовой кран; 8 - рычаг пробки крана; 9 - отверстие для сообщения полости цилиндра с атмосферой (I - в цилиндр молота; II - из цилиндра в атмосферу)
Управление работой паровоздушных молотов простого действия полуавтоматическое. Высоту подъема цилиндра можно регулировать, переводя рычаг газораспределения в необходимое положение. В молотах простого действия около 70% массы составляет ударная часть, что является единственным их достоинством. Существенные недостатки - малая производительность и зависимость от внешнего источника энергии (потребность в котельном или компрессорном оборудовании).
Паровоздушные молоты одиночного действия традиционно применяли для забивки свай массой до 12-15 т в нескальные грунты любой плотности (табл. 2).
Таблица 2
Техническая характеристика паровоздушных молотов одиночного действия
|
Показатель |
типа СССМ |
треста ГСФС |
Вниисдм |
||||||
|
570 |
582 |
680 |
3000 |
6500 |
8200 |
С-276 |
С-811 |
С-812 |
|
|
Масса ударной части, кг |
1800 |
3000 |
6000 |
3000 |
6500 |
8200 |
3000 |
6000 |
8000 |
|
Высота паления ударной части, м |
1,5 |
1,3 |
1,37 |
1,25 |
1,25 |
1,2 |
1,37 |
1,37 |
1,37 |
|
Энергия удара, кДж |
27,0 |
39,0 |
82,0 |
32,0 |
82,0 |
109,6 |
41,0 |
82,0 |
100,0 |
|
Частота ударов в 1 мин. |
30 |
30 |
30 |
10 |
4-10 |
4-5 |
40-50 |
40-45 |
35-40 |
|
Рабочее давление, М па |
1,0 |
1,0 |
1,0 |
0,6 |
0,8 |
0,8 |
0,7 |
0,7 |
0,8 |
|
Расход воздуха, м3/мин. |
- |
- |
- |
11 |
18 |
24 |
9 |
18-20 |
26 |
|
Расход пара, кг/ч |
350 |
550 |
1100 |
550 |
1300 |
1500 |
710 |
1250 |
1500 |
|
Высота молота, мм |
4840 |
4640 |
4960 |
2850 |
3125 |
2580 |
4650 |
4730 |
4730 |
|
Масса молота, т |
2,7 |
4,3 |
8,85 |
4,25 |
7,3 |
8,7 |
4,25 |
8,2 |
11,0 |
В отличие от молота одиночного действия, паровоздушный молот двойного действия состоит из цилиндра, поршня и соединенного с ним штоком бойка (рис. 6, табл. 3). В молотах двойного действия сжатый газ или пар подается попеременно в пространство над и под поршнем с помощью автоматически переключающегося золотника.
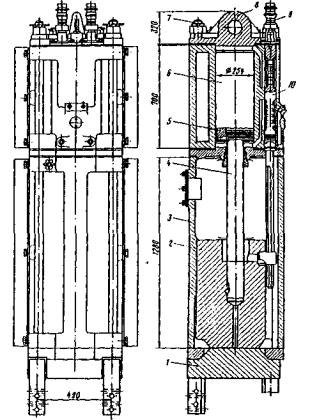
Рис. 6. Паровоздушный молот двойного действия (пример):
1 - шабот; 2 - боек; 3 - корпус; 4 - шток; 5 - поршень; 6 - цилиндр; 7 - соединительный болт; 8 - крышка цилиндра; 9 - штуцер для подвода пара (воздуха); 10 - золотник (парораспределитель)
Таблица 3
Техническая характеристика паровоздушных молотов двойного действия
|
Показатели |
С-35 |
СССМ-708 |
С-32 |
С-231 |
С-977 |
|
Масса ударной части, кг |
614 |
680 |
655 |
1130 |
2250 |
|
Высота падения ударной части, м |
0,45 |
0,406 |
0,525 |
0,58 |
0,46 |
|
Энергия удара, кДж |
10,9 |
9,5 |
15,9 |
18,2 |
17-27 |
|
Частота ударов в 1 мин |
135 |
140 |
125 |
105 |
100-105 |
|
Рабочее давление, МПа |
0,8 |
0,8 |
0,8 |
0,7 |
0,7 |
|
Расход сжатого воздуха, м3/мин |
12,8 |
12,7 |
17 |
17 |
16,5 |
|
Высота молота, мм |
2375 |
2490 |
2390 |
2689 |
3000 |
|
Масса молота, т |
3,77 |
2,97 |
4,09 |
4-15 |
5,20 |
Молоты двойного действия используют для забивки свай и шпунта массой до 6 - 7 т в нескальные грунты любой плотности.
Частота ударов молота имеет большое значение. Если они быстро следуют один за другим, изменения в сопротивлении грунта погружению не успевают закончиться между двумя подледовательными ударами. Окружающий сваю грунт будет постоянно разрыхленным, и, следовательно, его сопротивление погружению свай будет пониженным.
Благодаря автоматическому парораспределению, частота ударов молотов двойного действия доходит до 130-140 в минуту, что делает их существенно более эффективными и производительными. Кроме того, у молотов двойного действия удобно регулировать силу удара. Молоты имеют закрытый корпус, что обеспечивает возможность их использования для забивки свай, в том числе наклонных, под водой на глубине до 20 м.
Паровоздушные молоты широко использовались в отечественной практике в 30-е-50-е годы XX в., но в дальнейшем они уступили первенство дизель-молотам, которые работают автономно, имея более высокие частоту ударов и к.п.д. Но за рубежом паровоздушные молоты продолжают использовать. Там считаются эффективными молоты одиночного действия с массой ударной части до 27 т и энергией удара до 249 кДж, а также молоты двойного действия с соответствующими значениями параметров 18 т и 157 кДж. Их применяют для подводной забивки свай.
Эти представления находятся в русле тенденции к возрождению паровых машин. По расчетам специалистов, коэффициент полезного действия паровоза можно поднять до 15%. При этих условиях затраты на эксплуатацию паровых машин станут существенно ниже затрат на двигатели внутреннего сгорания. Современная паровая машина экономична из-за использования микропроцессорных систем автоматического управления, а исключение выбросов в атмосферу и замкнутый цикл придают ей высокую экологичность.
Дизель-молоты. Идея создания дизельного молота возникла в СССР в 1928 г., но авторство приписывают немецкому инженеру Шмидту. Начало широкого применения дизель-молотов в нашей стране относится к 1940-м годам.
Дизель-молот представляет собой прямодействующий двигатель внутреннего сгорания, работающий по принципу двухтактного дизеля. Ударная часть молота при совершении рабочего хода сжимает заключенный в цилиндре воздух, значительно повышая его температуру. Подаваемая в это время в цилиндр горючая смесь (дизельное топливо) взрывается и отбрасывает ударную часть вверх, совершая холостой ход. При падении ударной части рабочий цикл повторяется и т.д.
По типу направляющих для ударной части дизель-молоты делятся на штанговые и трубчатые (рис. 7).
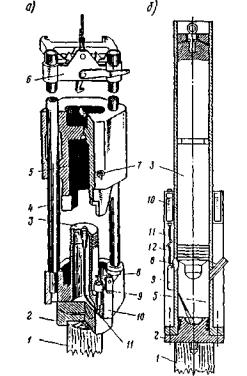
Рис. 7. Дизельные молоты:
а - штанговый; б - трубчатый; 1 - свая; 2 - шабот; 3 - поршень; 4 - направляющие штанги; 5 - цилиндр; 6 - устройство для подъема цилиндра; 7 - штырь; 8 - рычаг подачи топлива; 9 - топливный насос; 10 - топливный бак; 11 - трубка для подачи топлива; 12 - выхлопное отверстие
В штанговых молотах ударной частью является цилиндр, перемещающийся по двум направляющим штангам (рис. 7, а). Молоты такого типа имеют небольшие габариты и массу ударной части 600-2500 кг, а также низкий к.п.д. и энергию удара до 20 кДж. Поэтому их в основном используют для забивки (может быть, бескопровой) легких деревянных свай.
В трубчатых молотах одиночного действия ударная часть представляет собой поршень, который перемещается внутри цилиндра и направляющей трубы и создает давление (компрессию) в цилиндре (рис. 7, б). Молот подвешивают на направляющей стреле копра. Его запуск производится специальным механизмом - «кошкой», которая входит в зацепление с кольцевой выточкой поршня. «Кошка», перемещаемая лебедкой вверх по направляющей копра, поднимает ударную часть и автоматически сбрасывает ее на заданной высоте. Падающий поршень надавливает на рычаг топливного (плунжерного) насоса, который впрыскивает топливо в камеру сгорания. В камере под действием удара поршня о шабот горючая смесь разбрызгивается и воспламеняется. От давления образовавшихся газов поршень подбрасывается вверх, а выхлоп выходит в атмосферу через отверстия в цилиндре.
Отечественной промышленностью выпускается параметрический ряд дизель-молотов с воздушным и водяным охлаждением (табл. 4). Зарубежные фирмы Dellmag, Menck (Германия), Ge ra Hummers (Голландия), Mitsubishi, Kobe Steel (Япония) и др. также широко выпускают трубчатые дизель-молоты с близкими нашим значениями параметров. При этом масса ударной части отдельных образцов в средних условиях может доходить до 10-15 т, а энергия удара - до 400 кДж. Используются (например, фирмой Link Belt) и трубчатые дизель-молоты двойного действия (по принципу, аналогичному паровоздушным молотам), имеющие в 1,5-2 раза большую частоту ударов.
Таблица 4
Техническая характеристика трубчатых дизель-молотов отечественного производства
|
Показатели |
УР 1250 |
УР-1800 |
С-949Б |
С-954К |
С-974К |
- |
|
СП-75 |
СП-76 |
CП-77 |
СП-78 |
СП-79 |
СП-84 |
|
|
Масса ударной части, кг |
1250 |
1800 |
2500 |
3500 |
5000 |
7500 |
|
Полный ход поршня, м |
3,0 |
3,0 |
3,2 |
3,2 |
3,2 |
3,8 |
|
Наибольшая потенциальная энергия удара Е h , кДж |
36,8 |
53,0 |
73,5 |
103,0 |
147,0 |
243,0 |
|
Расчетная энергия удара E d , кДж |
30,4 |
44,1 |
61,8 |
86,3 |
123,5 |
184,3 |
|
Частота ударов в 1 мин |
43-55 |
43-55 |
43-55 |
43-55 |
42 |
42 |
|
Высота молота, м |
4,4 |
4,4 |
5,2 |
5,5 |
5,5 |
6,2 |
|
Масса молота, т |
2,7 |
3,9 |
5,8 |
7,8 |
9,6 |
16,0 |
|
Рекомендуемая масса забиваемых свай, т |
1,5-4,0 |
2,0-5,0 |
3,0-7,0 |
4,0-10,0 |
5,0-15,0 |
8,0-22,0 |
Примечания: 1) первая марка - молот с воздушным, вторая - с водяным охлаждением;
2) выпускают также молоты типа УРБ - быстроходные, с частотой ударов 65 в мин.
Основными достоинствами дизель-молотов являются: независимость от внешних источников энергии, быстрота подготовки к работе, невысокая стоимость изготовления, простота и удобство эксплуатации в условиях любых температур, высокая производительность.
Однако применение дизель-молотов в зарубежных странах неуклонно сокращается. Предпочтение отдается гидромолотам. Немалую роль в этом играют экологические соображения.
Гидромолоты. Тенденцию к созданию молотов повышенной мощности с регулируемой силой удара можно проследить на примере работ голландской фирмы HBG, которая с 1964 года работает над созданием молотов с гидравлическим приводом. С 1969 года она начала серийный выпуск гидромолотов, которые быстро завоевали популярность во всем мире.
В гидромолотах подъем ударной части производится регулируемым давлением жидкости. Она подается гидронасосом в пространство под поршнем основного гидроцилиндра, соединенного штоком с ударной частью (рис. 8 и 9). При рабочем ходе ударной части жидкость перетекает через перепускной клапан из полости гидроцилиндра под поршнем в полость над ним, сообщая работе машины эффект двойного действия. Гидравлическая жидкость (минеральное масло или вода) подается гидронасосом производительностью до 400 - 700 л/мин под давлением до 300 - 400 атм.
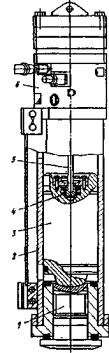
Рис. 8. Гидромолот двойного действия:
1 - шабот; 2 - направляющая труба; 3 - ударная часть; 4 - упругий шарнир (тарельчатые пружины); 5 - шток гидроцилиндра; 6 - рабочий (главный) цилиндр
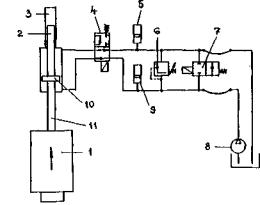
Рис. 9. Принципиальная схема управления гидромолотом:
1 - ударная часть; 2, 3 - направляющие; 4 - главный клапан; 5 - гидроаккумулятор низкого давления; 6 - клапан избыточного давления; 7 - перепускной клапан; 8 - гидронасос; 9 - гидроаккумулятор высокого давления; 10 - главный цилиндр; 11 - шток гидроцилиндра
Характерными особенностями гидромолотов являются: возможность регулирования силы и частоты ударов; более длительное действие ударного импульса; возможность синхронной работы нескольких молотов; возможность использования молотов для забивки свай в воде; экологичность. Наряду с этим отметим, что гидромолоты обладают меньшей энергией удара в сравнении с дизель-молотами той же массы (табл. 5).
Таблица 5
Техническая характеристика гидромолотов фирмы Junttan (Финляндия)
|
Показатели |
ННК-4 |
ННК-5 |
ННК-6 |
ННК-7 |
ННК-10 |
ННК-14 |
|
Масса ударной части, кг |
4000 |
5000 |
6000 |
7000 |
10000 |
14000 |
|
Полный ход поршня, м |
1,2 |
1,2 |
1,2 |
1,2 |
1,2 |
1,2 |
|
Наибольшая потенциальная энергия удара Eh , к дж |
48,0 |
60,0 |
72,0 |
81,0 |
120,0 |
168,0 |
|
Частот ударов в 1 мин: |
|
|
|
|
|
|
|
- при мин. ходе поршня |
100 |
100 |
100 |
100 |
100 |
100 |
|
- при ходе поршня 0,5 м |
60 |
60 |
60 |
60 |
60 |
60 |
|
- при макс. ходе поршня |
30 |
30 |
30 |
30 |
30 |
30 |
|
Высота молота, м |
4,94 |
5,31 |
5,68 |
6,05 |
5,95 |
6,95 |
|
Масса молота, т |
6,3 |
7,4 |
8,6 |
9,7 |
14,8 |
19,0 |
|
Производительность гидронасоса, л/мин |
300 |
300 |
300 |
300 |
600 |
600 |
|
Рабочее давление в гидросистеме, атм. |
140 |
150 |
160 |
185 |
150 |
185 |
|
Установленная мощность, кВт |
70 |
75 |
80 |
93 |
150 |
185 |
В настоящее время в России кроме установок финской фирмы Junt t an имеются сваебойные агрегаты фирмы Liebherr (Германия) с гидромолотами фирмы Menck, гидромолоты I НС (Голландия). BSP (Великобритания) и др. Молоты МНР фирмы Menck при массе ударной части 4-20 т имеют потенциальную энергию удара соответственно от 35 (45 с усилением) до 200 (225) кДж при полной массе молота от 6,7 до 28 т и частоте ударов от 40 - 50 до 60 - 85 в минуту.
Для погружения свай больших размеров за рубежом используют групповые гидромолоты, суммарная масса ударной части которых доходит до 40 т, а энергия удара - до 500 кДж при массе группы до 60 т.
Фирмой РОПАТ созданы отечественные гидромолоты МГ5, МГ6, МГ7 и др. Молот МГ5 имеет массу ударной части 5,2 т, максимальную энергию удара 50 кДж, число ударов в минуту - 50 - 60 и предназначен для погружения железобетонных свай массой до 5 т. Молот МГП100 (молот гидравлический подводный) с массой ударной части 6 т, максимальной энергией удара 100 кДж и частотой ударов в минуту - 42, предназначен для забивки стальных трубчатых свай под водой. Налаживается производство более тяжелых молотов типа МГ с массой ударной части 10-20 т.
Подбор молота для погружения заданных свай в заданные грунты осуществляется по четырем условиям [20].
1. Энергия удара молота Eh , кДж, необходимая для достижения расчетной вертикальной нагрузки на сваю N, кН, должна быть не менее
Eh ≥ 0,045N. (8)
При погружении наклонных свай Eh определяют с учетом повышающего коэффициента, значения которого принимают равными 1,1; 1,15 и 1,25 для свай с наклонами к вертикали соответственно 5:1; 4:1 и 3:1.
2. Выбираемый тип молота должен удовлетворять условию
K ≥ ∑q/Ed , (9)
где K - коэффициент применимости молота (табл. 6); ∑q - суммарная масса молота q1 сваи с наголовником q2 и подбабка q3, т; Ed - расчетная (паспортная) энергия удара молота, кДж.
Таблица 6
Коэффициент применимости молота
|
Тип молота |
К.п.д. удара ? |
Коэффициент К, т/кДж, при материале свай |
||
|
железобетон |
сталь |
дерево |
||
|
Механический (простой подвесной) |
1,0 |
0,30 |
0,25 |
0,20 |
|
Трубчатый дизель-молот, паровоздушный двойного действия, гидромолот |
0,9; 0,85; 0,9 |
0,60 |
0,55 |
0,50 |
|
Штанговый дизель-молот, паровоздушный молот одиночного действия |
0,4; 0,8 |
0,50 |
0,40 |
0,35 |
3. Во избежание дополнительных мероприятий, значение необходимой энергии удара молота, обеспечивающей погружение свай в грунт, должно быть не менее
Eh ≥ ∑fjlj(n + q2/Q)/Nу , (10)
где fj - несущая способность сваи в пределах j-гo слоя грунта, кН; lj - толщина j-гo слоя грунта, м; n - параметр, принимаемый 5,5 для трубчатых и 4,5 для штанговых дизель-молотов, а для других типов молотов - по аналогии с табл. 2; Ny - общее число ударов молота, необходимое для погружения сваи, которое можно рассчитать по формуле [21]
![]() (11)
(11)
где Р i - динамическое сопротивление грунта в i -м слое, определяемое по методике расчета несущей способности сван по грунту СНиП 2.02.03-85* [22]; li - толщина слоя; k i - коэффициент, зависящий от точности расчетов и типа свайного молота; Q i q i - соответственно масса ударной части молота и масса сваи; E р i - расчетная энергия молота при ударе ( 7); с i - суммарная упругая деформация наголовника, сваи и грунта.
4. Значение контрольного отказа S а сваи от одного удара при последнем (контрольном) залоге в 10 ударов должно удовлетворять условию
![]() (12)
(12)
где β - коэффициент материала сваи, принимаемый 1000; 1500; 5000 кН/м2 для деревянных, железобетонных, стальных свай соответственно; Fd - расчетная несущая способность сваи по грунту, кН; А - площадь поперечного сечения сваи, м2.
5. Для молота, который удовлетворяет всем четырем условиям, надо также проверить условие бездефектного погружения сваи
Ny ≤ N пp , (13)
где N пр - предельно допустимое количество ударов молота по условию выносливости сваи (см. [21]).
С применением изложенной выше методики производят прогнозирование бездефектной технологии погружения свай. Для иллюстрации методики расчета приведем практический пример.
Пример 2 . Согласно рабочим чертежам фундамент под опору моста запроектирован из четырех рядов свай, объединенных общим ростверком. Сваи в крайних рядах имеют наклон к вертикали 4:1. Приняты типовые призматические железобетонные сваи поперечным сечением 35×35 см длиной 12 м, погружаемые в грунт забивкой на глубину 11 м. Расчетная вертикальная нагрузка на голову сваи - N=770 кН (78,5 тс).
Вначале выберем способ погружения и параметры свайного молота.
По формуле ( 8) определяем энергию удара молота, необходимую для достижения расчетной вертикальной нагрузки на сваю
Eh ≥ 0,045×770×1,15 = 39,8 кДж.
По табл. 5 принимаем гидромолот Junttan марки ННК-4 с массой ударной части Q=4,0 т, имеющий параметры: Е h = 48,0 кДж; q 1 = 6,3 т.
К.п.д. удара рассчитываем по формуле (2.12) [21] при q гр = 0 и ε2 = 0,2:

где ∑qi = 6,3+0,352×12×2,45+0,4 = 10,3 т.
Тогда по формуле (2.5) расчетная энергия удара составляет
Ed =Eh η = 48,0×0,42 = 20,2 кДж .
Выбранный тип молота проверяем по условию ( 9):
К = 0,6 т/кДж > ∑q/E d = 10,3/20,2 = 0,51 т/кДж.
Определим число ударов, необходимое для погружения сваи, при следующих грунтовых условиях:
слой 1 - суглинок мягкопластичный ( IL = 0,6), толщина 4 м;
слой 2 - суглинок тугопластичный (IL = 0,4), 4 м;
слой 3 - супесь пылеватая пластичная (IL = 0,2), 3 м.
Выполним расчет по формуле ( 11) по слоям:
Слой 1 - по формуле ( 8) СНиП 2.02.03-85* [22] вычисляем значение сопротивления погружению сваи:
P 1 = γc (γ cR RA + u∑γ cf fih i ) = 1,0×[1,0×600×0,1225+1,4×1,0×(8×2+14×2)] = 135,1 кН,
где A = 0,352 = 0,1225 м2; u = 4×0,35 = 1,4 м; значения R и fi взяты соответственно из табл. 1 и 2 [22].
Из рис. 7 [21] с1 = 0,050 м; там же по табл. 10-К = 0,6.
Тогда по формуле ( 11) число ударов для прохода сваей первого слоя составляет:
![]()
Слой 2 - аналогично слою 1 вычисляем значение сопротивления погружению сваи:
Р 2 = 1,0×[1,0×2100×0,1225+1,4×1,0×(29×2+32×2)] = = 428,0 кН,
Из рис. 7 [21] с2 = 0,024 м; там же по табл. 10-К = 0,6.
![]()
Слой 3:
P 3 = 1,0×[1,0×5000×0,1225+1,4×1,0×(63,5×2+66×1)] = 882,7 кН.
с 3 = 0,012 м; K =0,6.
![]()
Общее число ударов: Ny = 62+99+388 = 549.
Проверяем необходимость дополнительных мероприятий по облегчению погружения свай в грунт (например, применения подмыва) по условию ( 10):
Eh = 48,0 кДж > (5,5+4,0/4,0)×1,4×(8×2+14×2+29×2+32×2+63,5×2+66×1)/549 = 6,0 кДж.
т.е. дополнительные мероприятия не требуются.
Значение контрольного отказа сваи по формуле ( 12) составляет:
![]()
где расчетная несущая способность сваи по грунту определена по формуле ( 8) СНиП 2.02.03-85* [22]:
Fd = 1,0×[1,0×5120×0,1225+1,4×1,0×(8×2+14×2+29×2+32×2+63,5×2+66×1)] = 1130 кН.
Пытливый читатель должен был заметить, что второй множитель в формуле ( 12) представляет собой определенный ранее к.п.д. удара η. Так что Е h η = Ed = 20,2 кДж.
Вычисленное значение отказа сваи является контролируемым параметром технологического процесса и указывается в проекте производства работ.
Наконец, для принятого молота, который удовлетворяет всем предыдущим условиям, проверяем условие ( 13) бездефектного погружения сваи.
Полагаем, что забивка производится с наголовником, имеющим деревянную прокладку толщиной s = 0,15 м; модуль деформации древесины - Es = 3×104 тс/м2. Класс бетона сваи по прочности - В30 (E b = 3×106 тс/м2).
По формуле (1.7) [21] рассчитываем сжимающие напряжения в голове сваи при забивке:
 .
.
Затем по графику (рис. 25 [21]) или по формуле (4.1), решенной относительно l g N пр , определим допустимое количество ударов по свае из условия начала разрушения головы (значения К д.у и К в приняты по табл. 8 для данной сваи):
lg N п p = ( К д . у -s/Rb)/K д = (3,30-17,7×0,78/15,5)/0,8 = 3,01,
где 0,78 - коэффициент перехода от кубиковой прочности к призменной прочности бетона.
N пр = 1000 ударов > Ny = 549 ударов, т.е. условие бездефектного погружения свай выполняется.
Таким образом, данный пример демонстрирует выполнение технологических расчетов при погружении свай способом забивки.
Копры и копровые установки. Процесс погружения свай включает в себя подъем и установку свай в направляющие, подъем, установку на сваю и запуск молота, обеспечение совместного поступательного движения сваи и молота. Все эти функции выполняются сваебойными агрегатами - копрами.
В качестве копров могут использоваться специально созданные для этого самоходные машины или установки в виде навесного копрового оборудования на базовые машины - тракторы, экскаваторы, подъемные краны. Для перемещения копров по свайному полю при возведении речных опор устраивают подкопровые мосты, эстакады, подмости. Копры устанавливают и на плавучие средства (рис. 10, 11).
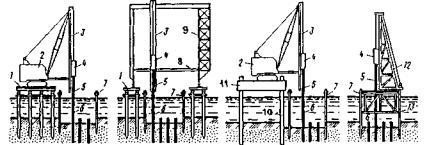
Рис. 10. Использование временных подмостей для производства свайных работ:
1 - подмости: 2 - стреловой крап: 3 - копровая стрела; 4 - молот; 5 - подбабок; 6 - свая: 7 - шпунт: 8 - распорка: 9 - портальный кран; 10 - стойки; 11 - самоподъемная платформа; 12 - копер; 13 - направляющий каркас
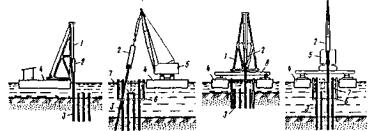
Рис. 11. Использование плавучих средств для производства свайных работ:
1 - копер; 2 - молот; 3 - свая; 4 - плашкоут: 5 - кран; 6 - ограждение котлована; 7 - направляющий каркас; 8 - подкопровой мост
Самоходный копер состоит из ходовой части, на которой установлена поворотная или неповоротная рама с размещенными на ней механизмами подъема молота, «кошки» и сваи, а также копровой стрелы (мачты), у которой есть механизмы изменения вылета и наклона (рис. 12, 13).
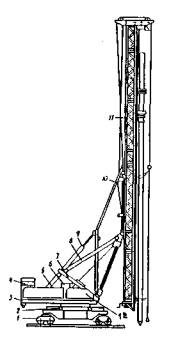
Рис. 12. Рельсовый копер СП-69:
1 - ходовая часть; 2 - опорно-поворотный круг; 3 - поворотная платформа; 4 - противовес; 5 - задняя стойка; 6 - кабина машиниста; 7 - передняя стойка; 8, 9 - гидроцилиндры; 10 - параллелограмм; 11 - мачта; 12 - лебедки
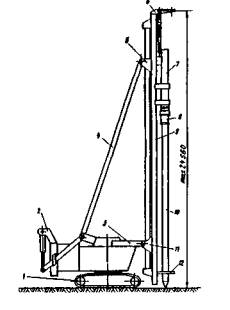
Рис. 13. Копер КН-1-16:
1 - базовая машина - экскаватор ЭО-5122А; 2 - кронштейн поворотный; 3 - механизм наведения; 4 - раскосы; 5 - верхняя каретка; 6 - оголовок; 7 - дизель-молот (гидромолот); 8 - наголовник; 9 - мачта телескопическая; 10 - свая; 11 - нижняя каретка; 12 - сваерез
При подборе копровой установки (табл. 7, 8) проверяют ее применимость по длине, массе и наклону сваи, типу и массе молота, по условиям обслуживания копром свайного поля.
Таблица 7
Техническая характеристика отечественных копровых установок для забивки свай
|
Показатели |
МСК-1 |
CП-49В |
КН-1-16 |
КГМ-16 |
CП-46КМ-12 |
C II -69 |
CI I -56 |
|
самоходные на базовой машине |
рельсовые |
||||||
|
автомобиль КрАЗ-25615 |
трактор Т-170 МБГ-1 |
экскаватор ЭО-5122А |
экскаватор ЭО-6123 |
неповоротный |
поворотные |
||
|
Высота копра полная, м |
14,9 |
18,3 |
24,56 |
25,0 |
23,4 |
24,0 |
29,0 |
|
Грузоподъемность, т: |
|
|
|
|
|
|
|
|
для молота |
3,0 |
6,0 |
6,0 |
17,0 |
6,5 |
7,0 |
12,0 |
|
для сваи |
3,0 |
6,0 |
6,0 |
6,5 |
5,5 |
7,0 |
8,0 |
|
Наклоны мачты: |
|
|
|
|
|
|
|
|
назад |
4:1 |
3:1 |
3:1 |
3:1 |
3:1 |
3:1 |
3:1 |
|
вперед |
4:1 |
8:1 |
8:1 |
8:1 |
8:1 |
8:1 |
8:1 |
|
поперек |
4:1 |
8:1 |
5:1 |
10:1 |
- |
30:1 |
- |
|
Изменение вылета мачты, м |
0,4 |
0,4 |
0,55 |
1,2 |
1,05 |
1,2 |
1,35 |
|
Масса, т: |
|
|
|
|
|
|
|
|
ударной части молота |
1,25 |
2,5 |
2,5 |
3,5-7,5 |
2,5 |
2,5 |
3,5-5,0 |
|
копровой установки без молота |
22,9 |
28,6 |
54,0 |
70,0 |
15,5 |
26,0 |
54,3 |
|
навесного оборудования |
9,4 |
9,14 |
17,0 |
17,0 |
- |
- |
- |
|
Установленная мощность, кВт |
160 |
96 |
125 |
150 |
21 |
28 |
72 |
Таблица 8
Техническая характеристика зарубежных копровых установок для забивки свай
|
Показатели |
РМ -20 Junttan Финляндия |
М -90 Men с k Германия |
M H -32103 Delmag Германия |
LS -108RH Sumitomo Япония |
Kobe Steel Япония |
KH -500L-PD Hitachi Япония |
L -77 Landswerk Швеция |
|
самоходные на базовой машине |
|||||||
|
гусеничный экскаватор |
экскаватор IME |
гусеничный экскаватор |
гусеничный кран г.п. 40 т |
гусеничный кран или экскаватор |
гусеничный кран г.п. 100 т |
гусеничный кран или экскаватор |
|
|
Высота копра полная, м |
22,0 |
19,5 |
22,0 |
24,0 |
21,0 |
32,0 |
21,7 |
|
Грузоподъемность, т: |
|
|
|
|
|
|
|
|
для молота |
6,0 |
4,5 |
11,0 |
6,3 |
3,2 |
19,2 |
4,0 |
|
для сваи |
6,0 |
3,0 |
6,0 |
5,0 |
3,7 |
15,0 |
4,0 |
|
Наклоны мачты: |
|
|
|
|
|
|
|
|
назад |
3:1 |
4:1 |
3:1 |
- |
2,5:1 |
3:1 |
3,5:1 |
|
вперед |
3:1 |
4:1 |
6:1 |
- |
- |
8:1 |
3,5:1 |
|
поперек |
5:1 |
20:1 |
15:1 |
- |
- |
8:1 |
4:1 |
|
Изменение вылета мачты, м |
1,5-6,0 |
1,75-6,0 |
1,2-6,3 |
5,6 |
5,0 |
- |
4,6 |
|
Масса, т: |
|
|
|
|
|
|
|
|
ударной части молота |
до 6,0 |
2,2 |
4,6 |
- |
- |
7,2 и 8 |
- |
|
копровой установки без молота |
40,0 |
- |
58,0 |
60,6 |
- |
160,0 |
39,0 |
|
навесного оборудования |
- |
- |
14,0 |
- |
5,77 |
30,4 |
7,2 |
|
Установленная мощность, кВт |
122 |
- |
18,5 |
63 |
70 |
180 |
100 |
Самоходные рельсовые копры ( рис. 12) - традиционные средства забивки сваи. Однако у них большой вес, высокая трудоемкость сборки-разборки, малая маневренность, и они требуют устройства рельсовых путей. Поэтому при строительстве мостов преимущество отдается самоходным копрам на гусеничном ходу.
Все шире входят в практику также бескопровые сваебойные установки (пример см. на рис. 14). Когда ими пользуются, сваю надо предварительно надежно зафиксировать в направляющих или лидерной скважине. Установка закрепляется на голове сваи при помощи крана, а затем запускается и работает автономно.
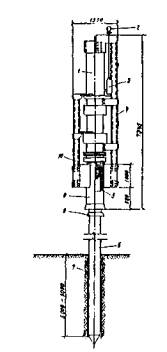
Рис. 14. Бескопровая сваебойная установка:
1 - дизель-молот; 2 - строповочная серьга; 3 - «кошка» 4 - направляющая для молота и «кошки»; 5 - кольца 6 - свая; 7 - лидерная скважина; 8 - наголовник 9 - стакан; 10 - рама
5.2. Вибропогружатели
Способ вибропогружения применяют для заглубления в нескальные грунты на глубину 20-70 м преимущественно железобетонных, металлических или комбинированных свай-оболочек диаметром 1-3 м.
Различают низкочастотные (с циклической частотой колебания (о менее 10 Гц) и высокочастотные (с частотой свыше 16,6 Гц) вибропогружатели.
Первые отечественные низкочастотные (300...500 об/мин) вибропогружатели ВП-1 и ВП-3 для погружения свайных элементов большого поперечного сечения и длины были созданы в НИИ Мостов при ЛИИЖТе в 1950-1952 гг. Они явились прообразом многих последующих конструкций.
Механический вибропогружатель включает в себя: собственно вибратор, состоящий из нескольких грузовых валов с насаженными на них тяжелыми эсцентриками; приводной электродвигатель с редуктором для передачи крутящего момента валам; наголовник для жесткого прикрепления вибратора к свае (рис. 15).
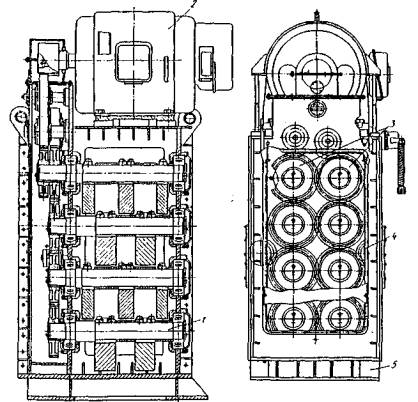
Рис. 15. Низкочастотный вибропогружатель ВПМ-170:
1 - эксцентриковые валы; 2 - электродвигатель; 3 - блок шестерен; 4 - синхронизирующие шестерни; 5 - фланец
В процессе вращения в разные стороны грузовых валов, соединенных синхронизирующими шестернями, возникает направленная вдоль вертикальной оси вибратора знакопеременная вынуждающая сила, которая изменяется по гармоническому закону. Максимальное значение вынуждающей силы можно определить по формуле
P в = Qэeω2/g, (14)
где Qэ - вес эксцентрикой; е - расстояние от оси вращения до центра тяжести эксцентриков; ω - угловая скорость вращения грузовых валов; g - ускорение силы тяжести (g = 9,81 м/с2).
Произведение Qэ·е представляет собой суммарный грузовой момент М эксцентриков вибратора и вместе с вынуждающей силой Р в является одной из основных его характеристик.
Под действием вибратора, жестко соединенного со сваей, в нелинейной динамической системе вибратор-свая-грунт возникают продольно направленные колебания с амплитудой А. Если амплитуда достигает критического значения, при котором происходит преодоление сил трения по боковой поверхности, свая, проскальзывая в грунте, периодически надавливает нижним концом на него, преодолевая его сопротивление и в этой зоне. Амплитуда А0 колебаний вибросистемы после срыва сил трения в основном зависит от величины грузового момента и массы вибросистемы:
А 0 = Qэe/(Q в + Q св = М/ G , (15)
где Q в и Q св - вес вибратора с наголовником и сваи соответственно.
В последние десятилетия больше других использовался для погружения железобетонных свай-оболочек диаметром 1,6 м и 3,0 м длиной до 60-70 м отечественный вибропогружатель ВП-160 (ВП-170, BПM-170) - см. рис. 15. Характерной его особенностью является использование двухскоростной схемы вращения грузовых валов, из которых половина вращается с удвоенной скоростью. Поэтому вынуждающая сила, направленная вниз, превышает силу, направленную вверх.
Обычно вибропогружатель закрепляют па свае болтами посредством наголовника (рис. 16). При погружении свай-оболочек Ø 3,0 м применяют спаренный вибропогружатель из двух вибропогружателей ВПМ-170, установленных на едином наголовнике. Совместность колебаний вибропогружателей обеспечивается соединением их синхронизирующими шестернями 4 (см. рис. 15).
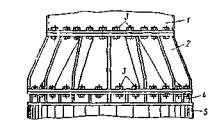
Рис. 16. Крепление вибропогружателя к оболочке:
1 - вибропогружатель: 2 - переходной патрубок; 3 - болты крепления; 4 - фланец оболочки; 5 - оболочка
Другой конструкцией вибропогружателя является модель с проходным отверстием в центральной части, что позволяет извлекать грунт грейфером из полости оболочки, не снимая вибропогружателя (рис. 17). Однако такие конструкции плохо зарекомендовали себя в эксплуатации.
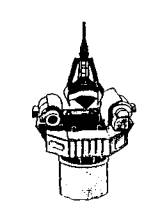
Рис. 17. Вибропогружатель с проходным отверстием ВУ-1,6
Значительное влияние на производительность погружения свай-оболочек оказывает конструкция узла крепления к ним вибропогружателя, который должен быть жестким. Но болтовые соединения, кроме периодической подтяжки гаек (из-за их отвинчивания под действием вибрации), требуют значительных затрат труда и времени на установку и снятие вибропогружателя. Безболтовые зажимные наголовники (например, гидравлические) позволяют сократить затраты труда в 8-10 раз (рис. 18).
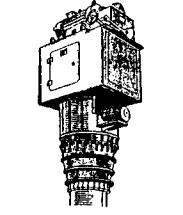
Рис. 18. Гидравлический зажимной наголовник
В процессе погружения в грунт сваи-оболочки при постоянных параметрах вибратора скорость погружения, амплитуда колебаний, сила тока и потребляемая двигателем мощность постелено снижаются. С целью оптимизации режимов погружения в 1969 г. были созданы вибропогружатели с автоматически изменяемыми параметрами. В них максимально возможная скорость погружения при минимальных затратах мощности обеспечивается путем регулирования частоты колебаний и грузового момента эксцентриков на разных стадиях погружения оболочки. Вибропогружатели типа ВРП (табл. 9) некоторыми специалистами признаются наиболее совершенными (см. [20]).
Успешный опыт создания и применения в нашей стране вибропогружателей способствовал развитию свайной вибротехники за рубежом. Так, японской фирмой Kensetsu Kikai Tesa создан параметрический ряд низкочастотных вибропогружателей с вынуждающей силой 370...2140 кН.
Таблица 9
Техническая характеристика вибропогружателей отечественного производства
|
Показатели |
ВПМ-170 |
ВУ-1,6 |
ВРП15/60 |
ВРП30/132 |
ВРП70/200 |
ВП-52Б |
|
с постоянными параметрами |
с регулируемыми параметрами |
|||||
|
Статический момент массы дебалансов М, кН·м |
7,0 |
3,4 |
0-1,5 |
0-3,0 |
2,3-7,0 |
5,2 |
|
Частота вращения дебалансов n , об/мин |
475-550 |
300-498 |
0-460 |
0-520 |
0-500 |
250-500 |
|
Вынуждающая сила максимальная P в кН |
1250-1700 |
350-960 |
348 |
895 |
2000 |
1480 |
|
м ощность основного электродвигателя, кВт |
200 |
2×90 |
60 |
132 |
200 |
2×132 |
|
Масса вибропогружателя без наголовника, т |
15,6 |
12,0 |
5,08 |
7,25 |
14,0 |
13,25 |
|
Габариты, мм: |
|
|
|
|
|
|
|
- высота |
3400 |
1910 |
2044 |
2245 |
3250 |
1880 |
|
- длина |
I860 |
3350 |
1245 |
1440 |
1700 |
3200 |
|
- ширина |
1260 |
2620 |
1114 |
1440 |
1346 |
2850 |
|
Тип гидравлического наголовника |
НГ-1,6 |
НГ-1,6 |
НГ-0,6 |
НГ-0,8 |
НГ-1,6 |
нг -3 |
Однако, недостатками вибропогружателей с электромеханическим приводом являются высокая потребляемая мощность и частый выход из строя электродвигателей из-за воздействия вибрации и сгорания обмоток, особенно в период интенсивного разгона вибросистемы.
В последние годы за рубежом наблюдается интенсивный процесс создания свайных вибропогружателей нового поколения, оснащенных гидромоторами с автономным приводом. В гидромоторе вращательное движение вала происходит под давлением рабочей жидкости (минерального масла либо воды), которая подается от насосной станции с дизельным двигателем. Но, в отличие от вибропогружателя с электромеханическим приводом, вращательное движение эксцентриковых валов совершается с меньшими амплитудами и с большей частотой. Гидровибропогружатель (рис. 19) оснащается гидравлическими захватами для свай различного типа. При погружении оболочек большого диаметра можно использовать спаренные погружатели (рис. 20). В настоящее время гидровибропогружатели выпускаются многими фирмами (табл. 10).
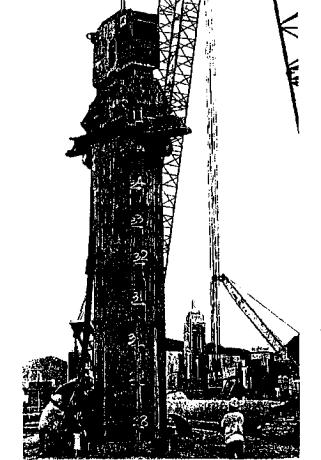
Рис. 19. Гидравлический вибропогружатель фирмы РТС (Франция)
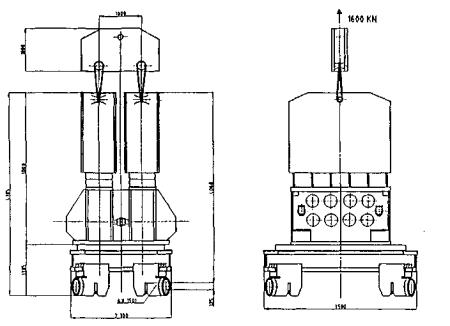
Рис. 20. Тандем из двух гидровибропогружателей 100 HD фирмы РТС, применяемый для погружения оболочек диаметром 1,3-3,0 м (вынуждающая сила - 6000 кН; масса вибромашины - 45,4 т)
Таблица 10
Техническая характеристика гидровибропогружателей зарубежного производства
|
Показатели |
J V 100 фирмы Junttan Финляндия |
MS -100 HHF фирмы Krupp Германия |
100HD фирмы Р TC Франция |
модель 400 «King Kong » фирмы АРЕ СШ A |
HV В 400 фирмы T ? nkers Германия |
1412 B фирмы I С E Голландия |
|
Статический момент, кН·м |
1,0 |
1,0 |
1,15 |
1,5 |
1,4 |
1,15 |
|
Частота вращения, об/мин |
1800 |
2156 |
1400 |
1500 |
1900 |
1350 |
|
Максимальная вынуждающая сила, кН |
2500 |
2500 |
2510 |
3559 |
4000 |
2300 |
|
Максимальная амплитуда, мм |
8 |
26 |
28 |
38 |
20,5 |
28 |
|
Масса вибропогружателя, т |
12,0 |
10,9 |
13,25 |
15,5 |
18,0 |
12,9 |
|
Габариты, мм: |
|
|
|
|
|
|
|
- высота |
3100 |
3235 |
3000 |
3048 |
3500 |
3000 |
|
- длина |
2250 |
2410 |
2300 |
2438 |
1800 |
2310 |
|
- ширина |
610 |
660 |
800 |
660 |
1400 |
760 |
В комплект вибропогружателя входит гидростанция. Например, для питания вибропогружателя JV100 применяется гидростанция JP30 с параметрами: мощность дизеля - 650 кВт (870 л.с.), максимальное давление масла в гидросистеме - 350 атм., производительность насосов - 1100 л/мин.
У гидравлических вибропогружателей основные параметры регулируются в соответствии с тем, какое сопротивление погружению испытывает свая. Максимальная частота колебаний у машин этого типа в 3-8 раз больше, чем у низкочастотных механических вибраторов, но амплитуда колебаний меньше, что несколько снижает погружающую способность.
При выборе типа вибропогружателя необходимое значение вынуждающей силы Ph, кН, определяют по формуле
Ph ≥ ( γ k N -2,8G)/Ks (16)
где γ k -коэффициент надежности по грунту, принимаемый по п. 3.10 [22]; N - несущая способность сваи по грунту; Ph≥1,3G - при погружении с извлечение грунта из полости свай-оболочек и Р h ≥2,5G - при погружении без извлечения грунта; Ks - коэффициент снижения бокового сопротивления грунта, определяемый для песчаных грунтов по табл. 11, а для глинистых грунтов - в зависимости от показателя консистенции грунта IL:
|
IL ……. |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
|
Ks ……. |
1,3 |
1,4 |
1,5 |
1,7 |
2,0 |
2,5 |
3,0 |
3,3 |
3,5 |
В зависимости от необходимой вынуждающей силы выбирается вибропогружатель наименьшей мощности.
Таблица 11
Коэффициент снижения бокового сопротивления песчаного грунта Ks
|
Типы песчаных грунтов |
Состояние грунтов |
|||
|
плотные |
средней плотности, пляжные |
водонасыщенные |
рыхлые, пляжные |
|
|
гравелистые |
2,2 |
2,6 |
2,6 |
2,9 |
|
крупные |
2,7 |
3,2 |
3,8 |
3,5 |
|
средней крупности |
4,1 |
4,9 |
6,4 |
5,4 |
|
мелкие |
4,7 |
5,6 |
8,4 |
6,2 |
|
пылеватые |
5,7 |
6,2 |
9,3 |
6,8 |
Для вибропогружателей с электромеханическим приводом на конечной стадии вибропогружения должно быть выполнено условие
Fd ≤ fr {[6000 W -2 nFs (2 Ar - v / n )]/ v + Fs ( Ks -1)+ G }. (17)
где Fd - расчетная несущая способность сваи по грунту, Fd ≥ gkN; fr - коэффициент влияния инерционных и вязких сопротивлений на несущую способность сваи (табл. 12); W - мощность, расходуемая на движение вибросистемы: W = ηWh - W0, где η - к.п.д. электродвигателя, принимаемый равным 0,83-0,90 в зависимости от нагрузки; Wh - потребляемая из сети активная мощность в последнем залоге; W0 - мощность холостого хода, принимаемая равной 25% номинальной мощности вибропогружателя, кВт; n - фактическая частота колебаний вибросистемы, мин-1 (рабочая частота вращения по паспортным данным вибратора); Fs - сила бокового сопротивления грунта при вибропогружении, кН, определяемая по формуле (18); А r - фактическая амплитуда колебаний, принимаемая равной половине полного размаха колебаний системы на последней минуте погружения; v - скорость вибропогружения, которая на последнем залоге в 3 мин должна быть не менее 2 см/мин.
Fs = 1500W/{Ar[n + (v + 2)/2A0]}. (18)
Таблица 12
Коэффициент влияния инерционных и вязких сопротивлений на несущую способность сваи fr
|
Вид грунта по боковой поверхности сваи |
Коэффициент fr |
|
Пески и супеси твердые |
1,0 |
|
Супеси пластичные, суглинки и глины твердые |
0,95 |
|
Суглинки и глины: |
|
|
полутвердые |
0,9 |
|
тугопластичные |
0,85 |
|
мягкопластичные |
0,8 |
Скорость погружения сваи-оболочки v может быть определена, исходя из величины прогнозируемого чистого времени погружения, мин [21]:
![]() (19)
(19)
где P i , Pб i , - динамическое сопротивление грунта погружению сваи в центре i -го слоя соответственно общее и по боковой поверхности; G i - суммарный вес вибросистемы, включая вес вибропогружателя Q в , наголовника Qн и сваи Q св ; li - толщина слоя; Wi - мощность вибропогружателя, идущая непосредственно на процесс погружения сваи; А i - амплитуда колебаний сваи ( 15); n в i - количество оборотов дебалансов в секунду.
Мощность вибропогружателя в формуле (19) можно определить по формуле, предложенной О.А. Савиновым (индексы i опущены):
![]() (20)
(20)
Суммарное время t погр погружения одной сваи-оболочки определяется следующим образом
t погр = t п + t ycт + t нар n c + (t вп + t под )(n c + 1) + t гp + t охл , (21)
где t ycт - время установки столба в направляющий кондуктор; tнар - время наращивания оболочки отдельными секциями с устройством стыка и гидроизоляцией; tвп - время установки и снятия вибропогружателя и подмостей; tпод - время монтажа и демонтажа подмывных устройств и эрлифта; tгр - время извлечения грунта; toxл - время охлаждения вибропогружателя и подтяжки болтов (все компоненты принимаются по ЕНиР); n с - число наращиваемых секций сваи-оболочки.
Пример 3. Прогнозирование процесса вибропогружения железобетонных свай-оболочек рассмотрим на примере фундамента опоры реального автодорожного моста.
Исходные данные: типовые сваи-оболочки наружным диаметром 1,6 м, с толщиной стенки 12 см, имеют полную длину 32 м и погружаются с открытым нижним концом на глубину 24 м. Расчетные параметры сваи-оболочки:
- площадь основания А = π×(1,62 - 1,362)/4 = 0,558 м2;
- периметр наружный и = π×1,6 = 5,02 м;
внутренний - и = π×1,36 = 4,27 м;
- полный вес сваи-оболочки:
Q св = 0,558×32×2,5 = 44,6 тс = 450 кН.
В основании опоры залегают следующие грунты:
слой 1 - суглинок текучепластичный ( IL = 0,76), толщина 8 м;
слой 2 - суглинок мягкопластичный (IL = 0,6), 4 м;
слой 3 - суглинок полутвердый (IL = 0,2) - простирается ниже.
Глубина воды в реке hw = 10 м.
Решение: прежде всего по формуле ( 11), табл. 2 и 7 [22] определим несущую способность сваи-оболочки по грунту:
Fd = γc ( γcRRA +и∑ γcffihi ) = 1,0×[1,0×(2180+1,5×10×10)×
×0,558+0,7×5,02×2,0×(4+7,4+8,8+8,8+19+20+69,2+
+72+74,8+77,6+81,8+84,6)] = 1300+3710 = 5010 кН.
Необходимое значение вынуждающей силы вибропогружателя по формуле ( 16) составляет
Ph ≥ (1,4×5010-2,8×600)/2,38 = 2241 кН,
где предварительно принимаем G = 450+150 = 600 кН. Средний по слоям коэффициент из табл. 11 равен:
К s = (3,4×8+3,0×4+1,5×12)/24 = 2,38.
Такому значению необходимой вынуждающей силы не удовлетворяет даже лучший отечественный вибропогружатель ВРП 70/200 (см. табл. 9). Принимаем по табл. 10 гидровибропогружатель марки 100НD фирмы РТС (Франция), имеющий параметры: M = 1,15 кН·м; n в = 1400 об/мин = 23,3 об/с; Р в = 2510 кН; Q в = 135 кН.
Далее определим время погружения сваи-оболочки по формуле ( 19), исходя из следующего порядка выполнения технологических операций.
Заходка 1 - вначале в направляющие устанавливают краном столб высотой 16 м. Проходят слой 1 толщиной l 1 = 8 м с оставлением в оболочке грунтового сердечника, т.е. без извлечения грунта из полости.
Р б1 = 0,7×(5,02+4,27)×2,0×(4+7,4+8,8+8,8) = 377,2 кН;
Р 1 = 1,0×(300+150)×0,558+377,2 = 628 кН;
G 1 = 450/2+135 = 360 кН.
Реальные значения вынуждающей силы и частоты вращения вибропогружателя на этой заходке:
Р в1 = (628-360)/3,4 = 79 кН;
![]()
Мощность машины, идущая непосредственно на процесс погружения сваи, по формуле ( 20) равна:
![]()
Амплитуда колебаний вибросистемы по формуле ( 15):
А 1 = 1,15/360 = 0,003 м.
По формуле ( 19) определяем время погружения сваи на заходке 1.
![]() .
.
Заходка 2 - наращивают сваю еще одной секцией длиной 8 м. Проходят слой 2 толщиной 4 м и часть слоя 3 толщиной 4 м ( l 2 = 8 м), также с оставлением в оболочке грунтового сердечника.
Р б2 = 377,2×5,02/(5,02+4,27)+0,7×(5,02+4,27)×2,0×(19+20+69,2+72) = 2547,5 кН;
Р 2 = 1,0×(1250+150)×0,558+2547,5 = 3329 кН;
G 2 = 2/3 450+135 = 435 кН;
Р в2 = (3329-435)/2,83 = 1023 кН,
где К s = (3,4×8+3,0×4+1,5×4)/16 = 2,83;
![]()
![]()
А2 = 1,15/435 = 0,0026 м;
![]() .
.
Вследствие большого бокового сопротивления сваи погружение на второй заходке сильно замедлилось. Выход состоит в погружении сваи с опережающим забоем. Пересчитаем параметры на этот случай:
Р б2 = (377,2+2343,7)×5,02/(5,02+4,27) = 1470 кН;
Р 2 = 1,0×(1250+150)×0,558+1470 = 2251 кН;
Р в2 = (2251-435)/2,83 = 642 кН;
![]()
![]()
![]()
Заходка 3 - производят наращивание сваи еще одной секцией длиной 8 м. Проходят часть слоя 3 толщиной 8 м ( l 3 = 8 м), также с опережающим забоем.
В конце погружения реализуется полная несущая способность сваи-оболочки (см. выше):
Р б3 = 3710 кН; Р3 = 1,0×(1700+150)×0,558+3710 = 4742 кН;
G 3 = 450+135 = 585 кН;
Р в3 = (4742 - 585)/2,38 = 1747 кН;
![]()
![]()
А 3 = 1,15/585 = 0,002 м;
![]()
Знак «минус» в знаменателе показывает, что время погружения стремится к бесконечности, т.е. погружения не происходит. Таким образом, расчет подтверждает, что режимы с более высокими частотами менее эффективны для погружения оболочек, а погружающая способность гидровибропогружателей ниже, чем традиционных машин с электромеханическим низкочастотным приводом.
Проверим, что будет, если на заходке 3 производить погружение оболочки спаренным вибратором (см. рис. 20):
G 3 = 450+450 = 900 кН;
Р в3 = (4742-900)/2,38 = 1614 кН;
![]()
![]()
А 3 = 2×1,15/900 = 0,0026 м;
![]()
Полное (чистое) время погружения одной сваи-оболочки (при выполнении всех предусмотренных выше технологических мероприятий) равно
t п = 5,4+6,8+4,7 = 17 мин.
Заметим, что в общем времени t погр цикла погружения оболочки, определяемом по формуле ( 21), чистое время погружения составляет весьма незначительную часть, так как остальные компоненты формулы исчисляются часами. Тем не менее, изложенная выше методика прогнозирования вибропогружения свай играет важную роль. Она позволяет оценить погружающую способность вибраторов и проверить возможность применения различных технологических приемов, улучшающих процесс погружения.
5.3. Агрегаты для возведения фундаментов из буронабивных свай
Особенностью технологии работ по сооружению свай этого типа является монолитное подводное бетонирование свай непосредственно в грунте в проектном положении. Сначала в грунте тем или иным способом делают скважину (при необходимости с уширением), затем устанавливают в нее арматурный каркас и укладывают бетонную смесь (рис. 21).
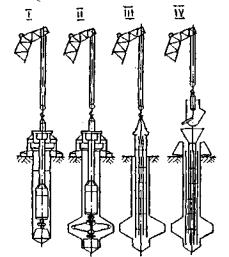
Рис. 21. Технологическая схема устройства буронабивных свай:
I - бурение скважины; II - разбуривание уширения; III - установка арматурного каркаса; IV - заполнение скважины бетонной смесью
Предложенный в 1899 году русским инженером Страуссом способ устройства буронабивных свай получил распространение преимущественно в зарубежных странах. Известно много разновидностей этого способа - «симплекс», «вибро», «стерн», «вит», «атлас», «франки» и др.
Скважины для свай в нескальных грунтах устраивают забивкой, впбропогружением, задавливанием инвентарных или оставляемых в грунте стальных обсадных труб с закрытым или открытым нижним концом. В связных грунтах бурить можно без обсадных труб, используя гидростатическое давление глинистого раствора пли воды зля преотвращенпя обрушения грунта в скважине. При этом применяют разное механическое бурильное оборудование, которое выбирается в зависимости от вида грунта (рис. 22, а-г). При устройстве обычных в мостостроении скважин диаметром 0,8 - 1,7 м и глубиной до 50 м используют открытые снизу инвентарные трубы, погружаемые задавливанием гидродомкратами (рис. 22, е). Для разбуривания уширеиии применяют вращающиеся уширители с раскрывающимися лопастями, режущими грунт, и с ковшовым буром (рис. 23, табл. 13). При строительстве опор на акватории буровой агрегат устанавливают на подмости (см. рис. 10).

Рис. 22. Виды бурильного инструмента и оборудования:
а - лопастной бур; б - шнековый бур; в - ковшовый бур; г - грейфер; д - ударное долото; е - обсадная труба; ж - шарошечное долото
Разработку скальных грунтов в скважинах производят ударным способом при помощи долота (рис. 22, д) или вращательным бурением шарошечным инструментом (рис. 22, ж). Долото подвешивают на канате к мачте агрегата ударно-канатного бурения и сбрасывают с высоты. Буровой шлам удаляют из скважины, промывая ее специальным устройством (рис. 24).
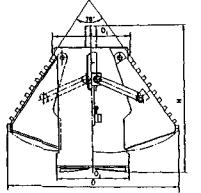
Рис. 23. Уширитель к бурильным машинам фирмы Kato (Япония)
Таблица 13
Техническая характеристика уширителей к бурильным машинам
|
Диаметр обсадной трубы, мм |
Диаметр уширемня D, мм |
Наружный диаметр D 1 , мм |
Высота H / Hmax мм |
Высота ковша Н1, мм |
Вместимость ковша, м3 |
Масса, кг |
|
Уширители отечественного производства |
||||||
|
1000/920 |
2650 |
800 |
4020/4780 |
1365 |
0,3 |
3170 |
|
1180/1100 |
2650 |
980 |
4020/4780 |
1365 |
0,55 |
1240 |
|
1500/1400 |
2650 |
1270 |
4040/4800 |
1380 |
1,0 |
3640 |
|
1680/1580 |
3500 |
1510 |
4040/4800 |
1380 |
1,7 |
4180 |
|
|
|
Уширители фирмы Kato (Япония) |
|
|
||
|
1000/920 |
2000 |
850 |
730 |
- |
- |
1200 |
|
1180/1100 |
2500 |
1050 |
930 |
- |
- |
1300 |
|
1480/1380 |
3000 |
1320 |
1200 |
- |
- |
2000 |
|
1680/1580 |
3500 |
1520 |
1400 |
- |
- |
2500 |
Бурение скважин шарошечным инструментом производят при помощи агрегатов с погружными забойными двигателями, оснащенных турбобурами или электробурами. Агрегаты, смонтированные на базе серийных турбобуров Т12РТ-240, которые используются в горной промышленности, позволяют производить разбуривание скважин диаметром до 1,3 м на глубину до 30 м. Агрегат с реактивно-турбинным буром РТБ2600 осуществляет проходку скважин диаметром 2,6-2,83 м неограниченной глубины (рис. 25). Агрегат состоит из четырех турбобуров, смонтированных на единой раме и снабженных трехшарошечными долотами, которые вращает с частотой около 600 об/мин реактивная струя воды. Забой скважины очищается от выбуренного грунта потоком жидкости, выходящей из долот, с прямой промывкой скважины и периодическим эрлиф-тированием.
Мощность турбобуров больше, чем мощность станков ударно-каначчого бурения. Поэтому РТБ целесообразно использовать при устройстве значительного числа скважин большого диаметра. Вместе с тем, бурильные агрегаты с турбобурами обладают низким к.п.д., требуют большого расхода чистой воды, имеют низкий крутящий момент на буровом инструменте. Агрегаты с погружным электрическим двигателем более эффективны, чем турбобуры.
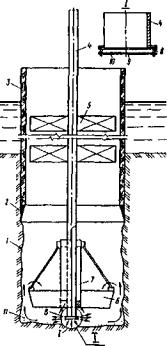
Рис. 24. Устройство для удаления бурового шлама из скважины:
1 - скважина в скальной породе; 2 - нож оболочки; 3 - железобетонная оболочка; 4 - водоподводящая труба; 5 - центратор трубы; 6 - шлакоприемный бункер; 7 - труба для создания кольцевого зазора; 8 - кольцевые щели; 9 - центральное отверстие; 10 - отражатель; 11 - буровой шлам
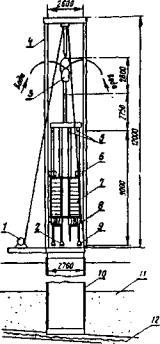
Рис. 25. Агрегат с реактивно-турбинным буром РТБ-2600;
1 - электролебедка; 2 - долото диаметром 750 мм; 3 - вертлюг; 4 - вышка; 5 - турбобуры; 6 - верхние центраторы; 7 - нригруз; 8 - нижние центраторы; 9 - долото диаметром 490 мм; 10 - оболочка; 11 - грунт; 12 - скальная порода
В частности, подвесной бурильный агрегат отечественного производства с четырехшпиндельным укороченным электробуром применяют для вращательного шарошечного бурения с промывкой вертикальных скважин диаметром 1,3 - 1,65 м глубиной до 56 м (рис. 26). Подводное бетонирование обычно производят способом вертикально перемещающейся трубы (ВПТ) [7], который, однако, не позволяет получать требуемые классы по прочности и водонепроницаемости и необходимое качество бетона буронабивных свай.
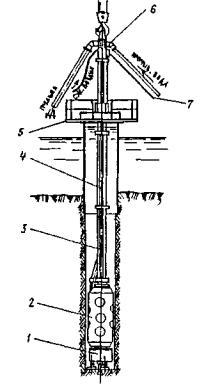
Рис. 26. Агрегат подвесной бурильный с четырехшпиндельным укороченным электробуром:
1 - планетарный редуктор с бурильными инструментами; 2 - центратор; 3 - переходник; 4 - бурильная штанга; 5 - реактивная рама; 6 - наголовник; 7 - токоподводящий кабель
Из-за этого возникает необходимость применения особых технологий. Неоднократно предпринимались попытки подводной укладки бетонной смеси с вибрированием. В последние годы отечественными инженерами разработан и применяется комплект бетонолитного оборудования с использованием виброштампа (рис. 27). При этом способе подача бетонной смеси по вертикальной бетонолитной трубе может производиться как из бункера, так и бетононасосом. По мере подачи бетонной смеси и проработки ее виброштампом обсадную трубу постепенно извлекают из скважины. Применение установки для укладки с вибрированием позволяет повысить прочность бетона сваи в 1,2-1,5 раза, а также несущую способность свай по грунту на 20-30%.
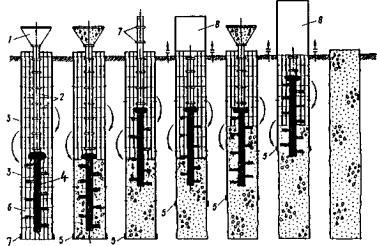
Рис. 27. Схема бетонированя скважин при помощи виброштампа:
1 - накопительный бункер; 2 и 3 - секции бетонолитной и инвентарной обсадной труб; 4 - виброштамп; 5 - режущая коронка обсадной трубы; 6 - арматурный каркас; 7 и 8 - демонтируемые звенья бетонолитной и обсадной труб
За рубежом, как правило, используют специальные буровые машины на гусеничном ходу. Все операции по бурению скважин производят одной машиной, оборудованной комплектом бурового инструмента для разных грунтов, уширителем, домкратной установкой для погружения и извлечения обсадных труб, бетононасосом для подачи бетона в скважину (рис. 28, табл. 14).
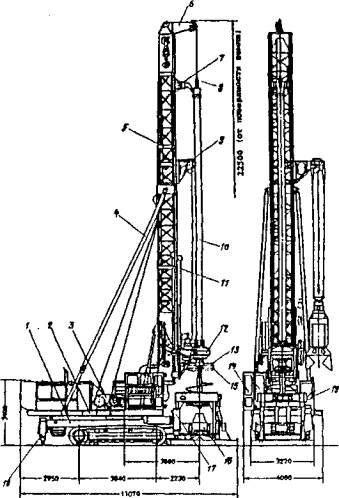
Рис. 28. Бурильные машины 50THC-VS III и 50THC- V SV фирмы Ka t o (Япония);
1 - ходовая часть; 2 - поворотная платформа; 3 - лебедки; 4 - растяжки; 5 - мачта; 6 - оголовок мачты; 7 - люнст штанги; 8 - вертлюг; 9 - гусек мачты; 10 - бурильная штанга; 11 - гидроцилиндр подачи вращателя; 12 - вращатель; 13 - кольцо штанги; 14 - кабина; 15 - направляющее кольцо штанги; 16 - механизм качания обсадной трубы; 17, 18 - передние и задние выносные опоры; 19 - вторая кабина
Таблица 14
Техническая характеристика буровых машин зарубежного производства
|
Показатели |
Tellbor фирмы Ba de Германия |
BG -14 фирмы Bauer Германия |
В 220 фирмы Casa-grande Италия |
PF 1200- YSII фирмы Ka t o Япония |
30 TH С-VS фирмы K а to Япония |
50 TH С-VSIII фирмы Ka t o Япония |
|
Базовая машина |
навесное оборудование на кран |
экскаватор R962T Liebherr |
специальная гусеничная |
специальная гусеничная |
экскаватор Комацу-Каминдз |
специальная гусеничная |
|
Метод бурения |
вращательный, ударный |
вращательный |
вращательный |
вращательный |
ударный |
вращательный, ударный |
|
Диаметр скважины, м |
0,9-2,0 |
1,2; 1,5; 1,8 |
1,5; 2,5 |
1; 1,2 |
1,2; 1,5; 1,7 |
1,5; 1,7 |
|
Диаметр уширения, м |
- |
- |
- |
2,5 |
- |
3; 3,5 |
|
Глубина бурения, м |
40 |
60 |
68 |
24; 20 |
40; 30; 24 |
50: 40 |
|
Максимальный наклон оси скважины |
- |
- |
- |
5:1 |
- |
5:1 |
|
Габариты, м: |
|
|
|
|
|
|
|
- высота |
- |
20,35 |
21,55 |
22,5 |
13,3 |
22,5 |
|
- длина |
- |
7,725 |
9,35 |
10,65 |
9,45 |
11,07 |
|
- ширина |
- |
3,8 |
3,0 |
4,06 |
3,2 |
4,06 |
|
Ходовая часть, м: |
|
|
|
|
|
|
|
- колея |
- |
3,05 |
4,4 |
2,62 |
3,2 |
2,62 |
|
- ширина башмака гусеницы |
- |
0,75 |
0,8 |
0,6 |
0,6 |
0,6 |
|
- база |
- |
4,4 |
5,398 |
3,94 |
3,524 |
3,94 |
|
Масса, т |
4,9-17,0 |
80 |
70 |
52 |
39 |
67 |
В СССР (России), начиная с работ проф. Е.Л. Хлебникова 1955 - 1957 гг., применяют в основном навесное оборудование на копры и гусеничные машины, а также легкие бурильно-крановые машины (рис. 29, табл. 15).
Заметим, что, хотя по техническим возможностям отечественные буровые машины вполне удовлетворительны, они существенно проигрывают мировым образцам в надежности.
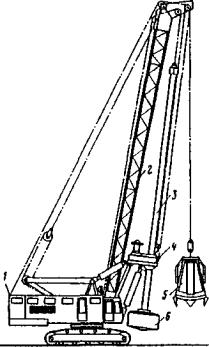
Рис. 29. Навесное оборудование МБС-1,7А:
1 - кран-экскаватор; 2 - стрела; 3 - телескопическая штанга; 4 - ротор с электроприводом; 5 - грейфер; 6 - ковшовый бур
Таблица 15
Техническая характеристика буровых машин отечественного производства
|
Показатели |
МБНА-1М |
МБУ-1,2 |
МБС-1,7А |
БС-2 |
БМ-3061 |
БМ-4001 |
|
Базовая машина |
автомобиль КРАЗ-250К |
кран-экскаватор Э-1258 |
гусеничный кран ДЭК-251 |
специальная гусеничная |
экскаватор ЭО-5123 |
экскаватор ЭО-6123-1 |
|
Метод бурения |
вращательный, ударный |
вращательный |
вращательным, ударный |
ударно-канатный |
вращательный, ударный |
вращательный, ударный |
|
Диаметр скважины, м |
1,0 |
1,2 |
1,3; 1,7 |
1,0 |
0,6-1,5 |
1,2; 1,5; 1,7 |
|
Диаметр уширения, м |
- |
- |
3,5 |
- |
2,5; 3,5 |
2,65; 3,5 |
|
Глубина бурения, м |
20 |
32 |
28; 30,5 |
200 |
15-30 |
40; 30; 24 |
|
Пред. наклон оси скважины |
5:1 |
- |
- |
- |
- |
5:1 |
|
Габариты, м: |
|
|
|
|
|
|
|
- высота |
16,09 |
20 |
24,7 |
15,05 |
19,7 |
24,85 |
|
- длина |
11,6 |
10,17 |
12,44 |
7,24 |
9,0 |
10,46 |
|
- ширина |
4,85 |
3,8 |
4,76 |
3,9 |
3,08; 5,2 |
3,8 |
|
Ходовая часть, м: |
|
|
|
|
|
|
|
- колея |
- |
3,1 |
3,73 |
2,6 |
2,51 |
3,1 |
|
- ширина башмака гусеницы |
- |
0,7 |
0,625 |
0,42 |
0,63 |
0,7 |
|
- база |
- |
3,7 |
4,186 |
3,55 |
3,12 |
3,7 |
|
Масса, т |
29 |
62 |
60 |
31 |
67 |
70 |
Поэтому сейчас преимущественное распространение получила буровая техника японских фирм Kato (PF1200 и 50ТНС), Sanva Kisai (буро-шнековые машины D120H-PY и др.), Kensetsu Kikai Tesa (виброгрейферы). Также популярны машины немецких фирм Bauer, Bade, итальянские Kasagrande, финские Junttan.
При подводном бетонировании скважин способом ВПТ в качестве ведущей машины, выступающей в партнерстве с буровым агрегатом, применяют стреловой самоходный кран с бункером или бетононасос.
5.4. Вспомогательное оборудование
При сооружении свайных фундаментов в качестве вспомогательного оборудования применяют устройства для погружения и извлечения шпунта; для облегчения погружения свай в грунт; для срезки голов свай; для откачки воды из котлованов, водопонижения и др.
Устройства для погружения и извлечения шпунта бывают двух основных типов: вибромолоты и домкратные установки.
Вибромолоты основаны на принципе преобразования вибрационных воздействий в ударные (рис. 30). При синхронном вращении эксцентриков в разные стороны возникает направленная по оси погружаемого элемента периодическая вынуждающая сила, под действием которой ударная часть колеблется на пружинах, нанося удары по наковальне. Ударные импульсы передаются погружаемому элементу через наголовник. При извлечении шпунта используются вибрация и направленная вверх вынуждающая сила, создаваемые вращением эксцентриков в сторону, обратную погружению.
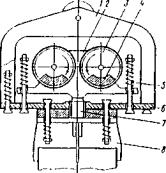
Рис. 30. Вибромолот:
1 - рама; 2 - ударная часть; 3 - электромотор; 4 - эксцентрик; 5 - пружина; 6 - плита; 7 - наковальня; 8 - наголовник
Вибромолоты характеризуются теми же параметрами, что и вибропогружатели, а также энергией и частотой ударов. Энергия удара (Дж)
Е = wv 2 /2(1-R)], (22)
где m - масса ударной части молота, кг; v - ударная скорость вибромолота, м/с ( v ≤ 2 м/с); R - условный коэффициент восстановления скорости при ударе (-1 ≤ R ≤ +1).
За рубежом выпускают вибромолоты (как навесное оборудование к гидравлическим экскаваторам) с электроприводом (модель PE26.02) и с гидроприводом (модель HVB40/26). Характеристики названных моделей приведены в табл. 16. Гидровибромолоты более компактны, не потребляют электроэнергии, но менее мощные.
Таблица 16
Техническая характеристика вибромолотов для погружения и извлечения шпунта
|
Покатели |
МШ-2М |
В 11/44 |
В-402 |
СП-83 |
РЕ 26.02 |
HVB 40/26 |
|
отечественного производства |
фирмы D?nkers |
|||||
|
Статически момент |
0,091; |
0,08; 0,1; |
|
|
|
|
|
массы дебалансов, кН·м |
0,113 |
0,11 |
0,11 |
0,1 |
0,07 |
0,054 |
|
Частота вращения дебалансов, об/мин |
970 |
1475 |
1300 |
1000 |
1630 |
2600 |
|
Вынуждающая сила макс, кН |
94; 117 |
90-260 |
270 |
240 |
260 |
400 |
|
Мощность электродвигателя кВт |
2×30 |
2×22 |
55 |
2×17 |
100 |
- |
|
Масса вибромашины, т |
4,1 |
2,5 |
3,0 |
4,9 |
1,33 |
0,93 |
Погружение и извлечение шпунта вибромолотами связаны с неизбежными сотрясениями грунта, которые крайне нежелательны по экологическим соображениям и недопустимы при работе вблизи существующих сооружений. Гидравлический агрегат Tiewoo d английской фирмы BSP работает почти бесшумно, используя принцип статического группового задавливания металлических шпунтовых свай, (рис. 31). Длина хода штоков гидродомкратов - 0,75 м.
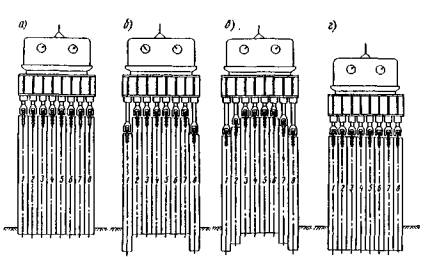
Рис. 31. Схема работы агрегата Tiewood по задавлнваншо стального шпунта (1 - 8 - шпуптины):
а-г - схемы производства работ
Эффективным средством улучшения погружения свай и свай-оболочек является подмыв водой. Для этого применяют высоконапорные иглы и многоступенчатые центробежные насосы типа ЦНС с расходом воды до 5 м3/мин и давлением до 33 МПа. В сваях-оболочках малого диаметра подмывная труба вставляется внутрь («центральный подмыв» - рис. 32).
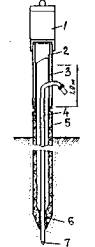
Рис. 32. Схема погружения сваи-оболочки с «центральным подмывом»:
1 - молот; 2 - наголовник; 3 - прорезь; 4 - подмывная труба; 5 - свая-оболочка; 6 - центральное отверстие в наконечнике сваи; 7 - высоконапорная игла
На время ее работы погружение сваи прекращают, включают высоконапорную иглу, подмывную трубу опускают в прорези наголовника, так что она выходит вниз из наконечника сваи. По окончании подмыва трубу втягивают обратно. При подмыве оболочек большого диаметра используют пакет подмывных труб, соединенныех сверху коллектором (рис. 33). На время подмыва погружение оболочки прекращают, включают подмывные иглы, пакет погружается в размываемый грунт. По окончании подмыва пакет труб краном извлекают на поверхность.
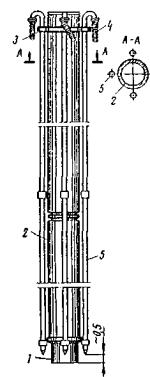
Рис. 33. Схема погружения сваи-оболочки с наружным подмывом:
1 - нож; 2 - свал-оболочка; 3 - коллектор; 4 - резиновые шланги; 5 - пакет подмывных труб
Работы по срезке голов свай на сегодняшний день механизированы еще недостаточно. Для этих целей может применяться навесное гидрооборудование («ножницы») на краны. Например, гидрооборудование на рис. 34 предназначено для разрушения призматических свай сечением до 45×45 см и свай-оболочек диаметром до 0,6 м. Усилие, развиваемое гидроцилиндром, составляет 1100 кН, масса комплекта оборудования - 2,4 т.
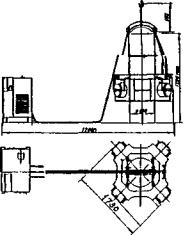
Рис. 34. Комплект гидрооборудопания для разрушения голов свай
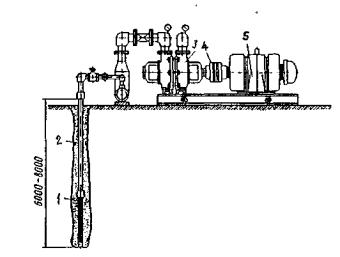
Рис. 35. Иглофильтровая установка:
1 - иглофильтр; 2 - всасывающая труба; 3 - центробежный насос; 4 - муфта: 5 - электродвигатель
При небольшом объеме притока воды в котлован со шпунтовым ограждением используют погружные центробежные моноблочные насосы типа ГНОМ производительностью 10-40 м3/ч. При значительном притоке воды в котлован используют центробежные самовсасывающие одноступенчатые насосы типа НЦС производительностью 18 -130 м3/ч, которыми можно откачивать и загрязненную воду.
При необходимости понижения уровня грунтовых вод в зоне котлована в несвязных грунтах применяют иглофильтровые установки (см. рис. 35).
5.5. Машины для фундаментов на вечномерзлых грунтах
При строительстве фундамента на вечномерзлых грунтах (ВМГ) их используют по одному из двух основных принципов: по принципу I, предусматривающему сохранение грунта в мерзлом состоянии весь период строительства и эксплуатации сооружения; по принципу II, допускающему деградацию (частичное или полное размерзание) вечной мерзлоты. Принятый принцип определяет выбор конструкции фундамента, технологию и механизацию его возведения.
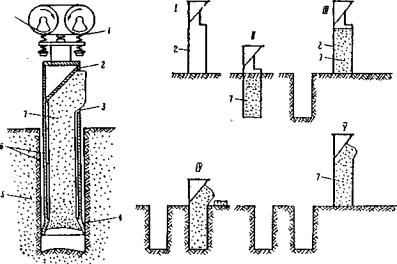
Рис. 36. Схема разработки скважин трубчатыми лидерами (I-V - последовательность операций):
1 - вибромолот; 2 - лидер; 3 - отверстие для выхода грунта в лидерной скважине; 4 - наконечник лидера; 5 - мерзлый грунт; 6 - зазоры между мерзлым грунтом и лидером; 7 - грунтовый керн
Из-за достаточно низких физико-механических характеристик ВМГ при использовании обоих принципов, как правило, устраивают свайные фундаменты. В случае применения принципа I сваи погружают забивкой в предварительно пробуренные лидерные скважины меньшего диаметра или же устанавливают готовые свайные элементы (буроопускные столбы) в скважины большего диаметра, заполняя полость различными смесями (цементно-песчаным раствором, пескоцементом и др.).
Чтобы образовать лидерные скважины, используют обычную буровую технику для скальных пород (см. п. 5.3), а также специальные трубчатые лидеры (рис. 36), виброгрейферы, виброударные машины на базе тракторов, оборудованные вибромолотами (рис. 37) [23].

Рис. 37. Виброударная машина для разработки скважин в мерзлых грунтах
При использовании принципа II в ряде случаев производят предварительное оттаивание ВМГ с последующим сооружением свайного фундамента обычным способом. Для оттаивания грунта применяют комплект оборудования, включающий источник пара, паропровод, распределитель, паровые иглы (рис. 38, 39). В качестве источника пара используют котлы с поверхностью нагрева от 8 до 32 м2.
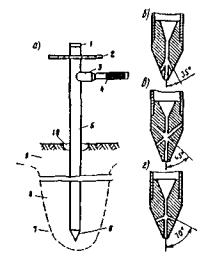
Рис. 38. Паровая игла (а) и наконечники (б-г):
1 - заглушка; 2 - рукоятка; 3 - тройник; 4 - гибкий шланг; 5 - труба; 6 - наконечник; 7 - вечномерзлый грунт; 8 - оттаянный грунт; 9 - сезонномерзлый грунт; 10 - лунка
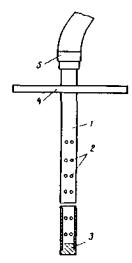
Рис. 39. Перфорированная паровая игла:
1 - труба; 2 - отверстия; 3 - заглушка; 4 - рукоятка; 5 - гибкий шланг
На одну иглу требуется обеспечить 4-5 м2 поверхности нагрева котла. Паровые иглы изготавливают из труб диаметром 25 - 30 мм и длиной до 8 м.
6. ГРУЗОПОДЪЕМНЫЕ МАШИНЫ
Для отечественного мостостроения характерно создание и широкое применение наряду с общестроительными кранами различных грузоподъемных кранов специального назначения. Это объясняется особенностями технологии мостовых работ и неблагоприятными условиями для применения в ряде случаев общестроительных кранов. Основные типы и марки современных кранов рассмотрены в [10] - [14] и др. В данном разделе приводятся дополнительные сведения о грузоподъемных машинах специального назначения, которые обычно малодоступны студентам.
6.1. Типы грузоподъемных кранов
По области применения и эксплуатационным условиям краны для строительства мостов можно разделить на три группы [24].
Первую группу составляют стреловые самоходные полноповоротные краны общего назначения на спецшасси, автомобильном, пневмоколесном, гусеничном и железнодорожном ходу. В отдельных случаях используют также башенные краны (приставные, самоподъемные и передвижные). Краны этой группы применяют наиболее широко. Их особенности - автономность работы, быстрота и низкая трудоемкость приведения из транспортного в рабочее положение, но сравнительно высокая стоимость.
Во вторую группу входят специализированные универсальные краны: козловые и жестконогие деррик-краны. Их отличительные особенности: более узкая область применения, питание двигателей от внешних источников, меньшая стоимость, но и повышенные трудозатраты, а также стоимость приведения в рабочее положение.
Третья группа - специальные краны, предназначенные для производства работ в особых условиях. К ним относятся консольные, консольно-шлюзовые и кабельные краны, специальные монтажные агрегаты.
Особую группу составляют плавучие краны - непременный атрибут строительства любого большого моста. Сюда же можно отнести краны на самоподъемных платформах и некоторые другие.
6.2. Стреловые самоходные краны общего назначения
Стреловые самоходные краны являются одним из наиболее универсальных средств механизации строительно-монтажных работ. Многообразие существующих конструкций и типоразмеров кранов дает возможность рационального выбора крана, наиболее соответствующего условиям его работы в конкретных условиях.
Основными факторами, определяющими грузоподъемные возможности стрелового крана, являются устойчивость положения крана при действии опрокидывающего грузового момента и высота подъема крюка крана относительно уровня его стоянки. Влияние указанных факторов графически представляется в виде номограмм грузовысотных характеристик, т.е. совмещенных графиков зависимостей G = f 1 (L) и Н = f2(L), где G - грузоподъемность крана, т; H - высота подъема крюка, м; L - вылет крюка, м (рис. 40). Грузовысотные характеристики даны в справочниках для каждого крана при работе его как без выносных опор (аутригеров), так и на них, для разных длин стрелы l с крана.
Кривые высоты подъема груза заданного габарита В рассчитаны по приведенной ниже методике, пригодной для любого стрелового крана.
Высота подъема верхней кромки груза
 (23)
(23)
где l - расчетная длина стрелы крана; L - вылет крюка; с - расстояние от оси вращения поворотной платформы крана до оси пяты стрелы; В - габарит груза; f - толщина стрелы в месте предполагаемого соприкосновения с грузом; k - допустимый зазор между стрелой крана и грузом; h - расстояние от опорной поверхности крана до оси пяты стрелы.
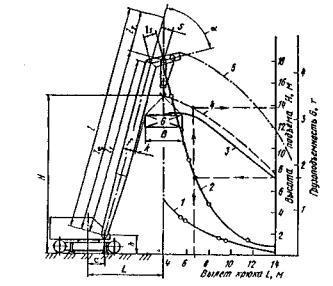
Рис. 40. Номограмма грузовысотных характеристик стрелового крана:
1 - кривая грузоподъемности при работе крана без выносных опор; 2 - то же, на выносных опорах; 3 - кривая высоты подъема верхней кромки груза данного габарита; 4 - кривая высоты подъема крюка; 5 - дуга, описываемая концом стрелы
Расчетная длина стрелы крана складывается из следующих составляющих (см. рис. 40):
l = l с +l2 = l1+l2+l3 cos α, (24)
 (25)
(25)
где l с = l 1 + l 3 cos α - длина стрелы (расстояние между осью пяты и осью верхнего блока грузового полиспаста основного подъема); S = l 3 sin α - расстояние от оси блока полиспаста до продленной оси стрелы.
Определение высоты подъема груза по грузовысотным характеристикам производится следующим образом:
1) зная массу груза G, находим соответствующую точку на кривой грузоподъемности (см. рис. 40, график 2);
2) проводим вертикальную линию до пересечения с осью абсцисс и определяем вылет стрелы L, соответствующий грузоподъемности;
3) продолжаем вертикаль до пересечения с кривой, соответствующей высоте подъема крюка (см. рис. 40, график 4);
4) проводим горизонталь до пересечения с ординатой высоты подъема крюка и определяем максимальную высоту подъема H , соответствующую вылету стрелы L.
Если задан габарит груза В, аналогично можно поступить с определением максимальной высоты подъема верхней кромки груза (см. рис. 40, график 3). При этом в задаче фигурируют толщина стрелы крана f и допустимый зазор между стрелой и грузом k , которые в расчетах принимают приближенно по 1,0 м.
Технолог-мостостроитель занимается решением задачи о подборе грузоподъемного крана весьма часто. Причем данная задача может решаться по крайней мере в двух постановках:
1. Для заданных технологических условий, т.е. H 3 , G3, В и параметрах строповочных устройств, необходимо определить необходимые вылет L, длину стрелы l с и подобрать по справочнику марку крана.
2. Проверить возможности конкретного крана по установке грузах параметрами G3 и В на высоту Н3.
В любом случае должны соблюдаться условия
G(L) ≥ G3; (26)
H ( L ) ≥ Н3; (27)
k ≥ 1 м; (28)
L min ≤ L ≤ L max ; (29)
H ≤ H max , (30)
где L min , L max - соответственно минимально и максимально допустимый вылет стрелы по техническим характеристикам крана; H m ах - максимально допустимая высота подъема крюка.
Решение задачи типа 1 осложняется тем, что вокруг точки, отстоящей на расстоянии k+f/2 от крайней точки груза (конструкции), может быть описано под разными углами к горизонту бесчисленное множество стрел с параметрами L и l ( l с ). Причем уменьшение вылета L , при котором увеличивается грузоподъемность G(L), приводит к возрастанию длины стрелы l , а значит, к обратному эффекту - снижению грузоподъемности крана. Как видим, эти два искомых параметра одновременно присутствуют в выражениях ( 23) - ( 25), поэтому аналитически выразить один из них невозможно.
Во многих учебниках и справочниках приводятся формулы для определения расчетных параметров подбираемого крана. Но в силу изложенных выше особенностей, практический расчет по формулам вызывает затруднения и приводит к неверным результатам. Поэтому более просто и реально решается задача 2, причем лучше всего ее решать графическим построением схемы монтажа в масштабе.
При решении этой задачи известны: масса груза со строповочными приспособлениями G = G3, габарит груза В и требуемая высота его подъема Н = H 3 , (см. рис. 40). Берем конкретный кран и принимаем для начала длину его стрелы приближенно (1,3...1,5) H 3 . Выбираем по справочнику ближайшую (в большую сторону) длину стрелы l ( lc ).
Далее производим графические построения: из точки, отстоящей на расстоянии k+f/2 от крайней точки груза (конструкции), проводим наклонную прямую, добиваясь того, чтобы между точкой ее пересечения с уровнем расположения шарнира пяты стрелы h и точкой пересечения с осью подвешивания груза длина отрезка была равна длине стрелы. При этом стремимся достичь минимума вылета стрелы L. Если стрела не укладывается между указанными точками, то либо k > 1 м, что вполне приемлемо, либо можно уменьшить длину стрелы. Если же наоборот - стрела «режет» груз, необходимо увеличить ее длину.
При полученном таким образом вылете стрелы L по грузовысот-ным характеристикам крана проверяем условия (26) - (30). При несоблюдении хотя бы одного из них кран «не проходит», необходимо выбрать из числа имеющихся кранов приемлемый, повторив заново всю описанную схему решения задачи.
Пример 4. Проверим возможность установки балки пролетного строения массой G3 = 12 т на опоры путепровода пневмоколесным краном КС-6362 грузоподъемностью 40 т.
Исходные данные (рис. 41): h0 = 7 м; h 3 = 1 м; hk = 2 м; h с = 3 м; B = 4 м; h = 1,5 м; с = 2,5 м; d ≥ 0,5+1 = 1,5 м.
Решение: определяем заданную высоту подъема крюка
Н 3 = h 0 + h 3 + h k + h c = 7+1+2+3 = 13 м.
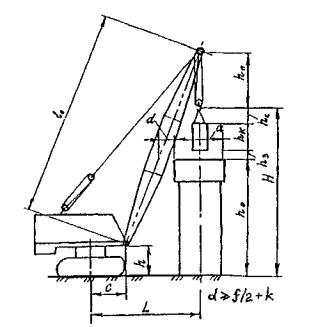
Рис. 41. Схема монтажа конструкции (к примеру 4)
Необходимая длина стрелы l с ≈ 1,5×13 = 19,5 м. По справочнику [24] принимаем кран с длиной стрелы 20 м (с. 57, рис. 3.26).
Путем графического построения при выполнении условия ( 28) получен минимально возможный вылет стрелы L = 9 м. Условие ( 29) соблюдается: L mi n = 5,5 м ≤ L ≤ L max = 17 м.
По грузовысотным характеристикам (рис. 3.27, кривая 11) G( L ) = 13 т, т.е. условие ( 26) соблюдено. По кривой 10 - Н(L) = 19 м > Н3 = 13 м, т.е. выполняются и условия ( 27), ( 30).
Таким образом, пневмоколесный кран КС-6362 с длиной стрелы 20 м может выполнить требуемую монтажную операцию.
В России и странах ближнего зарубежья серийно выпускаются автомобильные краны грузоподъемностью 4-16 т, пневмоколесные - 16-100 т, гусеничные - 16-150 т, на спецшасси автомобильного типа - 25-160 т. Имеются опытные образцы кранов на спецшасси грузоподъемностью до 250 т. Довольно широко применяются также краны японских фирм на специальном шасси нормальной базы фирмы Kato грузоподъемностью 16-120 т, гусеничные краны фирм Hittachi и Sumitomo, германские краны Liebherr, финские Lokomo - грузоподъемностью до 250 т. Известны случаи осуществления уникальных монтажных операций кранами на спецшасси грузоподъемностью до 650 т.
Таблица 17
Техническая характеристика железнодорожных кранов типа ЕДК (Германия)
|
Характеристики |
Марка крана ЕДК-... |
||||||
|
25 |
50 |
100 |
300 |
500 |
1000 |
2000 |
|
|
Грузоподъемность, т: |
|
|
|
|
|
|
|
|
- на основном крюке |
25 |
50 |
100 |
60 |
80 |
125 |
250 |
|
- на вспомогательном крюке |
10 |
- |
14 |
- |
- |
20 |
90 |
|
Вылет стрелы, м: |
|
|
|
|
|
|
|
|
- до основного крюка |
5-13 |
5,5-12 |
6-21,5 |
5,5-14 |
6,25-21 |
7-25 |
8-19 |
|
- до вспомогательного крюка |
8-16 |
- |
7-25 |
- |
- |
8,2-28 |
9,25-22 |
|
Высота подьема над головкой рельса, м: |
|
|
|
|
|
|
|
|
- главного крюка |
3,5-9 |
6-10,3 |
5,5-18 |
7,5-13 |
6-18 |
9-22 |
4-15 |
|
- вспомогательного крюка |
3-12 |
- |
6,5-22 |
- |
- |
12-26 |
5-18 |
|
Основные размеры, мм: |
|
|
|
|
|
|
|
|
- длина основной рамы |
13620 |
10770 |
11170 |
10850 |
11840 |
17500 |
15300 |
|
- длина с платформой |
- |
- |
43700 |
24850 |
29840 |
41940 |
40900 |
|
- ширина |
3150 |
3150 |
3150 |
3130 |
3100 |
3130 |
3150 |
|
- высота при опушенной стреле |
4620 |
4620 |
4650 |
4650 |
4250 |
4620 |
4630 |
|
Максимальная масса крана, т |
106 |
97 |
173 |
103 |
115 |
222 |
259 |
При монтаже пролетных строений железнодорожных мостов и строительстве путепроводов через железнодорожные пути эффективны краны большой грузоподъемности на железнодорожном ходу. Для этих монтажных операций на сети железных дорог России применяют в основном семейство железнодорожных дизель-электрических стреловых кранов типа ЕДК, выпускаемых в Германии (табл. 17). Наиболее часто используют на монтаже пролетных строений краны ЕДК-500, ЕДК-1000 и ЕДК-2000 (рис. 42). Краны имеют по четыре откидных аутригера с гидравлическими домкратами, под которые при монтаже тяжелых конструкций устраивают свайные опоры.
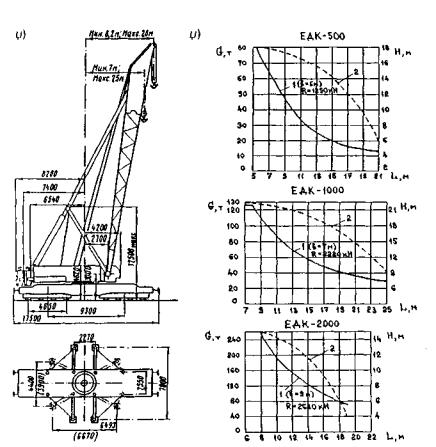
Рис. 42. Железнодорожный кран ЕДК-1000 грузоподъемностью 125 т (а) и грузовысотные характеристики кранов ЕДК (б):
1 - график G = f 1 ,( L ) для главного подъема при работе па выносных опорах с максимальной базой b ; 2 - график Н = f 2 (L) для главного подъема; R - максимальная сила давления аутригера на опору
6.3. Специализированные универсальные краны
В промышленности, строительстве и на транспорте применяется широкий класс козловых кранов, предназначенных в основном для погрузочно-разгрузочных работ на складах. Но это обычно краны невысокой грузоподъемности (5-15 т). Поэтому для строительства мостов еще в 1950-х гг. были созданы специальные козловые краны К-451, К-451М и К-651 грузоподъемностью 45 т и 65 т, которые помимо обслуживания полигонов, баз, складов могут применяться и в технологических целях - для сооружения опор и монтажа пролетных строений с земли и эстакад.
В отличие от стреловых кранов жестконогие деррик-краны - несамоходные и неполноповоротные [24], просты в устройстве и неприхотливы в эксплуатации. Кроме того, их собственный вес невелик. В настоящее время применяют краны отечественного производства УМК-2М, ДК-25-3С, ДК-40/10 грузоподъемностью 25 т и 40 т - для навесного монтажа стальных пролетных строений. Также используют кран МДК-63 грузоподъемностью 63 т, обычно устанавливаемый на плашкоуты (см. п. 6.4). Кроме того, деррик-краны, установленные на временные опоры, могут обслуживать причалы и склады на строительной площадке.
6.4. Специальные краны и монтажные агрегаты
Для строительства мостов созданы и применяются следующие серии отечественных специальных кранов.
Консольные краны. Железнодорожные консольные краны марок ПВК-70, ГЭК-80, ГЭПК-130У предназначены для установки на опоры цельнопролетных или укрупненных блоков пролетных строений железнодорожных мостов длиной до 45 м (см. [24]). Недостаток кранов ПВК-70 и ГЭК-80 состоит в том, что они неиоворотиы, т.е. могут устанавливать блок пролетного строения только по оси пути. Поэтому в настоящее время применяется только кран ГЭПК-130У. Но его недостатками являются: большой собственный вес; нагрузка на ось в рабочем положении до 400 кН и, в связи с этим, повышенные требования к подготовке пути; необходимость в ряде случаев устройства предмостовых тупиков.
Кроме того для монтажа балочных пролетных строений длиной до 34,2 м, массой до 52,5 т и блоков опор может применяться облегченный сборно-разборный консольный кран СРК-НЛ-50 (рис. 43). Собственная масса крана составляет 54 т, рабочая нагрузка на ось - не более 200 кН.
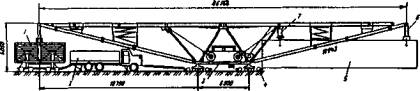
Рис. 43. Кран консольный сборно-разборный СРК-НЛ-50:
1 - противовес; 2 - автомобильный тягач на комбинированном ходу; 3 - платформа крана; 4 - ходовая тележка; 5 - пролетное строение; 6, 7 - соответственно главный и вспомогательный полиспасты
Консольно-шлюзовые краны. В отличие от консольных кранов консольно-шлюзовые краны в процессе работы занимают стационарное положение вдоль моста, будучи установлены над опорами. За счет этого они не оказывают значительных воздействий на путь. Созданный новый монтажный комплекс ЖШ-110 для пролетных строений железнодорожных мостов, включающий консольно-шлюзовой кран, лишен основных недостатков консольных кранов (см. [24]). Помимо крана в состав комплекса входит кран-перегружатель ПЖ-63 и транспортные тележки с мотовозом, обеспечивающие механизацию всего транспортно-монтажного процесса.
Ранее были созданы и широко применялись различные консоль-но-шлюзовые краны для монтажа железобетонных балок и блоков автодорожных мостов. В результате многолетнего использования и модернизации кранов выделились два параметрических ряда кранов:
краны КШМ-35, КШМ-40, КШМ-63, МКШ-35, МКШ-40, MКШ-63 - для монтажа цельнопролетных балок длиной 21, 24, 33 м;
МСШК-2×50, МСШК-2×60 и др. - для навесного монтажа поперечно-члененных коробчатых блочных пролетных строений.
Консольно-шлюзовые краны распространены и за рубежом, где их применяют в единичном исполнении для определенных конструкций пролетных строений.
При строительстве мостов с небольшими пролетами находят применение агрегаты, совмещающие в себе функции консольно-шлюзового крана, сваебойной и монтажной установки. Например, агрегат АМК-15 предназначен для забивки свай, установки насадок опор и балок пролетных строений длиной до 15 м и массой до 26 т (рис. 44). Основой агрегата является консольная стрела, заимствованная у крана КШМ-63, и копровая стрела - от копра СП-49В под дизель-молот для свай массой до 6 т, длиной до 16 м. Достоинством такого агрегата является работа «пионерным» способом, т.е. с готовой части моста, что не требует вспомогательных устройств.
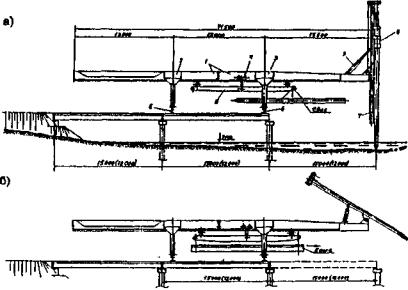
Рис.44. Схема строительства моста агрегатом АМК-15:
а - забивка свай; б - монтаж пролетных строений; 1 - балка двухсекционная; 2, 3 - опоры соответственно задняя и передняя; 4 - тележка грузовая грузоподъемностью 31,5 т; 5 - траверса грузовая; 6 - путь катания; 7 - копровая стрела; 8 - дизель-молот; 9 - гидроцилиндр
Кабельные краны. Монтажные агрегаты этого типа в мостостроении применяют эпизодически, в основном для строительства виадуков через глубокие ущелья и овраги. Существует целый ряд проектов таких кранов различной грузоподъемности [24].
Специальные монтажные агрегаты. Специальное монтажное оборудование создается, как правило, для единичных потребностей возведения уникальных конструкций. Выпускаемое в единственном экземпляре, это оборудование имеет высокую стоимость в сравнении с серийными общестроительными кранами, поэтому при малых объемах специальных монтажных работ оно становится невыгодным. В таких случаях стремятся приспособить общестроительные краны, но если это невозможно, применение специальных агрегатов становится все же неизбежным.
В процессе типизации, создания гибких технологий машины этого типа также унифицируют. В качестве примеров можно привести специальные агрегаты МА-65 для навесного монтажа сборных железобетонных поперечно-члененных пролетных строений автодорожных мостов, агрегаты МАС-5 и МАС-16 для навесного монтажа стальных решетчатых пролетных строений железнодорожных мостов и др. (см. [24]).
6.5. Плавучие краны
На строительстве мостов плавучими кранами выполняются разнообразные работы: погрузочно-разгрузочные, дноуглубительные, вспомогательные, сооружение русловых опор, монтаж пролетных строений.
Используют плавучие краны следующих видов: 1 - речные и морские самоходные полноповоротные и неповоротные краны; 2 - специализированные сборно-разборные краны; 3 - сухопутные краны различного типа, установленные на плавсредствах.
Самоходные речные и морские краны. Плавучие краны общего назначения выпускаются серийно для производства различного рода портовых работ. Мостостроители привлекают эти краны к выполнению работ по сооружению опор (для этого, как правило, достаточна грузоподъемность крана от 5 до 16 т) и монтажу пролетных строений кранами высокой грузоподъемности - до 1000 т и более (табл. 18, рис. 45- 50).
Таблица 18
Техническая характеристика речных и морских плавучих кранов
|
Характеристики |
Марка крана |
|||||
|
КПЛ-5/30 |
«Ганц» - 16/30 |
«Черноморец» |
«Севастополец» |
«Богатырь» |
«Витязь» |
|
|
Грузоподъемность, т: |
|
|
|
|
|
|
|
- главного подъема |
5 |
16 |
100 |
140 |
300 |
1000 |
|
- вспомогательного подъема |
- |
5 |
25 |
32 |
100 |
200 |
|
Вылет стрелы, м: |
|
|
|
|
|
|
|
- минимальным |
9 |
9 |
20 |
13 |
15 |
12 |
|
- максимальным |
30 |
30 |
40 |
36,5 |
26,7 |
20 |
|
Высота подъема крюка над палубой, м, не менее |
17 |
21 |
28,5 |
28 |
36,5 |
32,3 |
|
Глубина опускания крюка ниже палубы, м, не менее |
13 |
20 |
- |
- |
- |
- |
|
Размеры понтона, м: |
|
|
|
|
|
|
|
- длина |
28,6 |
32 |
40 |
46,8 |
54 |
80,4 |
|
- ширина |
12,18 |
15,6 |
20 |
21,6 |
25,2 |
25,6 |
|
- высота борта |
2,6 |
2,4 |
3,4 |
4,0 |
4,5 |
7,75 |
|
Осадка понтона, м |
1,13 |
1,5 |
2,0 |
2,6 |
2,8 |
4,4 |
|
Водоизмещение понтона, т |
335 |
634 |
950 |
1495 |
2112 |
4718 |
|
Масса груза, перевозимого на палубе, т |
- |
- |
300 |
- |
900 |
- |
|
Численность экипажа, чел. |
10 |
10 |
20 |
20 |
20 |
18 |
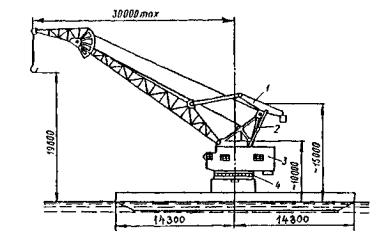
Рис. 45. Плавучий кран КПЛ-5/30:
1 - коромысло и противовес стрелы; 2 - тяга изменения вылета стрелы; 3 - машинное отделение с кабиной управления; 4 - поворотный механизм
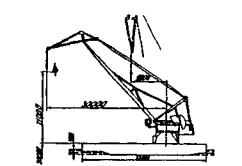
Рис. 46. Плавучий кран «Ганц»-16/30 (Венгрия)
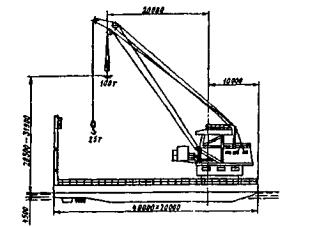
Рис. 47. Плавучий кран «Черноморец»
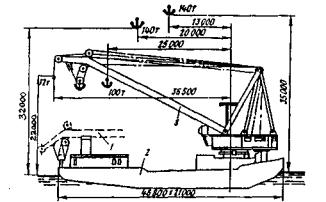
Рис. 48. Плавучий кран «Севастополец»
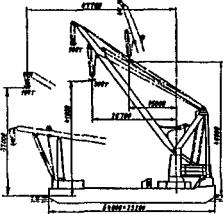
Рис. 49. Плавучий кран «Богатырь»
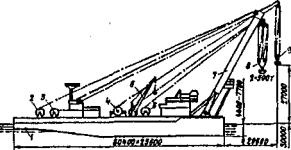
Рис. 50. Плавучий кран «Витязь»:
1 - понтон; 2 - лебедка изменения вылета стрелы; 3 - лебедка палубных талей грузоподъемностью 2×200 т (используется при подъеме грузов массой 1600 т); 4 - лебедка вспомогательного подъема; 5 - судовой кран; 6 - лебедка главного подъема; 7 - стрела; 8, 9 - подвески соответственно главного и вспомогательного подъемов
Плавучие самоходные краны имеют штатные расчалочные устройства - якоря или сваи, которыми они закрепляются за дно реки.
Специализированные сборно-разборные краны. Отечественные краны этого типа (табл. 19) предназначены и серийно выпускались специально для мостовых организаций. Они просты по конструкции - плашкоут с треугольной стрелой, вращающейся только в вертикальной плоскости, т.е. это - шевр-краны (рис. 51). На стрелу сборно-разборного крана можно навешивать копровую стрелу, превращая его в плавучий копер. Но это несамоходные и неповоротные краны, их перемещение происходит якорными лебедками. Поэтому у них малая маневренность и производительность, они требуют специальных расчалочных устройств, сужающих фарватер на реке и препятствующих судоходству (рис. 52). Поэтому плавучие краны первой и третьей групп более предпочтительны.
Таблица 19
Техническая характеристика сборно-разборных плавучих кранов
|
Характеристики |
Марка крана |
|||
|
ПРК-30/40 |
РК-30/50 |
ПРК-80 |
ПPК-100 |
|
|
Грузоподьемность, т: |
|
|
|
|
|
- максимальная |
40 |
45 |
80 |
100 |
|
- минимальная |
12 |
13 |
24 |
56 |
|
Вылет стрелы, м: |
|
|
|
|
|
- минимальным |
2 |
2 |
9,5 |
10,2 |
|
- максимальный |
17 |
13 |
24,5 |
27,2 |
|
Высота подъема крюка над палубой, м: |
|
|
|
|
|
- максимальная |
30 |
25 |
26 |
32 |
|
- минимальная |
18 |
16 |
13 |
24 |
|
Число понтонов |
НЖМ-56 |
НЖМ-56 |
НЖМ-56 |
НЖМ-56 |
|
Число понтонов |
12 |
12 |
19 |
24 |
|
Размеры плашкоута, м: |
|
|
|
|
|
- длина |
21,7 |
21,7 |
27,3 |
28,8 |
|
- ширина |
10,5 |
10,5 |
18,62 |
21,6 |
|
- высота борта |
1,2 |
1,2 |
1,2 |
1,2 |
|
Осадка плашкоута, м |
1,0 |
1,0 |
1,0 |
1,0 |
|
Водоизмещение без груза, т |
150 |
150 |
335 |
530 |
|
Масса крана без понтонов и балласта |
61 |
57 |
147 |
205 |
Установка сухопутных кранов на плавсредства. Для формирования плавучих крановых установок из сухопутных кранов (автомобильных, гусеничных, пневмоколесных, козловых и деррик-кранов) могут использоваться плашкоуты различного типа: из барж речного и морского флота, сборно-разборных понтонов мостового парка типа КС, понтонов наплавных мостов типа ПЖМ-56 и др. (см. раздел 7). Тип плашкоута принимается в зависимости от конкретных местных условий.
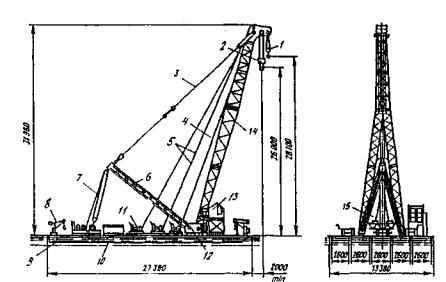
Рис. 51. Плавучий разборный кран ПРК-80:
1, 2 - подвески главного и вспомогательного полиспастов соответственно; 3 - оттяжка стреловая: 4, 5 - трос лебедки вспомогательного и главного полиспастов соответственно; 6 - стойка качающаяся; 7 - полиспаст стреловой; 8 - крамбол; 9 - плашкоут; 10 - электростанция; 11 - лебедка грузовая с тяговым усилием 8 тс (4 шт.); 12 - узел опорный; 13 - кабина управления; 14 - стрела; 15 - установка манипуляторной лебедки
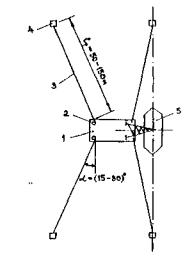
Рис. 52. Схема расчаливания плавкрана второй или третьей группы при сооружении опоры;
1 - плавкран; 2 - якорные лебедки: 3 - расчалки из стальных канатов; 4 - железобетонные якоря-присосы; 5 - опора
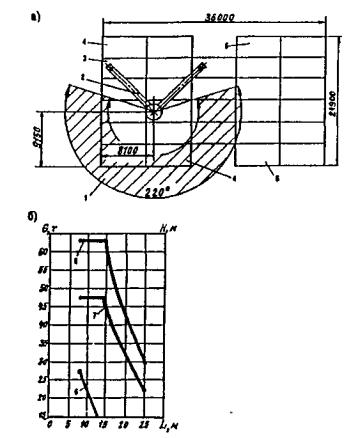
Рис. 53. Схемы установки деррик-крана МДК-63 на плашкоут из понтонов КС-63:
а - МДК-63 в плане (сборка III); б - грузовысотные характеристики; 1 - рабочая зона стрелы при максимальной расчетной грузоподъемности; 2 - стрела крана; 3 - основной плашкоут из 20 понтонов КС-63 (сборка I); 4 - дополнительные понтоны (4 шт., сборка II); 5 - дополнительные понтоны (4 шт., сборка III); 6 - грузоподъемность при длине стрелы 25 м (сборка I); 7 - то же (сборка II); 8 - то же сборка III)
Технические требования к установке сухопутных кранов на плавсредства и методы их расчета приведены в приложении к данному учебному пособию.
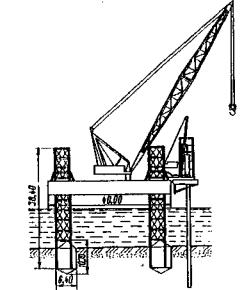
Рис. 54. Самоподъемная плавучая платформа (пример строительства моста через оз. Маракайбо в Венесуэле)
Следует иметь в виду, что грузовысотные характеристики сухопутного крана, установленного на плашкоут, в ряде случаев по сравнению с работой крана на ровной горизонтальной поверхности меняются в худшую сторону из-за влияния на его устойчивость крена и дифферента плавсистемы при работе на воде (рис. 53).
Краны на самоподьемных платформах. Плавучие самоподъемные платформы являются эффективным вспомогательным сооружением, в первую очередь, для возведения опор. Самоподъемная платформа имеет плашкоут и опорные колонны с подъемными установками (рис. 54). Платформу транспортируют к месту сооружения опоры, где временно расчаливают. После этого работой подъемных домкратов при упоре опорных колонн в грунт дна производится подъем плашкоута над водой. Опорные колонны могут иметь внизу башмаки или заглубляться в грунт. Поднятый над водой плашкоут превращается в стационарную рабочую площадку, которая может служить для установки грузоподъемных кранов, размещения складов, оборудования и прочего оснащения.
7. ТРАНСПОРТ НА СТРОИТЕЛЬСТВЕ МОСТОВ
На строительстве мостов используют обычные средства наземного транспорта - железнодорожный и автомобильный подвижной состав. Тип и марку транспортного средства в каждом конкретном случае подбирают с учетом массы, габаритов и условий перевозки груза.
Значительную трудность составляет перевозка по местным и временным автомобильным дорогам таких крупногабаритных грузов, как балки и блоки железобетонных и металлических пролетных строений, секции свай-оболочек большого диаметра и др. Для этого приходится приспосабливать существующие автомобильные прицепы-тяжеловозы и трейлеры грузоподъемностью до 60-70 т, предназначенные для перевозки строительной техники, а в некоторых случаях создавать специальные транспортные средства.
Например, имеются прицепы-балковозы Р-6333 грузоподъемностью 63 т Тайшетского РМЗ и ПТ-75 грузоподъемностью 75 т Золотоношского РМЗ (Украина), предназначенные для транспортировки железобетонных балок автодорожных мостов длиной до 33 м (рис. 55).
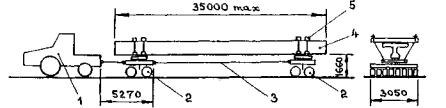
Рис. 55. Прицеп-балковоз ПТ-75:
1 - тягач К-701; 2 - тележка прицепная; 3 - перекрестные тросовые тяги; 4 - перевозимая балка; 5 - платформа (скоба)
Кроме того, специальные тележки-балковозы могут входить в комплект консолыю-шлюзовых кранов и др.
Специфическими для мостостроения являются работы на акваториях рек. В строительстве мостов применяют разнообразные плавучие средства для перевозки грузов с причалов к месту сооружения опор или с берега на берег реки. В отдельных случаях используют временные наплавные мосты. Кроме того, плавучие средства могут использоваться для установки на них сухопутных кранов и копров (см. п. 6.5 и приложение).
Применяют плавучие средства двух основных типов: баржи речного флота и сборно-разборные плашкоуты из инвентарных понтонов. Как правило, мостостроители используют арендуемые баржи. Инвентарные понтоны - собственные или арендуемые средства.
Баржи бывают самоходными и несамоходными [26]. Несамоходные баржи и плашкоуты из понтонов транспортируются буксирами.
Для водных путей страны типичны баржи-площадки (рис. 56) с грузоподъемностью 300, 600 и 1000 т. Ранее их строили большими сериями. Прочность палубы, как правило, достаточна для погрузки техники.
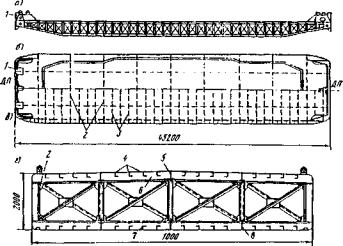
Рис. 56. Баржа-площадка грузоподъемностью 300 т:
а - продольный разрез корпуса; б - план палубы (ДП - диаметральная плоскость); в - схема полпалубного набора; г- сечение корпуса по поперечной ферме; 1 - упоры для толкания баржи буксиром; 2 - поперечные фермы; 3 - рамные шпангоуты; 4 - подпалубные уголки жесткости; 5 - карлингс; 6 - бимс; 7 - флор (поперечная балка днища); 8 - кильсон (продольная балка днища)
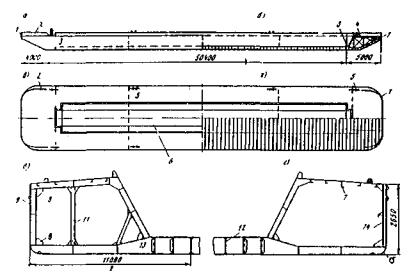
Рис. 57. Бункерная баржа для перевозки каменных материалов:
а - вид с борта; б - продольный разрез корпуса; в - вид сверху; г - план набора днища (нижняя часть); д - поперечный разрез по рамному шпангоуту; с - то же, но холостому шпангоуту; 1 - транец; 2 - фальшборт; 3 - поперечная переборка; 4 - раскосы продольной фермы; 5 - кнехты; 6 - грузовой бункер; 7 - карлингс; 8 - кница (узловая фасонка); 9 - рамный шпангоут; 10 - бимс; 11 - пиллерс (стойка); 12 - кильсон; 13 - флор; 14 - холостой шпангоут; 15 - скуловой лист обшивки
Открытые и бункерные баржи (рис. 57) составляют вторую по распространенности группу. Грузоподъемность их колеблется в пределах от 1000 до 4500 т, хотя встречаются суда и меньшего тоннажа - 150…600 т. Прочность трюмных барж обычно зависит от целости поперечных переборок, распорок и комингсов.
Палубные баржи и лихтеры (баржи с грузовыми стрелами) имеют люки не на всю площадь трюмов. Прочность палуб, как правило, сильно ограничивает вес устанавливаемого груза.
Для сборки транспортных и иных плашкоутов применяют инвентарные металлические понтоны закрытого типа (табл. 20).
Понтоны первых трех марок в табл. 20 предназначены для мостостроения, а последние три конструкции могут заимствоваться из имущества мостовых парков для временных и краткосрочных наплавных мостов.
Таблица 20
Техническая характеристика инвентарных металлических понтонов
|
Характеристики |
Марка понтона |
|||||
|
КС-63 |
УП-78 |
П-12 |
НЖМ-56 |
ПМ-70 |
ТПП |
|
|
Габаритные размеры, м: |
|
|
|
|
|
|
|
- длина |
7,2 |
6,0 |
12,0 |
9,0 |
6,75 |
5,97(4,91) |
|
- ширина |
3,6 |
3,0 |
3,0 |
2,6 |
2,85 |
2,4 |
|
- высота |
1,8 |
1,4 |
1,5 |
1,2 |
1,4 |
1,0 |
|
Масса, т: |
|
|
|
|
|
|
|
- без соединительных элементов |
6,28 |
4,57 |
11,5 |
4,0(3,7) |
4,54 |
1,05(1,0) |
|
- соединительных элементов |
0,52 |
0,4 |
0,5 |
- |
- |
- |
|
Водоизмещение полное, т |
45 |
24,5 |
52,6 |
28,0 |
26,9 |
14,3(11,8) |
|
Нагрузка наибольшая на понтон, кН |
260 |
160 |
340 |
120 |
240 |
80 |
|
Нагрузки местные предельные, кН: |
|
|
|
|
|
|
|
- в любой точке шпангоута |
30 |
35 |
87 |
- |
- |
- |
|
- в бортовых узлах |
380 |
200 |
440 |
90 |
150 |
70 |
Примечание. Размеры и масса в скобках указаны для средних секций понтонов.
Понтоны КС-63 (ранее выпускались понтоны КС, КС-У, КС-3, КС-3М) и УП-78 имеют болтовые соединения на накладках (рис. 58, г), что обеспечивает несущую способность стыков, близкую к несущей способности основных сечений понтонов. В транспортных плашкоутах понтоны собирают, как правило, плашмя (при высоте борта 1,8 м или 1,4 м).
К числу недостатков понтонов КС-63 и УП-78 следует отнести значительное количество болтовых соединений, необходимость устройства стапелей для сборки и разборки плавучих систем на берегу, а также невозможность движения автомобилей непосредственно по палубе понтона из-за малой толщины листа обшивки (4 мм).
Понтоны П-12 имеют замковые соединения, позволяющие собирать и разбирать плавсистемы на воде (рис. 58, е). Замок может воспринимать предельное усилие растяжения 170 кН. Количество замковых соединений по торцу понтона - 7, по борту - 11. Палуба понтона (толщина обшивки 8 мм) выполнена в виде ортотропиой плиты для непосредственного пропуска по ней автотракторной техники.
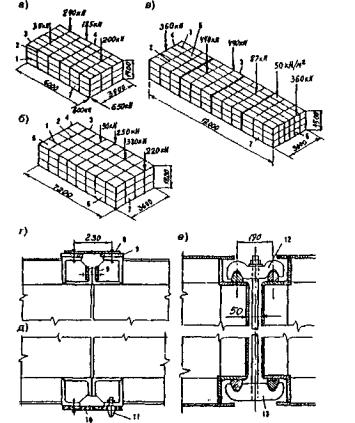
Рис. 58. Понтопы и детали их соединения между собой:
а - УП-78; б - КС-63; в - П-12; г - болтовой стык понтонов КС-63 и УП-78; д - вариант нижнего самозахватного сцепа для сборки и разборки понтонов КС-63 и УП-78 на плаву; е - замковый стык понтонов П-12; 1 - кильсон; 2 - шпангоут; 3 - бортовой элемент; 4 - торцевом элемент; 5 - палуба; 6 - борт; 7 - торец; 8 - стыковая планка; 9 - стыковая накладка; 10 - планка; 11 - конический самозахватный штырь; 12 - верхний замок; 13 - штанга
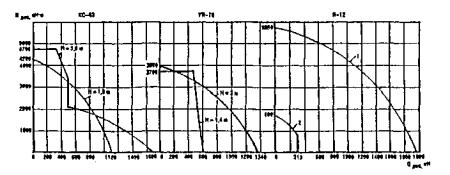
Рис. 59. Графики предельно допускаемых усилий Мдоп и Qдоп, на понтоны:
1 - основное сечение понтона; 2 - сечение по стыку
При конструировании плашкоутов, кроме расчета на плавучесть и остойчивость [24] - [26]; необходимо выполнить проверку прочности плашкоута как балки на упругом основании по общему изгибу (рис. 59) и по местным сосредоточенным нагрузкам (рис. 58, а-в).
Плашкоуты из понтонов оснащают кнехтами, кранцами и транцами для швартовки, лебедками и киповыми планками для расчаливания и перемещения на небольшие расстояния, аварийными якорями и насосами для откачки воды при повреждении обшивки понтонов.
Необходимую для перемещения плавучих средств мощность буксиров определяют по формуле
N б y кс = (W+N)/P, (31)
где W - расчетная сила давления ветра на надводную часть плавсистемы, принимаемая при максимальной скорости ветра v = 10 м/с, исходя из интенсивности давления 180 Н/м2 площади надводной части плавсистемы; N - расчетная гидродинамическая нагрузка на подводную часть плавсистемы; Р - удельная сила тяги буксира, принимаемая равной 100-150 Н/л. с. (120-200 Н/кВт).
Гидродинамическое давление воды на подводную часть плавсистемы принимается равным
N = N л +N т , (32)
где Nл - лобовое давление воды, Н, равное
Nл = 500φ0F v 2 , (33)
N т - сила трения воды по поверхности плавающего тела, H , определяемая по формуле
N т = f Sv 2 , (34)
где φ0 - коэффициент, принимаемый равным 0,75 для закругленного очертания судна и 1,0 - для прямоугольного очертания; F - подводная площадь по миделю (наиболее широкому поперечному сечению), м2; v - максимальная относительная скорость перемещения воды и плавсредства, м/с; f = 0,17 - коэффициент трения воды по металлической поверхности судна; S - площадь смоченной поверхности (поверхность трения воды), м2.
Значения F и S для плашкоутов и барж принимаются равными
F=tB ; S = L(2t+B), (35)
где t, В и L - соответственно осадка, ширина и длина судна, м.
Помимо давления текущей воды учитывают нагрузку от воздействия волн: 300 Н/м для рек шириной 300-500 м и 1200 Н/м - при ширине 500 м и более.
8. ПОДЪЕМНО-ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ
Одним из основных факторов, обеспечивающих высокую производительность, надежность и безопасность монтажных работ, является технически грамотное применение малого подъемно-транспортного оборудования. К числу таких вспомогательных машин и механизмов, применяемых на любом строительстве мостов, относятся: лебедки, такелажное оборудование, строповочные устройства, домкраты и др.
8.1. Лебедки и такелажное оборудование
Лебедки - простые грузоподъемные машины, состоящие из приводного барабана и стального каната, наматываемого на барабан при рабочем ходе лебедки и сматываемого с барабана при холостом ходе. Лебедки могут быть с ручным или механическим приводом (рис. 60, а, б). Кроме того, используют фрикционные лебедки, у которых есть тормоз, позволяющий быстро освобождать барабан для свободного разматывания каната (рис. 60, б). Такие лебедки необходимы в сваебойных агрегатах со свободно падающей ударной частью, в установках для подводного бетонирования способом ВПТ; их устанавливают на кранах. Во всех механических лебедках скорость перемещения каната постоянна, если в редукторе нет коробки передач.
Основными характеристиками лебедок, помимо скорости навивки каната, являются грузоподъемность (максимальное тяговое усилие), канатоемкость, т.е. длина каната, который может быть уложен на барабане, и диаметр каната.
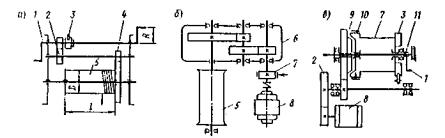
Рис. 60. Схемы лебедок:
a - барабанная с ручным приводом; б - электрореверсивная; в - фрикционная; 1 - рукоять; 2, 4 - зубчатые передачи; 3 - храповик; 5 - барабан; 6 - редуктор; 7 - тормоз; 8 - электродвигатель; 9 - фрикционная муфта; 10 - тормоз ленточный; 11 - гайка
Отечественной промышленностью выпускаются лебедки ручные монтажные под диаметр каната 6,2-21 мм с тяговым усилием 2,5 - 50 кН и канатоемкостью 35-200 м (см. [24]). В мостостроении такие лебедки (ТЛ-3А или ТЛ-5А) применяют для оборудования плавсистем.
Из электрических лебедок используют преимущественно марки ПЛ-5-68 и ЛК-8 с тяговым усилием 50 и 80 кН, скоростью навивки каната 30 и 6 м/с, канатоемкость 450 и 200 м, диаметром каната 21 и 28 мм соответственно. Электрические лебедки, как правило, применяют для перемещения грузов по горизонтали.
В такелажных устройствах в качестве тягового органа используют стальные канаты. Канаты изготавливаются путем свивки отдельных проволочек из углеродистой стали. Они могут быть одинарной и двойной свивки, односторонней, крестовой и комбинированной свивки (рис 61). Шагом свивки каната называется расстояние между двумя метками, в которое укладывается число витков, равное числу прядей в канате. Канаты крестовой свивки более устойчивы к раскручиванию.
По расположению проволок канаты бывают с точечным касанием проволок между слоями прядей (ТК), с линейным касанием (ЛК), а также с точечным и линейным касанием проволок в прядях (ТЛК). Канаты типа ТЛК наиболее прочные и износостойкие, рекомендуются для такелажных устройств.
Диаметр каната подбирают по разрывному усилию Р, определяемому в зависимости от нормативного усилия натяжения каната S: где k - коэффициент запаса прочности каната [ 24, табл. 2.1]; [Р] - предельно допустимое разрывное усилие по ГОСТ или сертификату завода-изготовителя.
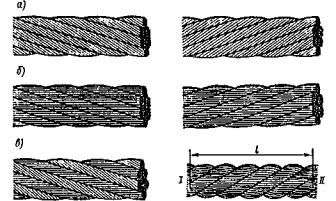
Рис. 61. Свивка канатов:
а - параллельная; б - крестовая; в - комбинированная; l - шаг свивки
P = Sk ≤ [P], (36)
Срок службы стального каната колеблется от нескольких недель до нескольких лет. Он зависит от его конструкции, условий работы и хранения. При появлении обрывов проволок канаты подлежат браковке согласно «Правилам устройства и безопасной эксплуатации грузоподъемных кранов».
Для закрепления концов стальных канатов к различным частям подъемных или тяговых механизмов и строповки пользуются различными приемами (рис. 62). При этом используют стандартные детали крепления канатов (коуши, сжимы, зажимы, клиновые втулки и пр.).
Имеющиеся лебедки развивают относительно небольшие тяговые усилия (до 50-80 кН). Но в ряде технологий, таких как продольная и поперечная передвижка, подъемка пролетных строений и др., возникает необходимость в приложении значительно больших сил. Увеличение тягового усилия во много раз при неизменном тяговом усилии лебедки возможно за счет применения специального механизма - полиспаста.
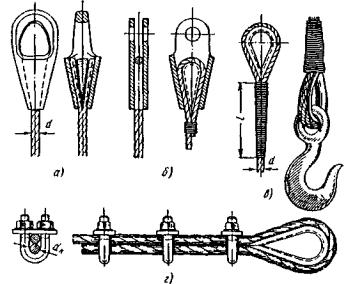
Рис. 62. Различные способы крепления каната:
а - канатной втулкой; б - клиновой втулкой; в - сращиванием каната; г - зажимами с коушем
Полиспаст представляет собой систему из подвижных и неподвижных блоков, последовательно огибаемых канатом (рис. 63). Блоки полиспаста собирают на единых осях в две обоймы: подвижную и неподвижную. Один конец каната закрепляют на подвижной (рис. 63, б, г) или неподвижной (рис. 63, а, в) обойме, а второй (обегающий) - на барабане лебедки.
Применение полиспастов дает нам выигрыш в силе, так как при пом увеличивается передаточное число механизма. Но мы проигрываем в скорости, поскольку канат должен несколько раз пройти через блоки, прежде чем выйдет «на финишную прямую» - к барабану лебедки.
Основной характеристикой полиспаста является его кратность, т.е. отношение скорости vбар навивания каната на барабан к скорости vгр перемещения груза или, иначе, кратность полиспаста равна числу ветвей каната, на которые распределяется нагрузка, приложенная к подвижной обойме. У полиспаста, показанного на рис. 63, а и в, i = 4; на рис. 63, б - i = 3; на рис. 63, г - i = 5.
i = v бар /v гр (37)
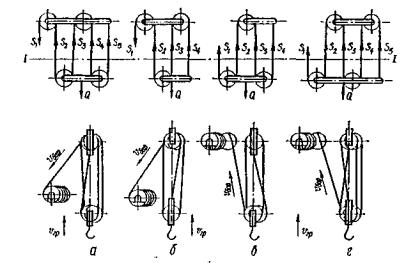
Рис. 63. Схемы одинарных полиспастов:
а , б - с ветвью, сходящей с неподвижного блока; в г, - с ветвью, сходящей с подвижного блока
Усилие в любой нитке полиспаста Sk определяется по формуле
Sk = (f- 1)fi-k Q/(fi-1) = akQ, (38)
где f - коэффициент, учитывающий потери от трения в подшипниках блока и жесткости каната ( f = 1,02 для блоков на подшипниках качения и f = 1,04 - для блоков на бронзовых втулках); k - номер нитки (ветви) полиспаста; i - кратность полиспаста; Q - тяговое усилие или вес груза, кН.
Для выбора каната, блоков полиспаста и подбора лебедки необходимо определить усилие натяжения ветви каната, сходящей с последнего блока и идущей к барабану лебедки. При известной схеме полиспаста можно решить обратную задачу, т.е. определить тяговое усилие полиспаста Q по усилию в канате лебедки S1:
Q = S 1 /α 1 . (39)
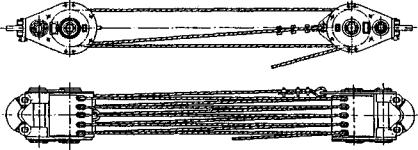
Рис. 64. 50-тонный полиспаст (11 нитей)
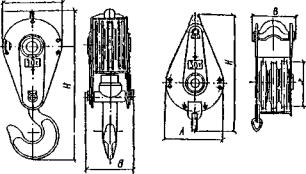
Рис. 65. Примеры многорольных блоков
Например, для полиспаста по схеме на рис. 63, г при S1 = 50 кН i = 5, f = 1,04-α1 = (1,04-1)×1,04(5-1)/(1,045-1) = 0,216;
Q = 50/0,216 = 230 кН.
Диаметр блока, огибаемого стальным канатом, должен соответствовать условию
D ≥ de , (40)
где d - диаметр каната; е - коэффициент, принимаемый по табл. 2.2 [24].
Полиспасты (пример см. на рис. 64) обычно выполняют из стандартных многорольных блоков (рис. 65).
Следует иметь в виду, что предельная длина полиспаста (максимальное расстояние между осями неподвижного и подвижного блоков), особенно многониточного, ограничивается канатоемкостыо барабана лебедки. Например, для полиспаста на рис. 64 при канатоемкости лебедки 250 м предельная длина полиспаста составляет всего 250/12 = 20 м. Ограничивается и минимально возможная длина полиспастов - обычно она не бывает меньше 2-3 м.
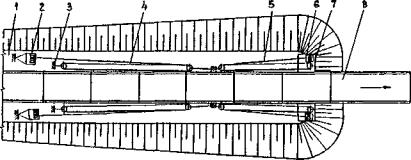
Рис. 66. Схема надвижкп пролетного строения при помощи лебедок (в плане):
1 - насыпь подхода; 2 - тормозная лебедка; 3 - грунтовый якорь; 4 - тормозной полиспаст; 5 - тяговый полиспаст; 6 - тяговая лебедка; 7 - устой моста; 8 - пролетное строение
Из-за ограничения их длины продольная надвижка пролетных строений при помощи лебедок производится циклами с многократной перепасовкой полиспастов. На рис. 66 показан пример такой надвижкп. Неподвижные блоки и лебедки закрепляют за неподвижные части конструкции (опоры) и за грунтовые якоря на насыпях подходов.
Отказаться от полиспастов и тем самым повысить производительность монтажных работ, упростить оборудование позволяют последние отечественные разработки, в частности, тросовые тяговые агрегаты, включающие лебедки с гидроприводом. К примеру, гидравлическая лебедка с тяговым усилием 25 тс довольно компактна: она имеет габаритные размеры 1,5×0,9×0,8 м и массу 1,5 т (рис. 67). На надвижку устанавливают две тяговые лебедки с возможностью обеспечением синхронности их работы. Гидропривод обеспечивает большой диапазон скоростей движения, в том числе и «ползучую» скорость, необходимую при подходе к опоре конца пролетного строения.
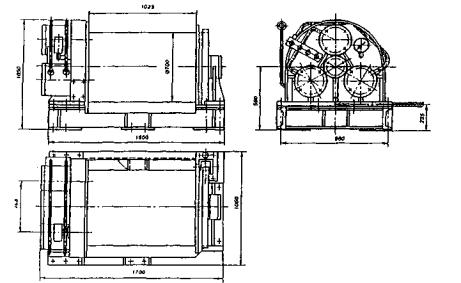
Рис. 67. Тяговая гидравлическая лебедка с усилием на тросе 25 тс
8.2. Строповочные устройства и траверсы
При производстве монтажных работ грузоподъемными машинами поднимают и перемещают в пространстве различные мостовые конструкции, целиком или отдельными блоками. Грузоподъемный кран представляет собой машину универсального назначения, оборудованную крюком. Соединение крюка с поднимаемой конструкцией осуществляется с помощью строповогных приспособлений, тип и конструкция которых зависят от параметров конкретного груза.
Монтаж мостовых конструкций производят, как правило, укрупненными блоками, что требует специальных схем строповки и стро-повочных устройств (примеры показаны на рис. 68).
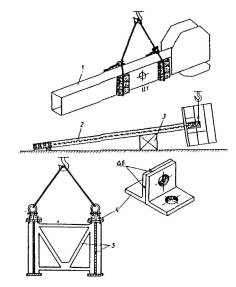
Рис. 68. Строповка элементов пролетного строения:
1 - нижний пояс; 2 - стойка (подвеска); 3 - шпальная клетка; 4 - уголковый захват; 5 - панель продольных балок
Стропы изготавливают из кусков стального каната нужного диаметра. По конструкции стропы можно разделить на универсальные, облегченные и многоветвевые (рис. 69). Методика расчета строповочных устройств изложена в [24].
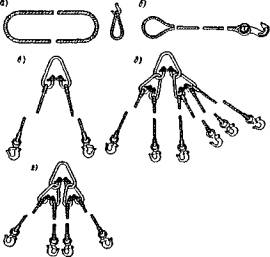
Рис. 69. Стропы:
а - универсальный; б - облегченный с крюком; в - двухветвевой; г - четырехветвевой; д - шестиветвевой
Недостатками строповочных устройств являются высокая трудоемкость при строповке и расстроповке, низкая безопасность (частые обрывы стропов и строповочных петель в конструкции) и, самое главное, такелажнику после монтажа необходимо подниматься к узлу крепления стропа для его расстроповки. При большой длине балки и при обычном угле наклона строп к горизонту 40 - 50° сильно возрастает высота подъема груза, падает связанная с этим грузоподъемность крана. В результате требуется более мощный и дорогостоящий кран.
Для строповки тяжелых, длинномерных мостовых конструкций сложной конфигурации применяют траверсы - специальные строповочные устройства. Они служат не только для закрепления груза к крюку крана, но и другим целям: уменьшению высоты строповки, повышению безопасности монтажа (см. [24]). В этом случае строповочные петли не нужны. Ориентированные на конструкции определенного вида траверсы могут выполняться с автоматическими захватами.
Но не следует забывать, что, в отличие от достаточно легких строповочных устройств, траверсы часто имеют большую собственную массу, которую следует прибавлять к весу груза при подборе крана.
8.3. Домкраты
Домкраты применяют для подъема, опускания и горизонтального перемещения мостовых конструкций. По принципу действия домкраты бывают механические (реечные и винтовые) и гидравлические (рис. 70).
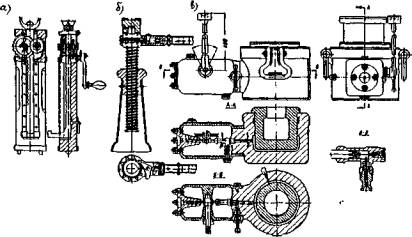
Рис. 70. Домкраты: a - реечный; б - винтовом; в - гидравлический
Реечные и винтовые домкраты, имеющие относительно малую грузоподъемность (до 10 т), при монтаже мостовых конструкций применяют сравнительно редко.
Гидравлические домкраты являются более мощными малыми машинами, и поэтому получили наибольшее распространение. Принцип действия гидравлического домкрата следующий: под давлением жидкости, которая подается в цилиндр, поршень домкрата выдвигается из цилиндра и перемещает груз. В качестве рабочей жидкости используется минеральное масло (веретенное или турбинное).
Грузоподъемность домкрата определяется по следующей формуле: Р д = рА, где р - давление масла в рабочей полости домкрата; А - площадь поршня домкрата, А = π D 2 /4; D - диаметр поршня домкрата.
На рис. 70, в показан гидродомкрат с ручным насосом. Как правило, домкраты грузоподъемностью 100 т и более оборудуются передвижными насосными станциями с плунжерными насосами. Производительность насосной станции Q выбирают, исходя из необходимой скорости v выдвижения штока домкрата, т.е. Q ≥ Av.
На строительстве мостов в основном используют для подъема конструкций гидродомкраты грузоподъемностью 100...500 т с ходом поршня 100...200 мм, а для надвижки пролетных строений - домкраты грузоподъемностью 185 т с большим ходом поршня - 1,1 м (табл. 21).
Таблица 21
Техническая характеристика гидравлических домкратов общего назначения
|
Характеристики |
Марка домкрата |
|||||
|
ДГ-20 |
ДГ-63 |
ДГ-100-2 |
ДГ-200-2 |
ДГ-500 |
ДГ-185/1120 |
|
|
Грузоподъемность, т |
20 |
63 |
100 |
200 |
500 |
185 |
|
Ход поршня, мм |
250 |
250 |
155 |
155 |
600 |
1120 |
|
Диаметр поршня, мм |
50 |
100 |
110 |
150 |
350 |
300 |
|
Рабочее давление, MПa |
40 |
40 |
40 |
40 |
40 |
40 |
|
Габаритные размеры: |
|
|
|
|
|
|
|
- длина |
226 |
300 |
367 |
427 |
655 |
1620 |
|
- ширина |
156 |
230 |
190 |
260 |
475 |
0351 |
|
- высота |
380 |
420 |
325 |
370 |
680 |
- |
|
Масса, кг |
28 |
65 |
55 |
110 |
850 |
810 |
|
Привод |
Ручной одноплунжерный насос |
Насосные станции приводные НСП-400 и другие |
||||
В последние годы идет активная разработка и внедрение специальных домкратных установок для надвижки пролетных строений. К примеру, фирмой СТС («Следящие тест-системы») успешно используются длинноходовые (2500 мм) гидроцилиндры, развивающие усилие до 3000 кН, в комбинации с гидрочелюстямн (захватами за нижние пояса стальных балок) с усилием до 7000 кН (рис. 71). В комплект также входят гидравлический синхронизатор движения гидроцилиндров и насосная станция.
Рис. 71. Гидроцилиндр с гидрочелюстями для надвижки пролетных строений
Мостостроители часто испытывают трудности при размещении домкратов под конструкциями. Пример - подъем железобетонных балок эксплуатируемых мостов, на опорах которых из экономии оставлено мало места. В этом случае эффективны компактные гидродомкраты беспоршневого типа, например сильфонные (рис. 72).
Рис. 72. Беспоршневой домкрат
Ход таких домкратов достигает 20 мм при грузоподъемности до 200 т.
Небольшая высота подъема груза гидродомкратами приводит к необходимости в ряде случаев многократной их перестановки. Для этого поднятый груз временно опирают в промежуточном положении на металлические (рельсовые) клетки, после чего поршень домкрата опускают. Затем домкрат поднимают до упора в груз, а под подошву домкрата подводят подкладку необходимой толщины. Далее цикл повторяется.
Существуют конструкции гидродомкратов, которые упрощают описанную процедуру: это телескопический домкрат (рис. 73) и домкрат непрерывного подъема (рис. 74).
Помимо домкратов, применяемых для пространственного перемещения конструкций, в мостостроении используют специальные домкраты для предварительного натяжения арматуры железобетонных конструкций.
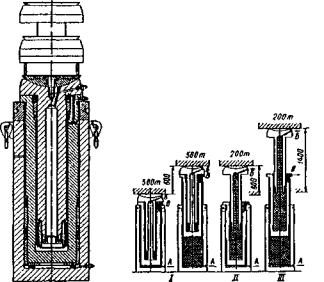
Рис. 73. Телескопический домкрат
Рис. 74. Схема действия гидравлического домкрата непрерывного подъема
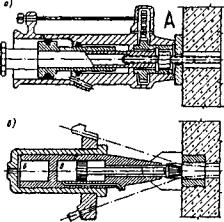
Рис. 75. Схема гидродомкратов для натяжения арматуры:
а - для стержневой арматуры; б - для пучковой арматуры
Гидродомкрат для натяжения стержневой арматуры (рис. 75, а) надевают стороной А на арматурный стержень, заканчивающийся резьбой, и вручную навинчивают на него шток, после чего через штуцер нагнетают масло в полость домкрата.
Существуют также гидродомкраты для натяжения пучковой и тросовой арматуры, при помощи которых можно натягивать одновременно все проволоки или канаты пучка (рис. 75, б, табл. 22). Их называют также домкратами двойного действия, так как они одновременно производят вытягивание пучка и задавливание пробки в конусный анкер.
Таблица 22
Техническая характеристика гидравлических домкратов для предварительного натяжения арматуры
|
Характеристики |
Марка домкрата |
||||||
|
СМЖ-82Б |
СМЖ-84Б |
СМЖ-81Б |
СМЖ-25 |
ДГ-1600 |
ДГ-2600 |
ДГ-4000 |
|
|
ДГС63-315 |
ДГС100-125 |
ДГП63-315 |
СМ-513Б |
||||
|
Тяговое усилие, кН |
630 |
1000 |
630 |
630 |
1600 |
2600 |
4000 |
|
Рабочий ход поршня, мм |
315 |
125 |
315 |
800 |
400 |
400 |
400 |
|
Рабочее давление, МПа |
40 |
40 |
40 |
40 |
40 |
40 |
40 |
|
Габаритные размеры: |
|
|
|
|
|
|
|
|
- длина |
1090 |
1200 |
912 |
3080 |
1125 |
1160 |
- |
|
- ширина |
210 |
755 |
245 |
1670 |
315 |
390 |
- |
|
- высота |
260 |
1320 |
265 |
1375 |
315 |
390 |
- |
|
Масса, кг |
90 |
625 |
75 |
3200 |
- |
518 |
- |
|
Тип арматуры |
стержни Ø28-40 |
стержни Ø16-40 |
пров. 18×5 24×5 |
пров. 18×5 24×5 |
7 канатов К-7 |
12 канатов К-7 |
19 канатов К-7 |
9. РУЧНОЙ МЕХАНИЗИРОВАННЫЙ ИНСТРУМЕНТ
В зависимости от взаимосвязей между предметом труда, орудиями труда и исполнителями в процессе выполнения технологических операций различают следующие виды труда.
Ручной труд ручным инструментом - это подъем и перемещение грузов ручными лебедками, талями, полиспастами, реечными домкратами, работа гаечным ключом, ломом, лопатой, кувалдой и т.п.
Ручной труд механизированным инструментом - сверление отверстий, затягивание болтов, работа с клепальными, рубильными и отбойными молотками, вибраторами, краскопультами и другие операции.
Ручной труд при машинах - это работа строповщиков и такелажников, сварщиков и газорезчиков.
Механизированный труд - управление работой машины, выполняющей технологический процесс.
Автоматизированный труд - в этом процессе рабочий является оператором при одной или нескольких машинах, работающих в полностью механизированном режиме.
Ручной труд ручным инструментом - наиболее тяжелый и малопроизводительный физический труд. Он в первую очередь должен механизироваться или, по крайней мере, его доля должна постоянно сокращаться. Применение механизированного инструмента в определенной мере облегчает труд рабочего и значительно повышает его производительность. Но при этом появляются вредные воздействия на организм: шум, вибрация, токсичные аэрозоли.
Эти два вида ручного труда должны играть в технологическом процессе вспомогательную роль. Однако, несмотря на существенные успехи в комплексной механизации технологических процессов, в целом по мостостроению доля ручного труда составляет более 50%. Причем весьма значительный объем ручных работ приходится не на вспомогательные и сопутствующие, а на основные технологические операции. Наиболее трудоемкими с большой долей ручного труда являются следующие технологические процессы:
Доля ручного труда, %
|
Омоноличивание продольных стыков сборных железобетонных пролетных строений………………………………………………………………………… |
до 100 |
|
Установка пучков, приготовление и нанесение клеевых растворов при монтаже поперечно-члененных железобетонных пролетных строений…… |
до 100 |
|
Устройство гидроизоляции различного вида………………………………… |
до 100 |
|
Пескоструйная очистка контактных поверхностей, постановка высокопрочных болтов при монтаже стальных пролетных строений…….. |
100 |
|
Стыковка свай-оболочек при их погружении……………………………….. |
100 |
|
Срубка голов свай и устройство ростверков………………………………… |
92 |
|
Монтаж стальных пролетных строений на высокопрочных болтах и сварке |
75 |
|
Укладка и уплотнение монолитного бетона……………….…………………. |
70 |
Поэтому усилия ученых и инженеров должны быть направлены на ликвидацию или, по крайней мере, значительное сокращение физически тяжелого, монотонно-изнуряющего и токсично-вредного ручного труда. Но полная механизация некоторых технологических операций требует создания сложных и дорогостоящих машин, значительно повышающих себестоимость производимой продукции. В этих случаях целесообразно создание приспособлений и механизмов, решающих частные задачи облегчения ручного труда. Такие механизмы принято называть средствами малой механизации (СММ).
Ниже в качестве примера приведем некоторые отечественные образцы ручного механизированного инструмента.
Для очистки поверхности металлоконструкций применяют щетки прямые и угловые, как с электро- (ИЭ-2106, ИЭ-2009, Ш-178-1, WSBA-1400), так и с пневмоприводом (ИП-2014А, П-22, ИП-2104), имеющие число оборотов в минуту - 4600 - 7200, собственный вес от 3 до 6,5 кг.
Применяют также ручные шлифовальные электрические (ИЭ-2004АУ-2, ИЭ-6103А, ИЭ-8201Б) и пневматические (ИП-2203А, ИП-2015, ИП-2014А) машины с диаметром шлифовального круга 100 - 200 мм, частотой вращения 2900-7600 об/мин., массой от 3,5 до 6,5 кг (рис. 76).
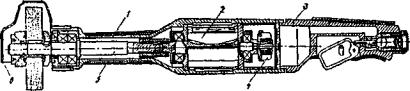
Рис. 76. Пневмошлифовальная ручная машина:
1 - корпус; 2 - пневмодвигатель; 3 - рукоятка; 4 - регулятор числа оборотов; 5 - шпиндель; 6 - кожух
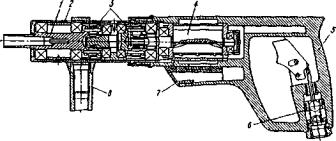
Рис. 77. Пневматическая сверлильная машина:
1 - шпиндель; 2 - корпус; 3 - регулятор; 4 - пневмодвигатель; 5 - рукоятка; 6 - пусковое устройство; 7 - глушитель; 8 - дополнительная рукоятка
Машины сверлильные пневматические (например, прямая ИП-1016А, угловая ИП-1103А) могут не только рассверливать отверстия диаметром до 32 мм, но и выполнять другие операции. Для этого служит комплект съемных насадок: сверло, щетка, абразивный круг, ножницы, гайковерт (рис. 77).
Для затяжки высокопрочных болтов применяют пневматические гайковерты ударно-реверсивного действия: прямые (ИП-3106Б, ИП-3123) и угловые (ИП-3205Б), обеспечивающие момент затяжки 800-1600 Н·м при диаметре болтов до 36 мм (рис. 78). Для натяжения высокопрочных болтов на контролируемые усилия используют ключи динамометрические ручные (рис. 79), а также гидравлические ключи КЛЦ-110 и КЛЦ-160, обеспечивающие момент затяжки 1050 - 1530 Н·м болтов диаметром 22 - 27 мм.
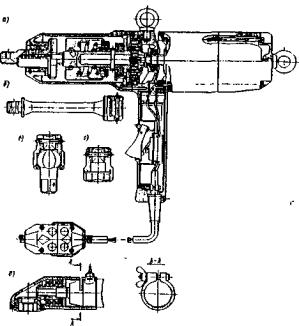
Рис. 78. Гайковерт с насадками:
а - гайковерт; б - удлинитель (торсион); в - шарнирный переходник; г - сменная головка; д - угловой переходник
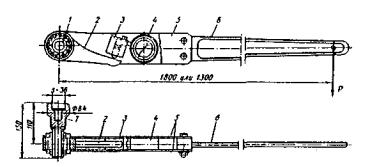
Рис. 79. Ключ динамометрический ручной:
1 - обгонная муфта; 2 - рычаг; 3 - гидроцилиндр; 4 - манометр; 5 - щеки; 6 - рукоять; 7 - головка под гайку
Имеются также машины, механизирующие труд по очистке, окраске поверхностей конструкций, сушке поверхностей, приготовлению мастик и других составов, нанесению мастик, раскатке и прикатке рулонных материалов при устройстве гидроизоляции и другие.
Но в целом надо еще много работать над совершенствованием механизации ручных трудоемких процессов.
10. ПЕРСПЕКТИВНЫЕ НАПРАВЛЕНИЯ РАЗВИТИЯ МОСТОСТРОИТЕЛЬНОЙ ТЕХНИКИ
Механизация трудовых процессов на строительстве мостов ни в коем случае не должна быть самоцелью. Во многих случаях сами процессы, а также применяемые материалы, конструкции и технологии являются устаревшими, сдерживающими технический прогресс и рост производительности труда. Конструкции, материалы, технологии и орудия труда являются неразрывно связанными между собой составляющими технического развития отрасли. Их надо рассматривать в комплексе.
Механизация - один из ведущих факторов повышения эффективности строительного производства. Усложнение мостостроительной технологии, подход к мостовым объектам как к конструктивно-технологическим системам в последние десятилетия определяют задачи модернизации существующих и создания новых машин.
К числу перспективных направлений развития мостостроительной техники относятся:
- расширение технологических возможностей машин за счет увеличения номенклатуры рабочего оборудования существующих машин и создания универсальных машин многоцелевого назначения, оснащенных широкой номенклатурой сменного рабочего оборудования;
- повышение единичной мощности машин;
- развитие специализации машин и рабочего оборудования, предназначенных для реализации гибких технологий строительства мостов;
- создание новых машин, обеспечивающих механизацию трудоемких ручных процессов;
- создание принципиально новых типов машин на базе достижении в области фундаментальных и прикладных наук (использование энергии взрыва, ультразвука, вибрационного и электрогидравлического эффекта, лазерной техники, высоких давлений, термического и химического способов и др.);
- развитие гидрофикации приводов машин;
- повышение мобильности сухопутных машин, в первую очередь, за счет применения пневмоколесного хода;
- интенсификация рабочего цикла машин путем увеличения скоростей исполнительных механизмов, автоматизации выполнения отдельных элементов цикла;
- повышение надежности и долговечности машин, улучшение их приспособляемости к техническому обслуживанию и ремонту;
- совершенствование приборов и аппаратуры для повышения безопасности работ и управления машинами;
- создание комфортных условий работы машинистов;
- разработка и совершенствование машин, предназначенных для эксплуатации в особых условиях.
В области агрегатов и оборудования для сооружения фундаментов мостовых опор действуют следующие основные тенденции:
- постепенная замена свайных дизель-молотов новыми, перспективными моделями гидромолотов, а электромеханических вибропогружателей - погружателями с гидроприводом;
- существенное сокращение применения рельсовых копров и переход на самоходные гусеничные копры, создаваемые на базе гидравлических экскаваторов, навесное оборудование на стреловые краны, создание и применение бескопровых установок для погружения свай, в том числе с молотами, имеющими массу ударной части 50-120 т;
- создание и внедрение механизмов для работ по срезке голов свай, разделке их под объединение с ростверком и т.п, выполняемых в настоящее время преимущественно вручную;
- более широкое применение и расширение типоразмерного ряда вибропогружателей и вибромолотов с регулируемой вынуждающей силой, снижение их электрической мощности, создание и применение наголовников с автоматическими захватами.
В ряду легких бурильных машин целесообразно появление многофункциональных бурильно-монтажных манипуляторных установок, оснащенных бурильным оборудованием, грузозахватными и другими устройствами. Заслуживает внимания зарубежный опыт производства модульных бурильных приставок с автономным приводом и оборудованием для обсадки труб, монтируемых на стреловых кранах.
Необходимо дальнейшее расширение области применения по грунтовым условиям средних и тяжелых бурильных машин, повышение их эффективности путем оснащения ударно-вращательным бурильным оборудованием, вакуумно-отсасывающими и охлаждающими установками.
Существенного расширения требует технология вибрационной укладки бетонных смесей при подводном бетонировании, в том числе с применением бетононасосов. Необходимо создавать мобильные комплекты оборудования.
В области стреловых кранов общего назначения преимущественное развитие получат краны на специальных шасси автомобильного типа высокой грузоподъемности (160-250 т) и проходимости, оснащенные телескопическими стрелами. Краны будут иметь приводы, позволяющие обеспечить широкое регулирование скоростей, мягкую и точную посадку грузов. Они будут снабжены манипуляторами, траверсами и захватами, обеспечивающими точную наводку и автоматическую установку монтируемых элементов в требуемое положение.
Тенденции в развитии специализированных кранов универсального и объектно-ориентированного применения диктуются перспективами гибких технологий возведения опор и пролетных строений различного типа. Создание новых, эффективных образцов кранов и специальных монтажных агрегатов оправдано в случае массового применения конструктивно-технологических решений.
Необходимо совершенствовать конструкции электрических лебедок, повышая их грузоподъемность и канатоемкость. Требует существенного расширения параметрический ряд гидродомкратов. Задачами совершенствования домкратного оборудования являются: создание компактных конструкций (например, сильфонного тина), повышение надежности домкратов, существенное увеличение хода поршня домкратов и производительности насосных станций.
Для удовлетворения потребности мостостроения в ручных машинах будет увеличена их номенклатура как за счет расширения рядов существующих машин, так и за счет создания новых рядов машин. Предусматриваются следующие направления развития ручных машин:
- освоение машин многоцелевого назначения, многоскоростных, с электронным регулированием скорости;
- расширение выпуска электрифицированных машин различных типов на базе коллекторных двигателей с двойной изоляцией;
- расширение номенклатуры машин, оснащенных твердосплавными и алмазными инструментами;
- дальнейшее снижение параметров шума и вибрации машин.
В целом же перспективное развитие механовооружения строительства мостов предусматривает решение следующих основных задач:
Внедрение в строительство прогрессивных технологических процессов, выполняемых современными высокопроизводительными машинами.
Завершение комплексной механизации основных строительных и монтажных процессов, переход от комплексной механизации отдельных видов работ к комплексной механизации сооружения объектов в целом.
Совершенствование структуры парка мостостроительных машин с целью максимального приближения ее к требованиям производства.
Совершенствование методов проектирования технологических процессов и систем механизации в ПОС и ППР, автоматизация разработки организационно-технологической документации.
СПИСОК ЛИТЕРАТУРЫ
1. Заленский В.С. и др. Машины для строительства и монтажа мостов / В.С. Заленский, Л.А. Бромберг, Ю.Л. Бромберг. - М.: Машиностроение, 1968.
2. Заленский В.С, Бромберг Ю.А. Машины для строительства и монтажа мостов . - М.: Стройиздат, 1971.
3. Добронравов С.С , Дронов В.Г. Строительные машины и основы автоматизации. - М.: Высшая школа, 2001.
4. Гальперин М.И. , Домбровский Н.Г. Строительные машины. - М.: Высшая школа, 1980.
5. Евдокимов В.А. Механизация и автоматизация строительного производства. - Л.: Стройиздат, 1985.
6. Кудрявцев Е.М. Комплексная механизация, автоматизация и механовооруженность строительства. - М.: Стройиздат, 1989.
7. Бобриков Б.В. и др. Строительство мостов / Б.В. Бобриков, И.М. Русаков, А.А. Царьков. - М.: Транспорт, 1987.
8. Организация, планирование и управление в мосто- и тоннелестроении /С.Р. Владимирский, Г.М.Еремеев, В.А. Милепин, В.Н.Смирнов; Под ред. С.Р. Владимирского. - М.: Маршрут, 2002.
9. Технология строительных процессов / А.А. Афанасьев, Н.Н. Данилов, В.Д. Копылов и др.; Под ред. Н.Н.Данилова, О.М. Терентьева. - М.: Высшая школа, 2001.
10. Строительные машины: Справочник: В 2 т. / Под общ. ред. Э.Н. Кузина. - М.: Машиностроение, 1991.
11. Стреловые самоходные краны и строповка грузов: Справочник/ Л.И. Ткач, Н.А. Слепчук, А.И. Носков и др. - М.: Металлургия. 1990.
12. Белецкий Б.Ф. Строительные машины и оборудование : Справочное пособие. - Ростов н/Д.: Феникс, 2002.
13. Добронравов С.С. Строительные машины и оборудование: Справочник. - М.: Высшая школа, 1991.
14. Поляков В.И. , Полосин М.Д. Машины грузоподъемные дли строительно-монтажных работ : Справочное пособие. - М.: Стройиздат, 1993.
15. Владимирский С.Р. Системы механизации строительства мостов ,- СПб.: Папирус, 1998.
16. Пащенко В.А. Заводское изготовление мостовых железобетонных конструкции . - М.: Транспорт, 1972.
17. Мамлин Г.А. Производство конструкции стальных мостов . - М.: Транспорт, 1994.
18. Владимирский С.Р. Современные методы проектирования мостов ,- СПб.: Папирус, 1998.
19. СНиП 3.01.01-85* . Организация строительного производства / Госстрой России. - М.: ГУП ЦПП, 2000.
20. Кручинкин А.В. и др. Машины, механизмы и оборудование для строительства мостов : Справочник: В 2 т. /А.В. Кручинкин, В.В. Васильев, Ю.Н. Переляев. - М.: ЦНИИС, 1993.
21. Новожилов Г.Ф. Бездефектное погружение свай в талых и вечномерзлых грунтах . - Л.: Стройиздат, 1987.
22. СНиП 2.02.03-85 . Свайные фундаменты / Госстрой СССР. - М.: ЦИТП Госстроя СССР, 1986.
23. Растегаев И.К. Машины для вечномерзлых грунтов. - М.: Машиностроение, 1986.
24. Вейнблат Б.М. и др. Краны для строительства мостов: Справочник / Б. М. Вейиблат, И. И. Елинсон, В. П. Каменцев. - М.: Транспорт, 1988.
25. Специальные вспомогательные сооружения и устройства для строительства мостов . Нормы и правила проектирования ( СТП 136-99). - М.: ОАО «Институт Гипростроймост», 1999.
26. Телов В.И., Кануков П.М. Наплавные мосты, паромные и ледяные переправы . - М.: Транспорт, 1978.
Приложение
ПЛАШКОУТЫ ДЛЯ УСТАНОВКИ СУХОПУТНОЙ ТЕХНИКИ И ТРАНСПОРТНЫЕ ПЛАШКОУТЫ
При строительстве больших мостов через глубоководные реки возникает необходимость использовать сухопутные краны и копры, установленные на плавучие средства, а также транспортные плашкоуты для перевозки различных грузов (см. разделы 6 и 7). Ниже изложены основные технические требования и методики расчета указанных плавучих средств (см. [25]).
Проектирование плавучих средств для установки сухопутной техники и перевозки грузов следует производить с учетом данных о режиме реки в районе строительства моста. Необходимо учитывать: глубину воды, скорость и направление течения, высоту волн при различных скоростях и направлениях ветра, отметки уровней воды и др. Принимают во внимание также режим судоходства и лесосплава, преимущественное направление и скорость ветра, температурный режим.
Плашкоуты следует, как правило, комплектовать из инвентарных металлических понтонов закрытого типа (см. раздел 7). Разрешается использование металлических палубных барж при достаточной прочности и жесткости их корпуса на действие сил, возникающих при перевозке и работе. В необходимых случаях, определяемых расчетом, корпус понтонов и барж необходимо усиливать дополнительными металлоконструкциями.
При устройстве плавучей опоры из нескольких барж их следует жестко соединять между собой в поперечном направлении.
Плашкоуты из понтонов следует применять преимущественно прямоугольного очертания в плане, располагая понтоны симметрично относительно ости опорного давления. Понтоны типа КС при соединении их в плашкоуты следует располагать продольной стороной в направлении действия наибольшего изгибающего момента. Плашкоут должен иметь в плане минимум два понтона, установленных вдоль плашкоута, и минимум два поперек его. В целях безопасности не допускается применять одиночные понтоны. Понтоны рекомендуется устанавливать в плашкоут плашмя, т.е. с высотой борта 1,8 м.
При использовании барж следует руководствоваться их паспортными данными и исполнительными чертежами, с учетом результатов натурного обследования состояния барж. При выборе барж кроме того нужно учитывать следующие требования:
- максимальную длину барж рекомендуется принимать не более 50 м;
- грузоподъемность барж принимать не менее чем на 25% больше расчетной нагрузки на них;
- при образовании плавсистемы из нескольких барж последние должны быть однотипные и одинакового водоизмещения.
Установка копров и кранов на плашкоуты рекомендуется при запасе глубины воды под днищем более 0,6 м с учетом возможного колебания уровня воды в водоеме (методика определение максимальной осадки плашкоута приведена ниже).
Размеры и конструкция плашкоутов в плане при установке на них копра назначаются в зависимости от принятой технологии сооружения фундамента опоры, последовательности погружения свай и размеров опоры. На плашкоутах допускается как бортовая (на одном плашкоуте), так и центральная установка копров на мостике или портале, опирающихся на два плашкоута, располагаемых с зазором (см. рис. 11). В последнем случае плашкоуты должны иметь в носу и корме съемное жесткое раскрепление по палубе.
Бортовая установка копра рекомендуется для всех свайных молотов, которые в рабочем положении закрепляются на голове сваи. Бортовая установка позволяет свободное передвижение плашкоута вдоль забиваемого ряда свай (при отсутствии шпунтового ограждения). При этом необходимо уравновешивание плавсистемы балластировкой плашкоутов или установкой контргрузов (противовесов) для приведения стрелы копра в вертикальное либо наклонное положение, определяемое углом забивки свай.
Центральная установка копра на мостиках или порталах при расположении молота над центром расчетной площади ватерлинии обоих плашкоутов является предпочтительной, так как в этом случае устойчивость копра наибольшая.
Размеры и расположение плашкоутов и их балластировка (расположение контргрузов) подбираются так, чтобы обеспечить плавучесть и остойчивость плавсистемы. При этом стрела копра во время забивки была вертикальной или имела заданный наклон.
Высота обстройки верха плавсистемы должна быть увязана с отметкой верха свай после их забивки.
Козловые краны следует устанавливать на два плашкоута, устанавливаемых с промежутком между ними (в котором обычно и располагается котлован опоры с ограждением). В этом случае установка козлового крана на плашкоуты и раскрепление их между собой выполняются аналогично случаю установки копра на мостике или портале. Возможна также установка крана на едином плашкоуте, имеющем центральное отверстие для сооружения опоры. В этом случае должно быть предусмотрено место для захода под кран транспортных плашкоутов, а также съемная секция плавсистемы для вывода ее с опоры.
При установке на плашкоуте крана с поворотной стрелой ширину плашкоута следует назначать исходя из того, чтобы при подъеме наиболее тяжелого груза при необходимом вылете стрелы, направленной перпендикулярно к продольной оси плашкоута, угол крена плашкоута не превышал предельного угла наклона крана, взятого по паспортным данным.
Длина плашкоута и вес постоянного контргруза (твердого балласта), располагаемого в кормовой части плашкоута, должен назначаться исходя из того, чтобы при подъеме наиболее тяжелого груза при необходимом вылете стрелы, направленной вдоль продольной оси плашкоута, дифферент на нос был равен дифференту на корму при нерабочем положении крана. При этом угол дифферента не должен превышать предельного угла наклона крана.
Плашкоут с копром (краном) во время работы должен быть расчален не менее чем в четырех направлениях к якорям, заложенным на берегу, к якорям, уложенным на дно, или к ранее забитым сваям (пример см. на рис. 52).
При установке копров и козловых кранов на двух раздельных плашкоутах связи между ними должны быть рассчитаны на усилие от расчалок при транспортировке и разворотах плавсистемы с помощью якорных лебедок. При этом в расчете следует учитывать наличие поперечных связей между плашкоутами только с одной стороны (носовой, кормовой) стороны.
Все плашкоуты должны оборудоваться не менее чем четырьмя ручными якорными лебедками с запорными устройствами (киповыми планками), установленными по углам плашкоута. Кроме того, должны иметься причальные приспособления (кнехты, кранцы, отбойные брусья), леерное ограждение по всем бортам и спасательные средства. На плашкоуты устанавливают также насосы для водоотлива из трюма. На углах плашкоута должны быть нанесены несмываемой краской водомерные рейки (ноль рейки соответствует уровню днища). Транспортные плашкоуты должны иметь нанесенную несмываемой краской ватерлинию, располагаемую на 0,5 м ниже уровня палубы.
При проектировании плавучих средств для размещения на них стреловых и козловых кранов, копров, а также перевозки грузов необходимо выполнить следующие расчеты [25], [26]:
1) по первой группе предельных состояний (на расчетные нагрузки):
- плавучести системы;
- остойчивости системы;
- прочности и устойчивости корпуса судна, распределительных ростверков и других элементов усиления судового набора;
- мощности тяговых средств и якорных закреплений;
2) по второй группе предельных состояний (на нормативные нагрузки):
- по деформациям (осадка, крен, дифферент);
- объема и размещения противовесов из условия допустимого для данного крана или копра крена (дифферента) плашкоута.
Креном судна называется поперечное отклонение палубы от горизонтального положения в сторону одного из его бортов (левого пли правого), дифферентом - отклонение палубы в сторону носа или кормы.
Нагрузки и их сочетания для расчета плавучих средств под крапы и копры принимаются по указанию табл. 23.
Плавучие средства проверяют на плавучесть по условию
γΣV п ≥ ΣQ k н (41)
где γ - объемная масса воды, равная для пресной воды 1 т/м3; Σ V п - предельное водоизмещение плавучей системы, равное ее суммарному водоизмещению при осадке, равной высоте борта по миделю; ΣQ - расчетный вес плавучей системы, равный сумме расчетных весов: плашкоута с обстройкой, крановой (копровой) установки, регулировочного и остаточного балласта; k н - коэффициент надежности, принимаемый равным: при установке на плашкоутах копров и стреловых кранов k н = 2, при установке на плашкоутах козловых кранов и при перевозке грузов - kн = 1,25.
Таблица 23
Нагрузки и их сочетания при расчете плавучих средств
|
Нагрузки и воздействия |
Сочетания нагрузок |
|||
|
при расчете прочности плашкоутов |
при расчете плявучести и остойчивости |
|||
|
1 |
2 |
3 |
4 |
|
|
Собственный вес плашкоута с обстройкой |
+ |
+ |
+ |
+ |
|
Вес крана, копра и другого оборудования |
+ |
+ |
+ |
+ |
|
Вес подвешенного к крану груза (молота, свай к копру): |
|
|
|
|
|
- без динамики |
- |
- |
+ |
- |
|
-с динамикой |
+ |
- |
- |
- |
|
Вес противовесов и балласта |
+ |
+ |
+ |
+ |
|
Давление ветра: |
|
|
|
|
|
- на плашкоут |
+ |
+ |
+ |
+ |
|
- на кран (копер) |
+ |
+ |
+ |
+ |
|
- на груз (сваю) |
+ |
- |
+ |
- |
|
Гидростатическое давление воды |
+ |
+ |
+ |
+ |
|
Волновая нагрузка |
+ |
- |
- |
- |
Примечания. 1. В сочетаниях 2 и 4 интенсивность ветровой нагрузки принимается равной расчетной для данного района; в сочетаниях 1 и 3 - при скорости ветра V=10 м/с.
2. В сочетаниях 1 и 3 центр тяжести груза должен приниматься в точке подвеса его к крану (копру) в сочетании с наиболее невыгодным положением крана (копра) на плашкоуте.
3. В сочетаниях 1 и 3 рассматривается также случай обрыва груза с крана (копра). В этом случае вес груза условно прикладывается к стреле снизу вверх.
4. При расчете плашкоутов для кранов необходимо в сочетаниях 1 и 3 рассмотреть случаи: а) наибольшей высоты подъема груза; б) наибольшего вылета поднимаемого груза.
Объем остаточного балласта определяется для барж в зависимости от конструкции набора днища, а для понтонов типа КС принимается, исходя из средней толщины слоя воды в каждом понтоне 0,1 м.
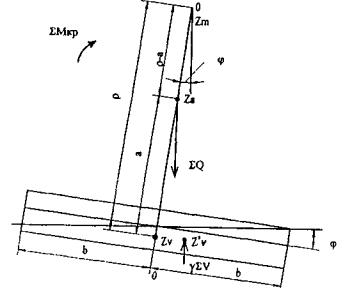
Рис. 80. Схема к проверке остойчивости плавучей системы
Остойчивость плавучей системы определяется следующими условиями (рис. 80):
а) метацентрическая высота ρ - α должна быть положительной ни всех расчетных случаях, т.е.
ρ-α>0 , (42)
где ρ - метацентрический радиус, равный расстоянию между центром тяжести вытесненного объема воды (центром водоизмещения Z v ) и метацентром Zm, расположенным в точке пересечения вертикали, проходящей через смещенный центр водоизмещения, с осью О-О плавучей системы; а - расстояние от центра тяжести плавучей системы Za до центра водоизмещения Zv, принимаемое равным тому же расстоянию при начальном положении плавсистемы.
б) при крене и дифференте плавучей системы от действия расчетной ветровой нагрузки кромка палубы в любой точке не должна уходить под воду, а днище (середина скулы) не должно выходить из воды.
При проверке остойчивости все нагрузки должны приниматься расчетные. Значение коэффициента надежности по нагрузке для собственного веса плашкоута с обстройкой и оборудованием следует принимать в их невыгодном значении (0,9 или 1,1).
Значение метацентрического радиуса определяется по формуле
ρ = (I- Σ in)/ Σ V p . (43)
где I - момент инерции площади плашкоута (баржи) в уровне ва терлипии относительно оси наклонения плавучей системы, принимаемый при кренах - относительно оси с меньшим моментом инерции, а при дифферентах - относительно оси с бульшим моментом инерции площади; Σ in - сумма собственных моментов инерции поверхности балласта в понтонах (отсеках барж) относительно осей, проходящих через центры тяжестей этих поверхностей, параллельно осям наклонения плавучей системы; ΣV p - объем (водоизмещение) погруженной части плавсистемы.
Осадку плавучей системы от вертикальных нагрузок определяют по формуле
t в = ΣQ/(k в Ω), (44)
где Σ Q - расчетная (или нормативная - см. ниже) нагрузка, приходящаяся на плавсистему; k в - коэффициент полноты водоизмещения, принимаемый для понтонов типа КС равным 0,97; Ω - площадь плашкоута по ватерлинии.
Осадка барж определяется по паспортным данным в зависимости от расчетной нагрузки на баржу.
Для контроля за фактической осадкой плавучих систем в рабочих чертежах должны указываться осадки от нормативных нагрузок.
Максимальная осадка от расчетных нагрузок, вызывающих крен или дифферент плавучей системы, определяется по формуле
t г = b tg φ , (45)
где b - половина размера плашкоута; φ - угол крена или дифферента.
Для плавучих систем рассматриваемого типа угол крепа или дифферента можно рассчитать по формуле
 (46)
(46)
где ΣМ п - расчетный момент от постоянных нагрузок; ΣM вр - расчетный момент от временных нагрузок; m - коэффициент условий работы, принимаемый равным 1,2.
Расчетный момент ΣМ п от постоянных нагрузок принимается относительно осей симметрии площади плашкоута (при полном уравновешивании веса кранов или копров ΣМ п = 0).
Расчетный момент ΣМ вр принимается от горизонтальных ветровых нагрузок относительно центра водоизмещения. Сюда же входят неуравновешенные части вертикальных нагрузок (веса груза на крюке крана, сваи на стреле копра и т.п).
Угол φ должен удовлетворять условиям:
φ≤φ 1 ; φ ≤ φ 2 , (47)
где φ1 и φ2 - угол крена (дифферента), соответствующий началу входа кромки палубы в воду и выходу из воды днища (середины скулы).
Расчет на прочность корпуса судна производят с использованием линий влияния изгибающих моментов М и поперечных сил Q. Ординаты линий влияния определяются из общих выражений (см. [26] и рис.81):
![]() (48)
(48)
![]() (49)
(49)
где v =( ρ - a )/ ρ =1- a / ρ .
В этих формулах первые члены учитывают изменение усилий за счет дифферента плавсистемы. Второе слагаемое формул образуется за счет эпюры qp - сил поддержания воды при центральном загружении плавсистемы силой Р = 1. Третий член учитывает непосредственное воздействие силы Р = 1 или момента, ею создаваемого М = 1·хр, и действителен только при положении единичной силы левее сечения, для которого строится линия влияния.
Анализ формулы (48) показывает, что наибольшие изгибающие моменты в сечении корпуса под сосредоточенным грузом действуют при хп = 0, т.е в миделе судна (см. рис. 81, г). Для любого числа сосредоточенных грузов Р, на палубе изгибающий момент от них в среднем сечении корпуса будет выражен формулой
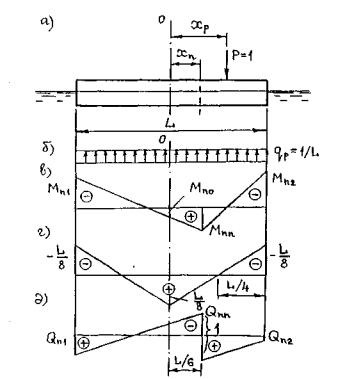
Рис. 81. Линии влияния для плавучей системы:
а - расчетная схема; б - эпюра сил поддержания воды; линии влияния: в - М L /3 ; г - М0; д - Q L /3
![]() (50)
(50)
где х i - абсолютная величина расстояния от миделя до точки приложения нагрузки Р i .
Из анализа формулы (49) следует, что ординаты линии влияния Q0 в миделе равны ±0,5, а по концам плашкоута (при х n = L/2) равны нулю.
Изложенная методика расчета судна на прочность относится к его положению на спокойной воде. Кроме этого, необходимо учитывать дополнительные изгибающие моменты ΔМ и поперечные силы Δ Q от волновой нагрузки:
ΔM = ±k0k1k2k6BL2h; (51)
ΔQ = 4M/L, (52)
где k6 - коэффициент полноты водоизмещения; В - ширина плашкоута в уровне ватерлинии по миделю; L - длина плашкоута в уровне ватерлинии; h - расчетная высота волны во время работы, м.
Расчетную высоту волны принимают на основании данных местного пароходства и в расчете берут не менее 0,6 м.
Коэффициент k 0 вычисляется по формуле
k 0 = 1,24-2B/L. (53)
Коэффициент k1 в зависимости от длины судна L принимается равным
при длине судна 20 м - 0,0123;
при длине судна 40 м - 0,0101;
при длине судна 60 м - 0,0085;
при длине судна 100 м - 0,0061.
Коэффициент k 2 вычисляется по формуле
k 2 = 2-20T н /L , (54)
где Тн - осадка судна носом, м.
Эпюры дополнительных усилий в корпусе плашкоута от волновых воздействий изображены на рис. 82.
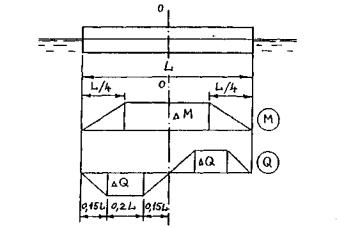
Рис. 82. Эпюры дополнительных усилий в корпусе судна от волновых воздействий
Мощности тяговых средств (буксиров, транспортирующих плав-систему) определяется по формулам ( 31) - ( 35).
Лебедки и якоря для перемещения и раскрепления плавучих систем следует рассчитывать на сочетания нагрузок, приведенных в табл. 24.
Таблица 24
Нагрузки и их сочетания при расчете лебедок и якорных закреплений
|
Расчетные нагрузки |
Расчет лебедок |
Расчет якорей |
||||
|
верховой ветер |
низовой ветер |
поперечный ветер |
верховой ветер |
низовой ветер |
поперечный ветер |
|
|
Ветровая нагрузка расчетной интенсивности W P |
- |
- |
- |
+ |
+ |
+ |
|
Ветровая нагрузка при скорости ветра V = 10 м/с |
+ |
+ |
+ |
- |
- |
- |
|
Гидродинамическое давление на подводную часть плавучей системы максимальное N max |
+ |
- |
+ |
+ |
- |
+ |
|
Гидродинамическое давление на подводную часть плавучей системы минимальное N min |
- |
+ |
+ |
- |
+ |
+ |
Примечание: поперечный ветер действует поперек течения.
Якоря и якорные канаты следует рассчитывать на горизонтальные усилия, определяемые по формулам:
для верховых закреплений
S в = Wp + N max ; (55)
для низовых закреплений
S н = Wp - N min (56)
где W p , N m ax , N m i n соответствуют формулам ( 31) - ( 35).
Минимальная длина якорного каната (расчалки) l m i n (в м) определяется из условия, чтобы канат походил к якорю горизонтально (рис. 83). Для этого длина якорных канатов принимается не менее 10-15 наибольших глубин воды на закрепляемом участке.
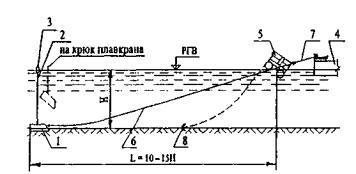
Рис. 83. Схема якорного закрепления плашкоута:
1 - железобетонный якорь-присос; 2 - строп; 3 - якорный буй; 4 - плашкоут; 5 - якорный плот с плавучим рымом; 6 - папильонажный канат; 7 - якорный канат (расчалка); 8 - весовой якорь (положение до сростки якорного и папильонажного каната)
Коэффициент
надежности по назначению для стальных канатов принимают γ n
= 3,5 по отношению к разрывному усилию каната в целом. Ориентировочный диаметр
каната (в см) можно определить по простой зависимости ![]() , где S' берется в
тс, и определяется по формуле
, где S' берется в
тс, и определяется по формуле
S ' = S/ cos α , (57)
где α - угол в плане между направлением течения реки и расчалкой (см. рис. 52).
Горизонтальное усилие на якорь адмиралтейского типа допускается принимать в пределах 5-6 весов якоря при песчаных и 8 - 12 весов якоря - при глинистых грунтах.
Горизонтальное усилие на железобетонный якорь-присос допускается принимать в пределах 1,3-1,6 весов якоря, но не более 70% предельного усилия, установленного при испытании якоря.
Пример 5 . Выше в примере 2 для забивки железобетонных призматических свай сечением 35×35 см длиной 12 м (q2 = 3,6 тс) подобран гидромолот Junttan марки ННК-4 с массой ударной части 4,0 т ( q 1 = 6,3 тс). Произведем расчет плавучей системы для установки гусеничного копра РМ-20 фирмы Junttan (вес копра Рк = 40 тс = 392 кН), предназначенного для работы данного молота. Работы ведутся в IV ветровом районе (по карте районирования территории России СНиП 2.01.07-85*). Ширина зеркала воды в межень 440 м, скорость течения воды - 0,5 м/с. Расчетная высота волн - 1,0 м.
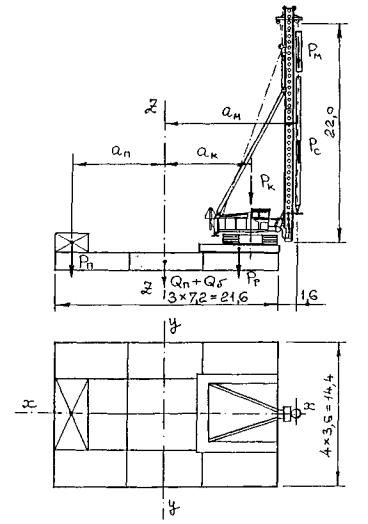
Рис. 84. Общий вид и расчетная схема плавучей системы с копром РМ-20 на 12 понтонах КС-63 (к примеру 5)
Для установки копра примем плашкоут из 12 понтонов КС-63 (3×4 шт.) размерами в плане 21,6×14,4 м, высотой борта 18 м (рис. 84).
Определим необходимый вес противовеса (регулировочного сухого балласта) исходя из условия, чтобы при копре с подвешенным молотом в рабочем состоянии (свая установлена в направляющие, ее вес не действует на копер) стрела копра была вертикальной, т.е. дифферент плавсистемы равен нулю:
ΣМ z = 0; Р п· a п -Рк·ак-Р м ·а м -Рр·ар = 0,
где Рр = 40 кН - вес металлической рамы под копер.
Отсюда
Р п = (Рк·ак+Р м·а м+Рр·ар)/а п = (392×8,0+61,8×12,4+40×7,2)/9,0 = 466 кП.
Принимаем противовес из железобетонных плит объемом V п = 466/(9,81×2,4) = 20 м3.
Определим полный вес плавсистемы:
вес понтонов - Q п = (6,28+0,52)×9,81×12 = 800 кН;
вес остаточного балласта - Qo.б. = 21,6×14,4×0,1×9,81×1,0 = 305 кН;
веса копра с рамой, молота и сваи указаны выше.
ΣQ = 800+305+466+392+61,8+40+35 = 2100 кН.
Проверим плавсистему на плавучесть по формуле (41):
γΣV п = 1,0×9,81×12×45×0,9 = 4767 кН,
где γ f = 0,9 - коэффициент надежности по нагрузке;
ΣQkн = 2100×2,0×1,1 = 4620 кН,
где γ f = 1,1 - также коэффициент надежности по нагрузке.
Условие ( 41) выполняется, т.е. γΣV п > γΣkн.
При расчете плавсистемы на остойчивость вначале по формуле ( 44) определим среднюю осадку плашкоута:
t в = 2100×1,1/(0,97×21,6×14,4×9,81) = 0,78 м.
Положение центра тяжести плавсистемы найдем из уравнения суммы статических моментов всех сил относительно уровня днища плашкоута:
а = (800×0,9+305×0,05+466×2,3+392×7,0+61,8×16+40×2,1+35×8,0)/2100-0,78/2 = 2,42 м.
Моменты инерции плашкоута относительно осей х и у равны:
I х = 21,6×14,43/12 = 5374 м4;
I у = 14,4×21,63/12 = 12093 м4.
По формуле ( 43) определяем метацентрические радиусы (так как балластируемых понтонов в данном случае нет, Σ in = 0):
ρх = 5374/235,3 = 22,8 м;
ρу = 12093/235,3 = 51,4 м,
где ΣVp = 21,6×14,4×0,78×0,97 = 235,3 м3.
Проверяем остойчивость плавсистемы по условию ( 42):
ρ min -а = 22,8-2,42 = 20,38 м > 0,
т.е. остойчивость обеспечивается.
Далее рассчитаем углы крена и дифферента плавсистемы по формуле ( 46). При этом имеем в виду, что поперечный крен постоянной нагрузкой не вызывается.
Согласно СТП 136-99 [25] нормативная ветровая нагрузка для IV ветрового района составляет w 0 = 0,48 кН/м2.
Значения коэффициента k , учитывающего изменение ветрового давления по высоте от уровня воды, составляют:
для плашкоута - 0,75;
для копра - 1,0;
для стрелы, молота, сваи - 1,25.
Аэродинамические коэффициенты для всех элементов, имеющих в данном случае сплошное прямоугольное сечение, с = 1,4.
Значения средней ветровой нагрузки, действующей поперек плавсистемы (без пульсационной составляющей, которая в данном случае не известна):
на плашкоут -
W 1 = w0kc = 0,48×0,75×1,4×21,6×(1,8 - 0,78) = 11,2 к11;
на копер - W2 = 0,48×1,0×1,4×7×4 = 18,8 кН;
на стрелу - W3 = 0,48×1,25×1,4×1,0×22 = 18,5 кН;
на молот - W4 = 0,48×1,25×1,4×145 = 4,2 кН;
на сваю - W5 = 0,48×1,25×1,4×0,35×12 = 3,5 кН.
Сумма моментов от поперечных ветровых нагрузок (рис. 85):
ΣМ вр = 11,2×(1,8-0,78)/2+18,8×3+18,5×12+4,2×15++ 3,5×6,5 = 370 кН·м.
По формуле (46):
![]()
Дополнительная осадка, вызванная креном (формула ( 45)):
tx = 14,4×0,0104/2 = 0,075 м.
Как видим, дополнительная осадка в 75 мм не столь значительна. Отклонение оси сваи от вертикали на угол 0,01 также находится в допустимых пределах.
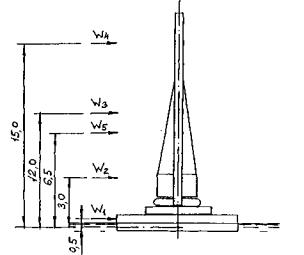
Рис. 85. Расчетная схема действия ветровой нагрузки при расчете плавсистемы на устойчивость
Значения средней ветровой нагрузки, действующей вдоль плавсистемы:
на плашкоут - W 1 = 14,4×11,2/21,6 = 7,5 кН;
на копер - W2 = 5×18,8/7 = 13,4 кН;
на стрелу - W3 = 18,5 кН;
на молот - W4 = 0;
на сваю - W5 = 0.
Сумма моментов от постоянных нагрузок:
ΣМ п = -466×0,9×9+(392×8+61,8×12,4+40×7,2)×1,1 = 837,5 кН·м.
Сумма моментов от временных нагрузок (включающих ветровые нагрузки и вес сваи):
ΣМ вр = 7,5×(1,8-0,78)/2+13,4×3+18,5×12+3,5×12,4×1,1 = 313,8 кН·м.
По формуле ( 46):
![]()
Дополнительная осадка, вызванная дифферентом:
ty = 21,6×0,0112/2 = 0,121 м.
Условия ( 47) соблюдены, так как по дифференту φ1 = φ2 = 2×(1,8-0,78)/21,6 = 0,094.
Далее рассчитаем корпус судна на прочность.
Наибольший изгибающий момент и поперечную силу в миделе определим по формуле ( 50):
M0 = [γ fp P п ×(L-4а п)+γ fp ×(1+ m )×Рк×( L -4ак)+γ fp ×(1+m)×(PM+P c )×
×( L -4 a м )+γ fp Е P р ×( L -4 a р )]/8 = [1,1×466×(21,6-4×9,0)+
+1,1×1,2×392×(21,6-4×8,0)+1,1×1,2×(61,8+35)×(21,6-4×
×12,4)+1,1×40×(21,6-4×7,2)]/8 = -2083 кН·м;
Q 0 = 1,1×466×(0,5-9,0/21,6) = 43 кН.
Для определения дополнительного изгибающего момента от волновых воздействий вначале определим коэффициенты в формуле ( 51):
k 0 = 1,24-2,0×14,4/21,6 = -0,093;
k 1 = 0,012;
k 2 = 2-20×0,77/21,6 = 1,287.
По формулам ( 51) и ( 52) определяем дополнительный изгибающий момент и поперечную силу в миделе судна при высоте волн 1,0 м:
ΔМ = -0,093×0,012×1,287×0,97×14,4×21,62×1,0×9,81 = -91,8 кН·м;
ΔQ = 4×91,8/21,6 = 17 кН.
Суммарный изгибающий момент, действующий в одном понтоне:
M ' = (М0+ΔM)/4 = (-2083-92)/4 = -544 кН·м.
Суммарная поперечная сила, приходящаяся на один понтон:
Q ' = ( Q 0 +Δ Q )/4 = (43+17)/4 = 15 кН
По графику на рис. 59, точка с координатами (М ', Q ') находится внутри предельной кривой, т.е. прочность корпуса судна обеспечена.
Наконец, рассчитаем мощность якорного закрепления плашкоута, имея в виду, что наибольшие усилия приходятся на верховые якоря.
Ветровая нагрузка расчетной интенсивности уже определена ранее при расчете на остойчивость (поперек плавсистемы, так как при работе плашкоут развернут большей стороной поперек течения реки):
Wp = ΣW i = 11,2+18,8+18,5+4,2+3,5 = 56,2 кН.
Лобовое давление воды по формуле ( 33) при скорости течения воды 0,5 м/с
Nл = 500×1,0×21,6×0,78×0,52 = 2106 Н.
Подсчитаем силу трения воды по поверхности подводной части плашкоута по формулам ( 34), ( 35):
N т = 0,17×21,6×(2×0,78+14,4)×0,52×9,81 = 144 Н.
Кроме того, учитываем нагрузку от волновых воздействий 300 Н/м для реки шириной до 500 м.
Суммарная гидродинамическая нагрузка на подводную часть плашкоута
N max = 2106+144+300×21,6 = 8730 Н.
Максимальная нагрузка на верховое якорное закрепление по формуле ( 55):
S в = 56,2+8,7 = 64,5 кН.
Усилие в одном канате расчалки при угле α = 30° по формуле ( 57)
S ' = 64,5/(2×cos 30°) = 37 кН .
Ориентировочный
диаметр каната ![]()
Железобетонный якорь-присос берем весом Q л = 3,7/1,5 = 2,5 тс.