Методические указания Методические указания по применению наземной стереофотограмметрической съемки на изысканиях дорог
В СЕ СОЮЗНЫЙ НАУЧНО- ИССЛ ЕДОВ АТЕЛЬСКИЙ ИНСТИТУТ
ТРАНСП ОРТНОГО СТРОИТЕЛЬС ТВА
МЕТОДИЧЕСКИЕ
УКАЗАНИЯ
ПО ПРИМЕНЕНИЮ НАЗЕМНОЙ
СТЕРЕОФ ОТО ГРАММ ЕТРИЧЕ СКОЙ
СЪЕМКИ НА ИЗЫСКАНИЯХ Д ОРОГ
Под редакцией канд. техн. наук С.А. Бутлера
Мо скв а 19 72
ПРЕДИСЛОВИЕ
При в ы полне нии топографо-геодези чески х раб от в процессе произ водс тва изы сканий же лезн ых и автомоби льн ых дорог стереоф от ограмметрические мет оды использ уютс я как средс тво выс окоп роизво дительного получения объект ивной информ ации о мес тности. В последние годы эти методы н аходят все б олее ши рокое примен ени е для получен ия чис ленной информации в ф орме, пригодн ой дл я не пос редст ве нно го использов ан ия в проек тных рас четах на ЭВМ .
Обработка ре з ультат ов изм ерений на ЭВМ с п рим ене нием мет одов аналитичес кой ф отограммет ри и поз воляет рас ширить с феру раци онального прим енения назем ной стереофо тограмметри ческ ой съемки в инже нерных изы сканиях.
В с вязи с существе нным из мене нием ме тодики поле вых работ и к амеральн ой обработки м ат ериалов воз никла необходим ость переработки «М етоди ческих указ аний» , из данных в 1 962 г., примените льн о к использованию приборов оптико-ме хани ческого типа и ЭВМ .
Настоящие «Ме тодичес кие указ ания» раз работ аны канд. те хн. н аук Б.К. Малявским, при учас тии канд. т ехн. н аук Г.П. К удрявцева, на основе теорети чес ких и эксперимен тальны х исследований, выполненны х от делением изысканий и проектирования ЦН ИИ Са.
Зам. д иректора институт а (И. Наседкин)
Руководитель отделен ия изы ск аний и п рое кт ирования (Г. Верцман)
I . ОБЩИЕ ПОЛОЖЕНИЯ
1 .1 . Наземную с тереофотог рамм етрическ ую съе мку применя ют при изысканиях новых и реконс тру кци и с уще ств ующих ж елез ны х и а втом обильны х д орог, глав ным об разом в горных район ах на стадии с ос тавления технического проекта и рабочих че рте жей.
1 . 2. При и з ысканиях трасс и сооружениях на них ст ереофотосъемку произ водят на отде льных наиболее сложных учас тках изучаем ой местности, а им енно:
а) с кальных п риж имах и к рут окосого рных учас тках;
б) к рутых м орс ких и речных бе регах;
в) осыпях и оползневых уча с тка х;
г) подходах к тоннел я м.
1 .3. П ри использ овании в проце ссе из ыс каний в горных районах аэрофотосъем ки назе мную стереоф отосъе мку приме няют для полу чения круп ном асштабных топограф ичес ких планов на участках, где аэрофотосъ емочные мате риал ы не обеспечивают н еоб ходимой детализа ции и с тепени точн ости, а та кж е для создания планово-высотно го обоснован ия мат ериалов аэ рофотос ъем ки.
1 .4. Материа лы наз емной с тереос ъемки использую т для с оста влен ия в к амеральных ус лови ях крупномас штабных топографичес ких план ов, а также дл я соз дания на основе из мере ний по стереомодели ме стности горизонтальных и наклонных продольны х разрезов, продольных и попе речных профилей по з аданным направления м в процесс е проектировани я трасс ы. Положение трасс ы на ос обо сложных труднодос ту пны х прижимных участках ра зраб атыва ют к аме рально по материалам наз емной с тере осъем ки.
1 .5. При обсл едовании района из ыс каний фо тогеол оги ческим ме тодом и нженерно-г ео логи ческое дешифрирован ие аэросним ков выпол няют с исп ользован ием соответствующих и м наземных фототеодолитных снимков.
1 .6. Материа лы назем ной стереофо тосъемки ис пользуют для определения в камеральн ых ус ловиях геодез ическ их координат э лем ентов путевого развития и ситуации железнодорожных с танций, с ос тавле ния круп номасштабны х топографическ их пла нов плоских уча стков местности и отвес ных м орских и речных бере гов, а такж е для пос троения на основе из мерений по стереомодели местности прод оль ны х и поп еречны х профилей.
1 .7. Пространстве нные координа ты точек м естности при наз емной стереофо тос ъемке получают пря мой засечкой с базис а фотографирова ния. Для этого участок местности, подлежащий съемке, фотографируют с двух точек - концов базиса фо тографи ров ания (рис. 1).
Рис. 1
Для обеспечени я с оответств ующей точности фиксирования положе ния точек на снимк ах фото гра фируют с пец иальными фотокам ерами ж есткой кон струкции (см. п риложения 1 и 2).
Перед фотографированием м ес тности к амеры ориенти руют в пространстве с помощью специа льного о рие нти рн ого приспособления и уровней, а т акже опреде ля ют величин у и нап ра вле ние баз иса фотог рафи ров ания .
В з а ви симости от задач , ви да об ъект а с ъем ки и п ос ледую щей мето дик и к ам ерал ьн ой обра ботки ст ереоф отограмметри ческую съемку можно выполнять п ри строго фиксированном или приближе нном ориентировании камеры в прост ранстве.
1 .8 . П олевые рабо ты при наземной стереофотосъемке заключаются в рекогносцировке участка съемки, вы боре полож ения ба зи сов фотог рафирован ия, измерения их длин и аз имутов, определени я ге одез ических ко орди нат центров фотографирован ия и конт рольны х точек на участке съемки. Завершают поле вы е раб оты после довательным фо тографи рован ием у част ка со все х нам еченных точек съ ем ки.
1 .9. Кам еральную обработку сн им ков наземн ой стереофо тосъемки выполня ют оптико-механи че ским или аналитическим путем. В пе рвом сл учае ис поль зуют приборы т ипа стереоавто графа, стереопланиграфа или стереометрографа, с пом ощью которых с ост ав ляют топогра фи ческие планы , профили по заданны м направлениям ил и коорди наты отдельных точек местности.
При а налит ическом способе дл я изме рения снимков исп ользу ют стереокомпаратор, а вычисления выполня ют по специальным п рограм мам на ЭВМ.
В резуль т ате аналит ичес кой об ра ботк и сним ков м огут быть полу че ны координаты отельных точек и цифровы е моде ли мес тности.
Пр и с ост авлении топографичес ких пл анов м естнос ти б олее произ водительным явля етс я опт ико-м еханический сп особ обра ботки сн имков.
А н ал итический метод - наиболее униве рс альн ый и точный - це лесоо браз но ис польз оват ь для опре деления координат отде льных точек, изме ре ния деформаций, а также при определении объем ов з емля ных работ в к арьера х.
В ряде с лучаев ра циона льным явля етс я сочетание аналитического и оп тико- механическ ого с пособов обработки сни мков.
Системы координат и элементов ориентирования
Рабочие формулы
1 .1 0. При наз емной ст ерео фот ограм метри ческой с ъем ке использ уютс я три систем ы координат:
а) плоска я с ис те ма к оординат сним ка ozx с н а чалом в точке пересе чения пря мых, сое диняю щих координа тны е ме тки 1 -2, 3-4 (рис. 2). В этой сис теме з а ось x принимают лини ю 3-4, а за ось z - нормаль к н е й в точке 0;
Рис . 2
б ) прос транс твенная ф отог рамметрическ ая систем а координат X ф , Y ф , Z ф с началом в левом центре фотографирования (р ис. 3, а). За ось Y ф п рини ма ют проекцию гла вной оптической оси на горизонтальную плоскос ть, а за о сь X ф - горизон та льную пря мую, перпендикулярную напра влению оп тическ ой оси, а за ось Z ф - в е ртикаль в цен тре фотографиров ания.
В некоторых случа я х удобно исп ользовать систему фо тограмметри чески х координат, в которой нач ало координат остается тем ж е, а осью X ф считаетс я проекция баз иса фотогра фиров ания на горизонта льную плоско сть. Ос ь Y ф в этом с лучае совмеща ется с норма лью к направлению базиса, а напра вление оси Z ф - прежнее (р ис. 3, б).
Рис. 3
в) с истем а геод езически х координа т, которая м ожет быть государственн ой и ли условной .
1 .11 . Элементы , определяющие пол ож ение це нт ра ф отографирования от носительн о снимка, называют ся элементами внутреннего ориентирования. Это - главное фоку сное рас стоя ние камеры f и ко ординаты гл авно й то чк и o - x 0 и z 0 (см . рис. 2). О бычн о при из готовле нии и юстировке камеры добиваются, чтобы x 0 и z 0 были б лизки к ну лю. Зна че ние фокусн ого расст оян ия камеры f о пре деляю т с высо кой точностью и прив одят в ее пас порте .
1 .1 2. Элементами вн ешн его орие нт ирован ия (ЭВО) я вля ются величины, опре деляющие положен ие снимка в момент ф отографи ров ани я относительно приня той системы к оординат , гео дезическ ой или ф от ог рамметри ческ ой. Так их элементов (рис. 4) шесть:
- координат цен т ра фот ографирования Xs , Ys , Zs ;
- дирекционный угол оп ти ческ ой оси к амеры α0;
- уг ол н акло на опти ческой оси ω;
- угол п оворот снимка в своей плоск ости x .
Д ля п ос троения геодези чес ки о риент ированной модели местности нео бх одим о знать ЭВО пары снимк ов, т .е . всего 1 2 элементов - 6 лин ейны х и 6 угл овых .
Рис. 4:
1 - горизонталь ; 2 - оптиче ская ось камеры
1 .13 . В зависимости от положения снимков отн осит ельно базиса и значений ЭВО различают следующие случаи наземной стереофотосъемки; нормальный, равноотклоненный, равн он акл оненн ый, конвергентный и об щий .
Пр и обработ ке сн имков оптик о-мех ан ическим путем используют но рмаль ный и рав но откл оненные случаи съемки, схем а которых приве де на на рис. 5. В э ти х с лучаях ωл = ωп = x л = x п = 0, а уг лы скоса φл = φп.
Р ис. 5
А налит иче скую о бработку снимк ов с и сп ользованием ЭВМ в ып олн яют на основе зав исимост ей общег о случая съ емки, предусм атривающей произвольные значения ЭВО снимков.
1 .14. При не земной стереофо тосъ емке в отличие от аэрофотосъем ки ЭВО снимков и ба зис фотографирования обы чно ус та навливают или определяют в процессе вы полнения полевых работ с высокой точностью.
В н е которых слу чаях, н априм ер, при произв одс тве фотографирован ия с подвижной осно вы (вы соки е коле блющие ся опоры , борт судна и т.п.) н евозможно установить или определить ЭВО сним ков с необ ходимой точностью. В эти х условиях геоде зичес ки ори ен ти ров анн ая м оде ль м ожет быть построена аналитическим м ето дом с ис польз ова нием координ ат опорны х точек. Одновременно на этих построений могут бы ть опред елены и неизвестные ЭВО снимков .
Съемку при известных ЭВО снимков называют ориентиро ванно й ст е реоф отосъемкой , а при неизвестны х ЭВО - неориентиро в анной стере офотосъемкой .
1 .1 5. Связ ь между коорди на там и точек снимка и ме стнос ти в фо то грамм ет рическ ой системе (см. р ис. 3 , а ) при известных произ вольных ЭВО сн имк ов (общий с лучай орие нтированной стереоф отосъемки) в ыражается с ле ду ющим и за висимостями:
 , (1)
, (1)
гд е X ′ i , Y ′ i , Z ′ i - простра нс твенные координаты точки левого сним ка с началом в левом центре фотографирования;
X ″ i , Y ″ i , Z ″ i - то ж е для правого сн имка, но с на чалом в правом центре фот ографирования;
Bx , By - составляющие базиса фотографирован и я в принятой системе координат.
Пространственн ы е координаты точек лев ого и правого с нимков н аходят с использованием из вес тны х угловых ЭВО с ним ков по формулам:
 (2)
(2)
Э лем енты преобразований a 1,2,3 ; b 1,2,3 ; c 1,2,3 ( направляю щ ие косин усы ) получают по известным углам наклона и поворота снимков:
 (3)
(3)
Координаты точек местно с ти в базис ной системе фотогра мметричес ких координат (см. р ис. 3, б ) находя т из выражен ий:
 (4)
(4)
О т формул общего случая съем ки легко п ерейти к нормальному и равн оо тк лон енн ом у случаям , ис пользуем ым при обработ ке снимков оптико -мех ан ически м способом.
Та к, полагая α1 = α2 = ω1 = ω2 = x 1 = x 2 = 0 д ля нормальн ого с лучая съемк и и б аз ис ной с истемы координат ( By = 0), б у дем иметь:
 (5)
(5)
В э той же с лучае, но в первой сис тем е фотограмме тр ичес ких к оординат ( By ≠ 0 ) получим:
 (6)
(6)
Для паралле льного случая съ емк и, когда α1 = α2 = α, ко ординаты точек местнос ти в базисной системе коорд ин ат получают из выражений:
 (7)
(7)
Если прин ят ь α1 = α2 = 0, а ( By ≠ 0 ) ,
 (8)
(8)
гд е φ - гориз онтал ьный уг ол между н апр авлен ием опти ческой ос и и базисом фот ог раф иров ания (угол ск оса).
1 .16. Переход от координат то чек в одной из ф ото грамм ет рическ их систем к геодезическ им координат ам осуществляется по форм улам :
 (9)
(9)
г де Xs лг , Ys лг , Zs лг - геодезиче с кие координаты лев ого центр а фотографи ров ания;
α 0 - дирек ци онный угол опт ической оси левого сним ка;
к + г - поправ ка на кривиз ну Зем ли и ре фракци ю.
Если фотограмметрические координат п о лучены в базисной системе, то в геодезически е их п реобразуют по формулам :
 (10)
(10)
гд е αδ - дирекционный угол баз иса фот ографировани я.
1 .1 7. Если ЭВО сним ков известны приближе нно, то их находя т ан алитичес ким методом путем п остроения моде ли, ге одезически ориенти рова нно й по оп орным точкам . При этом используют зависим ости общего сл у ча я с ъемки, а пос троени е моде ли выполня ют н а ос нове совме стного ориент ирования левой и пра вой связок прое ктиру ющих лучей. Н аиболее с трогой с хем ой аналитичес кого определения ЭВО снимков и пост роения м одели является схем а, ос нованная на совместном решении линеаризованных уравнений к оллин еарности и компла нарнос ти с оотве тс твующих проектирующих лу чей левой и правой связ ок.
Уравнения колли не арнос ти для опорны х точек, изоб раженных на снимках, в ма тричной зап иси им еют вид:
 (11)
(11)
где
 - ра знос ти прос транственных коорди нат оп орной точки и ц ен тра фо тог рафирова ния в ф отограмметричес кой с ис теме координат.
- ра знос ти прос транственных коорди нат оп орной точки и ц ен тра фо тог рафирова ния в ф отограмметричес кой с ис теме координат.
Ур а внение комплана рнос ти для точек в этой же систе ме координат имеет в матричной зап иси вид:
 (12)
(12)
гд е B X = Xs п - Xs л ; BY = Ys п - Ys л ; BZ = Zs п - Zs л .
У рав нения ( 11) и ( 12) сод ержат общие неизвестные - 12 лин ейных и угловых ЭВО ле вого и прав ого снимков.
Каждая опорн а я точка, изобрази вш аяся на обоих снимк ах, п озволяет состави ть по четы ре уравнения вида ( 11) и одно уравне ние вида ( 12).
Таки м образом , для определения 12 не из вестных ЭВО необходим о иметь не м енее тре х общих опорных точек, поз воляющих составить 1 5 уравнений. Уравнения ( 11) и ( 12) не лин ейны относительно неиз вес тны х, поэ тому и х решают м етодом функциональной итерации (м етод Нью тон а). Дл я этого нео бходимо исх одные уравн ения прив ести к линей но му виду, исп ользуя ряд Тей лора и ограничиваясь членам и первого поря дка.
Ур а внения в поправках относительно приближ енно з ада нны х з начений неизве стны х Э ВО им ею т вид:
 (13)
(13)
Ко эффициенты эт их уравнений находя т по приближенно заданным значения м ЭВО и измеренным координатам точек с ним ка в соответствии с зависимостями :
 (14)
(14)
Зд ес ь
![]() ;
; ![]() ;
; ![]() , а элем енты пре образован ий
, а элем енты пре образован ий ![]() ;
; ![]() ;
; ![]() получают по приближенн о з аданным угловым ЭВО:
получают по приближенн о з аданным угловым ЭВО:
 (15)
(15)
Во вс ех выражениях xi , zi - измеренные плоские к оо рдин аты о порн ых точек на снимке
 (15)
(15)
С в ободны е члены у рав нени й ( 13) D 0 X , D 0 Y , V 0 q нах о дят по формулам ( 11) и ( 12) по приб лиже нно заданным значениям углов ых и линейных ЭВО ле вого и прав ого сн имк ов.
Общее число ур а внений погрешностей вида ( 13) за висит от чис ла опорны х и орие нтирующих точек, с хе ма расположен ия которых на площади с тереопары должна отвечать извес тным геом етричес ким услови ям .
Ре ком ендуем ые схемы ра сположе ния оп орны х точек при аналитическом ориентировании с нимков приведены на рис. 6.
Р ис. 6
Си с тем у ура вне ний п огрешнос ти ( 13) реша ют по способ у н аимен ьши х квадратов с оценкой величины поправок в опре деляемы е параметры и точности ре шения.
З ада чу в целом реша ют м етодом посл едова тельны х приближ ений и в резул ьта те находят попра вки в приближенные з начения ЭВО снимков стереопары (см. п рилож ение 18).
Коорди на ты точек ме стности в фотограмме трической системе получают в соответствии с выраже ниями ( 1) .
От геодезичес ки х координат опорных точек в ф отограм метрическ ую с истем у и обратно пе реходя т на основе приближе нно з аданного дирек ционно го угла оптической оси левого снимк а в соот вет ст вии с выражени ям и ( 10).
В связи с большим объ ем ом вычислений аналит ичес кое ориент ирование снимк ов и определен ие координат т очек по из ложе нной схеме целе сообра зно вып олнять с использ ованием ЭВМ с объемом опе ративной памяти не ме нее 1 024 с лов.
Погрешности наземной стереофотосъемки
1 .18. Ис точни ками погре шнос те й при наземн ой стереофотосъ емке являютс я:
а) неточное значени е элементов внутре ннего ориентирован ия съем очной камеры;
б) фи з ические ошибки снимка (дисторсия съемочного объектива, н еплоск ост ность с веточувс твительного с лоя и его деформ ация при обработке);
в) не с оответс твие ус тановленных ЭВО камеры заданным;
г) о ш ибки изм ерения баз иса и координат контрольны х точе к;
д) ошибки из м ерения с нимков;
е ) инс трументальные ошибки приборов и м етода о брабо тки рез ультатов из мерений .
1. 19. Влия ние ошибок в э лем ентах внутреннего ориент ирования камеры на координаты точек сним ка выраж ается завис им остя ми:
гд е δ f - погрешность принятого зн а чения фокусного рас стояния каме ры;
x 0 , z 0 - координаты главной точки сним ка.
Д ля того чт обы влияние ошибок элементов внутреннего ориентирова ния с оответствовало точности стереофот ограмм етрически х из мерений, эти эл еме нты должн ы быть изв естны с пре дельными ошибками:
при f = 200 δf ≤ ±0,03 мм; x 0 ≤ ±0,05 мм; z 0 ≤ ±0,02 мм;
при f = 100 δf ≤ ±0,01 мм; x 0 ≤ ±0,02 мм; z 0 ≤ ±0,01 мм.
1 .20. Фи зичес кие ошибки сним ков при использ овании современных фототеодолитны х к амер и специ альны х шлифованных фотопл астинок мог ут быть сведены к ве личинам, леж ащим за преде лами точности из мерения сни мков в фотограмметрических приб орах.
Однако в реальных у с ловиях при использ овании обычных фотопластинок ошибки в положении точек снимк а за сче т неплоскостн ости све точувс твительного слоя м огут быть дос та точно велики. Поэтом у при повы шенных требован ия х к точнос ти определения координат точек м ес тности путем назем ной сте реофотосъ емки необходим о проводить специальные ис следования плос костности фотопластинок.
1 .21 . Ошибки определе ния координат точе к местнос ти при ориентированной стереофотосъ емке связа ны прежде вс его с оши бкам и устанавливаемых при фотографировании элем ен тов внешне го ориентирования. Эти ошибки нося т сис тем атиче ский характер и для нормального случая съем ки вы раж аю тся следующ ими ф ормулами:
 (16)
(16)
Для того чтобы ошибки в поло же нии точек с ним ков и з-за неточного углового ориентирования камеры в процес се с ъемки были бы одного поря дка с точностью изм ерения снимков, необ ходи мо, чтобы ошибки ориентирования не превосходили следующих величин:
δα ≤ ±30″; δ Δα ( γ ) ≤ ±5″ ; δω ≤ 10″.
Относительные погрешности и з мере ния величины базиса съемки вызывают соотве тствующие ошибки в координ атах точек местн ости
![]() .
.
Относительные ошибки и змерен ия баз иса обычно не превышают 1 /3000.
1 .22. Ошибки изм ере ния координ ат точек с ним ков приводят к случайным ошибкам в положе нии точек местности, которые можно рассчитывать по приближе нным форм улам :
 (17)
(17)
З десь μ - средняя квадратическая ошибка из ме рения координат и параллакс ов;
![]() - знаменатель масштаба изобра же ния
н а снимке;
- знаменатель масштаба изобра же ния
н а снимке;
![]() ;
; ![]() ;
; ![]() .
.
Вы ражения ( 17) удобно ис пол ьз овать для рас чет а ожидаемы х ошиб ок в положении т очек на учас тке съемки при рекогнос цировочных работ ах на иссле ду емом объе кте с использованием с пециаль ного рек огносци ров очного п ланшет а (приложение 6).
1 .28. Точнос ть пос троения м одели и определ ен ия координ ат точе к местн ос ти при неориен тиров анной стереофо тосъ емке, когда у гл овые и линей ные ЭВО изв естн ы приближе нно, с вяз ана не толь ко с точностью измерения и идентиф икаци и опорных точек, исп ольз уем ых для нахождени я неизвестных ЭВО, но и с о с хемой расп оложени я опорных точе к, т.е. с геометрией об ратной фот ограмметри ческой засечки.
Для рас чета ож ид аемы х оши бок о пре деления ЭВО и координат точек местности в этом случае це лесо образн о исп ользоват ь численный метод, с ис по льз ованием п олучаем ых п ри ре шении уравне ний ( 13) вес ов ых коэ ффици ен тов. При этом ош ибки в зн ачениях ЭВО получаю т из вы раже ний вида
![]() ,
,
где μ - ошибка измерени я координат;
Qjj - весо в ой коэфф ициен т, соответ ствующ ий оп ределяем ом у п арам етру.
II . СОСТАВЛЕНИЕ ПРОЕКТА ВЫПОЛНЕНИЯ НАЗЕМНОЙ СТЕРЕОФОТОСЪЕМКИ
2.1. Для опре де лен ия в озм ожн ости и цел есообразн ости наземной стереофотосъемки п ри решении конкретных задач , связанных с изысканиями трассы и сооруж ен ий на ней , необход им о предв ари тельно оз накомиться с рай оном раб от по имеющемуся картографическ ом у и аэрофо тосъем очн ому ма териалам.
2.2. О с новными объектами наземной стереофот осъ ем ки при изыскани ях новых железных и автомобильных дорог являются:
а) н е залесенные или мелкозалесенные склоны с углами накло на б олее 20-25°;
б ) с кальны е прижимы и осып и;
в) обвалоопасные и оползневые у част ки.
Выделение этих участков п роизвод ится, как правило , на основ е изучения аэроф от осъем очных материалов по трассе.
Есл и протяжение и площадь участ ка съемки менее 1 км2, т о рабочий п роект съем ки - размещение бази сов и съемочны х станций - сост авляют н а ос нове по левой рекогн осци ровк и участка.
При съемке протя же нны х кос огоров и зна чительны х участков т еррит ории в горных район ах составляют предварит ельный проект съемки, а после полевой рек огн осц ировки - рабочий проект.
2.3. Для с о став лени я пре дварительного проект а съемки исп ользуют имеющиеся н а и зучаемый район картографи че ские матери алы масшт аба 1 :25000 и крупне е, на кот оры х н амечаю т схем у раз мещения съем очных б ази сов, учитывая ох ват всего сн имаем ого участка и минимума раб от по привяз ке станций и контрольны х точе к.
Пр и нали чии н а рай он из ысканий аэросним ков масштаб а 1:1 00 00 - 1:40 000 дл я сост авлени я проект а съемки мог ут быть и сп ользов аны марш рутн ые ф отосхемы , составле нные из контактных или увелич енны х аэросн им ков.
2.4. Дл я обе спечен ия съем ки участка с ми ним умом «м ерт вы х» зон и наимен ьшим числ ом станц ий базисы следуе т размещ ат ь сле дующим образом:
- п ерп енди куля рно направлени ю с ката, что позволяе т пол нее от образить особенности рельеф а сним аем ого участка и ум еньшить количеств о «м ертвы х» з он;
- н ормал ьн о к направ лен ию оврагов, чтобы обеспе чи ть на снимках изображ ение тальвега;
- на возв ы шен ны х мест ах, так как кол ич ес тво «м ерт вых» пр остранств ум ен ьшае тся с увеличением относительной выс оты стояния ф ототе од олита.
2.5. При расч е те длины баз иса и макс им ал ьных отстояний нео бходим о учи тывать ме то д сост авлен ия плана. Так, в случае оп тик о-мех ани ческого способа обработки сн имк ов (ст ереоавтог ра ф, сте реоплан играф ) составление плана определенного мас шта ба может быть вы по лн ен о, е сли значения отстояний Y и бази с ов B н е будут превышать в ма сшта бе плана величин, указа нных в табл. 1.
Т аблица 1
|
Названи е п ри бора |
Ymax, мм |
Bmax, мм |
bz , мм |
|
Стерео авто граф 1 81 8 |
800 |
1 20 |
20 |
|
Стереопл аниграф |
1500 |
74 0 |
1 80 |
|
Стереометрогра ф |
1 500 |
700 |
14 0 |
2.6. Край н ие точк и базисов ж ела тельно расп олаг ат ь на одинаковых выс отах; при не воз можности вы полне ния э того ус ловия допускаю т превышения концов базиса не более Bz пр ≤ 0,3 B .
При и с пользовании граф омехани ческ ог о способа для составления плана при расче те В z пр сл е дует руководс твовать ся да нными табл. 1.
2.7. Расстоя ние от съемочной станции до дальне й гра ницы сн им аемого учас тка не должно (при f к = 200 мм) превышать для п ланов м асштаба 1 :500 - 600-700; 1 :1 000 - 1 000-1 200; 1: 2000 - 2500; 1 :5000 - 4 000 - 5000 м.
При этих рассто я ниях длину баз иса рассчиты вают из условий обеспечени я требуемой точности получен ия координа т на дальнем плане и воз можности стереоскопиче ской обра ботки переднего плана намеченного для с ъемки уча стка местнос ти.
Минималь н ую длин у баз иса фото графи ро вания при f к = 2 00 мм, mp = ± 0, 01 мм и допустимых о шибк ах в положении точек ±0,4 мм в масш табе плана определяют по формуле
![]() ,
,
где t - зн а менател ь м ас штаба с остав ля емого плана .
Р а сс тоя ние до ближней границы участка съемки, который при вы бранн ом значении баз иса может быть обработан стереоскопичес ки
Ymin = 4 B .
2 .8 . По ложе ние с ъемочных точек и нап равление баз исов долж но обеспе чивать фотограф ирование заданн ого участка с ъемки без разрывов с перекры тие м между соседними секторами съем ки по пе реднему п лану не менее 20 %.
Для о п ределения границ съе мки использую т вычерченные на восковке и ли целлулои де пале тки, с оответствующие нормаль ному и равнооткл оненному случаям с ъемки с лев ой и п равой точек фот ографи рования (рис. 7).
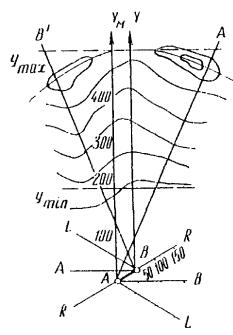
Рис . 7
Пр и э той угол λ равен половина горизонтального угла воля зрения объектива фотокам еры
![]() ,
,
где l - г ор изонтальный разм ер кадра (при f к = 200 мм, λ ≈ 22°).
На п а летках прочерчив ают п равую и левую границы с ъемки, направления норм ал ьн ых и о ткл оненных базис ов , а также шкалы расстоян ий в м ас шт абе основы . Совместив палетки т аким образом , чтобы направле ния б ази сов , соответствующие нормальному или отклоненным случаям, с овп адали, а зна че ние баз ис а было равно выбранному, оп реде ляют наилучшее по ложе ние бази са и гран ицы съемки.
При съемке протяженных косогоров прое к тируют в основном съемк у при нормальном п олож ении оси и каме ры, а н аправл ен ие бази са должн о быть прим ерно парал ле льно н аправлен ию прос тирания склона. При резком изменении направления простирания склона применяют и равноотклоненные с лучаи съемки.
2.9. Вы б ранны е положен ия базис ов и границы съ емки последовательно наносят на плановую основу, на которой по дписы вают вид съемк и с каж дого базиса, длину и номер.
Н апример,
![]() , чт о оз начает базис № 12, длина -
60 м, виды съемки: норм альна я, скос влево, ск ос вправо. Угол скос а (отклонение осе й съ емки от нормали) обы чн о вы бирае тс я стандартным - 31°,5.
, чт о оз начает базис № 12, длина -
60 м, виды съемки: норм альна я, скос влево, ск ос вправо. Угол скос а (отклонение осе й съ емки от нормали) обы чн о вы бирае тс я стандартным - 31°,5.
2. 1 0. Для опре де ле ния вертик ального захват а м естн ости с вы бран ны х точек съемки строят палетк у на ми ллиметровке в удобном м асшта бе (рис. 8), на которой по гориз онтали откладывают расстоя ния , а по вертикали - превышен ия. Из точки 0 проводят границы вертикально го захвата м естнос ти, с оответствующие при предел ьны х перемещ ения х объектива «Фо тео» 1 9/13138 углу наклона - 29° и углу возвышения +25 °. О пределив з атем пре вышения относ ительно точки фотографиров ан ия верхней и низшей точек участка съемки, наносят по расстояниям их на палет ку. Е сли он и попадают в сектор вертикального захвата, то с в ыбранной точки местности весь участок может быть сфотографирован.
Рис . 8
- · - · - - объектив вверх у;
— - в цен т ре;
- - - - вни з у
2. 11 . Схем у геодез иче ской при вяз ки баз ис ны х и контрольных точе к составляют в зависимости от ме тодики после дующе й к амеральной об работ ки.
Если обр або тку н аме чают производить т олько оп тик о-ме ханическим путем , то необ ходимо из геодез иче ских измерений опре де лить к оординаты и отметки вс ех левы х ба зис ных точек, аз имуты б аз исов и при вя за ть не мен ее одной кон трольной точки н а дальнем плане стереопары .
Пр и съемк е протяженн ых косогоров и трудн одоступны х скальных прижимов целесообразно вз амен сп лошной геодез ическ ой привяз ки стереопар и базисо в использ овать фотограм ме тричес кий метод а налитического пос троения опорной сети.
Прот я же ние фот ограм метрической сети между точками геодез ичес кой опоры может сос тавлять в этом случае 7-8 стереопа р.
2.1 2. Схему геодезической привязки прое ктируют с обеспече нием точности определения координат контрольных и базисны х точек, регламентируемой инс трукция ми по топ осъемкам в соответствующем масштабе для точек съемочного об основания или с пе циальными техническими условия ми. Геодезическую привяз ку базисов и контрольных пунктов осущ ествляют за сечкам и с точек магис трального хода, прокладываемого в районе проектируе мой трассы (рис. 9, а).
Если этот участок труднодоступе н и м агис тральны й ход прокладыва ть н ец елесообра зно или невозм ожно, то для геодезического обоснования съемки строят анали тическую сеть, опирающуюс я на край ние точки маги стрального хода на концах уча стк а (рис. 9, б). В э том с лучае а налити ческую ось проектируют таким образ ом, чтобы по возможнос ти пункты сети совпадали с базисными или конт рольн ым и точкам и. Схему ге одези ческой привязки составляют с расчетом определения ко ордина т и отм еток одной из точе к каждого базиса (предпочтительно левой).
Ри с. 9
При в язку контрольных то чек осуществляют прямыми засечка ми с нескольких б ази сных точе к, к оординаты которых определены точно.
При р а зреженной геодез ической привязке учас тка съем ки опреде ляют координаты конт роль ны х точек на край них с тере опарах и, кроме того, дирекционные углы все х базис ов фотогра фи рова ния.
2 . 1 3. В некоторы х случая х при повышенны х требования х к точности опреде ле ния координат т очек местности, наприм ер, при изучении ополз не вы х явлений конве ргентную съем ку участка проекти рую т с уве личенных баз исов. Прим енение кон верген тн ой съемк и об еспечивает увеличение углов засе чки при опре деляемы х точках, ко то рые в обычных ус лов ия х пр и н о рма льном слу чае съе мки кам ерами с f = 200 мм не превышают 1 6°. При конве рге нтн ой с ъем ке з а с чет увеличе ния базиса фотографирова ния угл и засе чк и м огут быть увеличе ны до 40-50°, что при одинаковой точнос ти из мерен ия ко ордин ат точек сним ка приводи т к повышен ию точности о предел ения к оординат точек местнос ти в 2-2,5 раз а.
П рое кт съемки таких участков с использ ованием конвергентной съемки с оставляют на ос нове полевой ре когносцировки, в процессе которой нам ечают съемочные точки и направления оси камеры относительно б азис а.
2.14. Проект крупномасштабной съемки плос ких учас тков мес тности (ж елезнодорож ных с танций, промышле нных площадок и других территорий со сложной с итуацией и затрудненными условия ми непос ре дственных измерений) сос тавля ют, как прав ило, после поле вой рекогнос цировки.
Аппаратура и оборудование для съемки и его подготовка
2. 1 5. Фототеодолитная па ртия должна иметь следующ ие инструм енты и оборудование:
- фототеодолитн ы й комплект (« Photeo 19 /1318», « Tal ») , ф отокам ера которого должна быть оборудована затвором с диапаз оном экс поз иций в пределах 1 :25-1 :100 сек или универс альную фотокаме ру « UMK -1 0/1 31 8»;
- любит е льский фотоаппарат типа «Ф эд» или «М осква» ;
- теодолит с точностью от с чета по горизонтальному и ве ртикальному кругам не грубее 10″;
- технический нивелир с к омплектом реек;
- экспонометр ;
- стальную рулетку длиной 20-50 м и т есьмяную рулетку длин ой 2 м;
- топографический зонт;
- шанцевы й инст руме нт (лопаты, моло ток и т.п.) ;
- бинокл и ;
- экке р;
- рекогн о сцировочную приз му или планшет ;
- ко м плект из 20-30 м етал лически х и бумажных м арок раз личной окраски для маркирования опорных и других точек и элемен тов на учас тке съемки;
- стан да ртный ком плект полевого фотолабораторно го оборудования, в ключая ф отореа ктив ы (прилож ение 5);
- фототеодолитные пластинки чу в ств ител ьн остью не более 6 ед. Гос та (или съемке с неп одвижны х опо р) и ли вы сокочувствительные (до 250 ед. пластинки «И зоорт о» при съемк е с подвиж ных опор). Необходим ое для с ъем ки количес тво фотопласт инок опре деляют по предварит ель ном у прое кту съемки;
- полев ы е журналы, бланки, ка льк у, бум агу и другие к анце ляр ск ие принадлежности;
- стер еос коп.
2. 1 6. Фототеодолиты, применяемые пр и ст ереофот осъ емке, должны обес печив ать постоя нс тво элем ентов внутреннего и, при фотографировании с твердой опо ры, вне шнего ориентирования в процесс е съем ки с ошибками, не превы шающ им и величи н, приве денных в табл. 2.
Все оборудование должно бы ть тщате льно осм отрено для вы явления и ус транения возможны х неисправностей и п ос ле проведен ия рабочих пове рок и юстировок (см. п рилож ение 1) приведено в ра бочее состоян ие и подготовлено к транс портировке.
Таблица 2
|
Эле м енты ориен тирования |
Допу с тимые значения ошибок ориентирования фотокаме ры с ф окусным расстоянием |
|
|
10 0 мм |
200 мм |
|
|
Фокусное рас с тояние камеры |
±0,0 1 мм |
± 0,03 мм |
|
Полож е ние главной точки |
±0,02 мм ±0,0 1 мм |
±0,05 мм ±0,02 мм |
|
Угол скоса |
± 20 сек |
±1 0 сек |
|
Угол конвергенци и |
± 5 с е к |
± 5 с е к |
|
Угол наклона опт и чес кой оси |
±20 с ек |
±14 с ек |
|
Угол поворота фотопластинки |
± 20 сек |
±1 0 сек |
III . ПОЛЕВЫЕ РАБОТЫ
3.1 . Поле вые раб оты , выполняем ые фотот еодолитн ой партией, состоящей из двух-трех ИТР и четы рех-пяти рабочих, включают следующ ие проц ес сы :
- р е когносцировку участка и соста вле ние рабочего прое кта съемки;
- з акре плен ие контрольны х и с ъем очны х точек и прове де ние работ по определе нию их геодез ических координ ат;
- м аркировку контрольных точек и отдельны х элементов ситуации;
- фотографировани е;
- фотолабораторные работ ы и анализ полученных нега тивов;
- топографиче ское и инжен ерное дешифрирование сн им ков.
Рекогносцировка учас тков съе мки
3 .2 . Задачей рекогносцировки я вляе тся опре де лен ие по мес тнос ти наиболее целесообразного положе ния фототеодолитных с тоя нок, контрольн ых пун ктов , оп орны х т очек и с хе м их геоде зической привяз ки к с ущест вующей ге одез ичес кой се ти или к точкам магистрального хода, проложенного в районе прое кти руе мой трасс ы.
В ре з ул ьтате рекогносцировки долже н бы ть с ос тавлен раб очий прое кт раз ме щения и геодези че ской привязки баз исны х, кон тро льных и опорн ых точек.
3.3. Пр и вы боре ф ототеодоли тн ых с та нций и определе нии гра ниц с ъе мки удоб но польз оваться фотоаппара тами тип ов «Фэд» или « Москва», имеющ им и тот же фотографиче ски й захват, что и фот отеодолит « Photeo 1 9/131 8» с f к = 200 мм. Рекогносцировку выполняют ин жене р- фотограммет ри ст и два рабочих.
3. 4. Рекогнос цировку косогорн ого участка мес тнос ти сле дует начина ть с общего осмотра учас тк а съем ки с гос подствующи х вы со т и п роверк и правильности составл ения предварите льного п роекта раз меще ния ф ототеодолитны х станций. При н еобходимос ти положен ие фототеодолитных с танций , нам еченное в предва рительном проекте, изменя ют в соответствии с выя влен ными на местности условиями.
В ре з ультате общего изучен ия местнос ти уточня ют воз можность создания р азреже нного геод езичес кого об осн ования съемки, з оны разм ещения фототеодолитны х стоя нок с учетом фотосъемки участка без фотограмметрических раз рывов и минимального количе ства « мертвых» пространс тв.
3.5. После общего изучен и я местн ости выполня ют де тальную ре когносциров ку, це лью которой я вляе тся вы бор с хемы съемки и ок ончательн ого положе ния фототе одоли тны х с тоянок, о пределения границ с екторов съе мки с ка жд ого ба зиса и полож ение контрольны х и дополните льных точе к геоде зического обоснования. П ри этом необ ходимо в ып олня ть с ледую щие ус ловия:
1 . Точки стоя ния фототе од ол ита д олжн ы б ыть уд обны для установки штатива и ра боты наблюдателя.
2 . Горизонта л ьн ые и ве ртикаль ные сек торы охвата не должны закрываться б лиз рас положенны ми предметам и (деревьями, строен ия ми, складами рельефа и т.п.).
3. Угол наклона базиса должен быть по возможности минимальн ы м и не превыша ть 1 0° при и сследующей об раб отке снимков на сте реоавт ографе и 1 5° при и спольз овании стереок омпарат ор а.
4. Между базисными точками должна быть прямая вид им ость со штативов , п риче м визирный луч должен п ро хо дить не ближе 0,5 м от поверхности земли или местных предметов.
5. Привязка левой точк и базиса к оп орно й ге одези ческой сети или к точкам м агистрального хода должна обес пе чиватьс я п рос тым и уд об ным способом.
6. В сл у чае раз рыв а м ежду периодом съемки и геодез иче ской привязкой п унк тов расположение ба зис ны х точек должн о об еспечивать длит ельную с охра ннос ть за креп ле нных ц ен тров.
Е с ли с баз иса невы го дн о п роиз водит ь съе мку при нормальном положении оптичес ких осей , а та кже не обходимо увеличить площадь с ъем ки, то определяю т гра ницы ее при ск осах опт ической ос и влево или вправо. Угол ск оса (φ) обы чно выб ира ют с та нда ртн ым - 31° 30′.
В этом случ а е для опре деления направления оптичес кой оси откладывают от направле нии базис а угол - 90° + φ (на левой точке) и 90° - φ ( на правой точке).
Уточненны е на м ес тности положе ния базисов и сект оров съ ем ки на носят на ос нов у, на которой с оставля лся п редв ари тельный проект (карту или ф отосхему из а эрофотосним ков), где нам еча ют выбранные в резу льтате поле вой ре когносцировки виды с ъемки и, в за вис имости от вел ичины вертикального за хвата, положен ие объектив а по вертикали в момент съ ем ки.
Выбор место по ложен ия базис ов произ водят последо ватель но с расчетом обеспечен ия пере кры тия межд у границ ам и съемки сме жны х с тереопар поря дка 20 %, по ближ не му п лану с ним ае мого участка.
3.6. Дл я уточнени я секторов съе мки и ус ловий фотогра фи рования объе кта в процессе полевой ре когнос цировки целесообразно и спольз овать рекогн осци ровочн ую приз му или ре когн осцировочный планшет (приложение 6) с фотографиров анием участка фотокамерами типа «Ф эд» ( f = 86 мм ) или « Москва» ( f = 110 мм).
После проявления эк с понирован ной пленки из готовляю т увеличенные до формата ф ототеодолитн ого снимка отп ечатки (при f = 36 м м примерно в пять раз, а при f = 1 10 мм в два раза ). Полученные снимки позволя ют проконтролировать прав ильнос ть составле ния рабоче го проекта с ъемки, опреде лить з оны перекрытий со сме жных базисов, выявить « мертвые» з оны, наметить хорошо из ображающиеся на сн имках местные пре дметы, которые м ожно исп ольз ова ть в качестве контрольных точек и т.п.
3.7. Одновременно с выбором положения ба з ис ных точе к наме чаю т контрольные пункты для ка ждого с ектора съ емки с баз ис а и схему геодез ической привязк и базисных и контрольны х пунктов.
В качестве контрольных пунктов удобнее всего и с пользовать хорошо заметны е мес тные пре дметы, выделя ющиеся на фоне участка съемки и отчетливо наблюдае мы е с обеих баз исных точек (строения, опоры линий э лектропере дач и связи, отдельные деревья , выделяющиеся большие кам ни, характерны е скалы и т.п.). При однооб разном ха рактере м естности намечают зоны, в которых сл ед уе т ус та новить и з амаркирова ть контрольные точки .
Гео де зичес кое опре деление бази сны х и кон трольны х пункт ов проектир уют с рас че том ис польз ования глав ны м об разом прямых, обратн ых и ком бинирова нны х у гловых засечек .
Е с ли базис ны е и контрольны е пункты предполагается определять с магис трального хода, п роложенного в ра йоне про екти руемо й т рассы, прямым и засечками, т о необходим о обеспечи ть видим ос ть определя ем ых точек не менее ч ем с тре х точек хода при углах з асечки не м енее 80°. На с лож ных, трудн одос тупных учас тках, когда пролож ение магистрального хода нецелес ообраз но и з атруднительно, геодез ическ ое обоснование произ водят пос трое нием с ис тем ы треугольников.
При этом вершины треугольников желательно совме с тить с базисным и точками .
3.8. Рекогно с цировку и с оставление рабочего прое кта с ъем ки протяженн ых прижим ов и косогоров с раз реженным полевым обоснованием произ водят обычны м образ ом, но при этом более тщате льно следя т з а с охра нен ием перекрытия м ежду см ежны ми моделями. Одновреме нно с вы бором полож ения баз исов намечают схему работ по пространственном у ориенти рованию баз ис ов отн осительно произ вольно принятого начала (нап риме р, направ ление первого баз иса, рис. 10). Для опре деления дирекционн ых углов баз ис ов в принятой с ис теме координа т нам ечают угловой ход, свя зывающий все баз исы и зам ыкаю щий ся на опорных пунктах по концам участка съемки.
Рис . 10
3 .9. О собе ннос ть рекогнос цировки и со ставления рабоч его прое кта съемки плоских территорий с ос тои т в том, что в этом с лучае бази сны е точки должны расп олагаться на возвы шенных относительно плоскости участка местах. В качеств е таких точек можно вы бирать местны е высокие со оружения, наприм ер, п рож екторные мачты на же лез нодо рожны х станц иях или вы со ки е здан ия , вершины окруж ающ их холм ов или борта долины . Ес ли вблизи участк а, подле жащего съемке, нет так их высоки х точек или сооружени й, то фотог рафировать м ож но с автовышки , на которой ус тана вливаю т фот ок амеру.
При съ е мке плос ких те рриторий, как правило, использ уют общий или равн онакл онный с луча и съем ки, а баз ис фотографирования может бы ть го ризонтальны м или ве ртикальным .
На рис. 11 , 12, 13 приведены основные схемы фотограф ирования при с ъемке плоских участков мес тнос ти.
Рис . 11
Рис . 12
Ри с. 13
3.10. Полож е ние точек и базисов фотографирования при съем ке плоских участков территории выбирают с рас четом с ъемки при м инимуме « ме ртв ых» зон и фотогра мме трических ра зрывов. При этом в случае с ъемки с высоких сооружений использую т вертикальный баз ис фотографирования ( ри с. 11), а в остальн ых случая х - гориз онтальный при примерно равнонаклоненных осях сним ков (рис. 12, 13),
Для определен и я площади зах вата каждой ст ереопары при р екогносци ровке и с оставлении рабочего проекта съемки обяз ате льно произв одят фотогра фиро вани е малоформатными фотоаппаратами и полученные сним ки используют для опреде ления зон, в которых дол жны располага ться опорные точки, н еобходимые для по строения и ориен тирования фотограмм етричес ких моделей ана литически м методом.
3.11. При ре гулярных съемках ополз не вых участков рекогнос цировку и сост авление проекта раз мещения ба зисов произ водят особенно тщательно, а т о чки фотогра фиро вания закреп ля ют бето нными столбами с зацементированными м аркам и с таким расчетом , чт обы в каждом цикле фотографирования э лемен ты внешнего ориент иров ан ия с нимков устанавливались с ма ксима льн ой точнос тью.
Положение баз исны х точек выби ра ют при этом д ля ре ше ния двух з адач: составления планов оползн евы х учас тков и опре делен ия координат марок, заложенных в те ло ополз ня . В пе рвом с лучае длина бази са и н аправл ен ие съе мочных осе й долж ны обе спе чивать возможн ос ть обраб отки снимков оптико-ме хани ческим способом, а в о втор ом - аналитическим.
Примерная схе ма с ъемки оползн евог о участка, обеспечивающая решение обе их зада ч приведена на рис. 14.

Р ис. 14
Пр и рекогн осци ров ке положения базисов для съемки ополз невых участк ов следует ис пользовать рекогносцировочный планшет и производить с ъемки м алоформа тным и ф оток ам ерами для тщательной корре ктировки положе ния це нтров фотографирования и направления съем ки перед окон чате ль ным з акреплением концов баз исов бетон ными столба ми.
3. 1 2. Р екогнос цировочные работы при использовании наз емной стереоф отос ъемки для при вязки аэрофотосним ков имеют следующие особенности.
1 . Рекогносцировку м естнос ти и определение положения баз исны х точек производя т с использованием контактных аэрофотосним ков.
2. Сектор ы съемки должны охватывать только зоны располо же ния опозна ков, необходимы х для обос нования аэрофотосъем ки, поэтом у перекры тия между смеж ными секторами съемки не треб уется .
3. Необходимость в проектировании пр е имущественного норм ального случая с ъем ки отпадае т, так как каждая с тереопа ра предназначается для определени я в результате измерений лишь нескольких (трех-пя ти) точек в зоне расположения опознаков аналитичес ким методом.
4. Выбра нны е и закрепленные базис ные точки следует опознавать на аэрофотос ним ках .
5. Ко н трол ьны е п ункты, координа ты которы х тре буется определить геоде зическ ими работами, сп ециально не н ам ечают. Использу ют толь ко пункты гос ударс твенной и ли опорной сет и, п опадаю щие в се ктор съемки , а та кие н амечают т очки м ес тнос ти, удобны е для кон троля п равильнос ти съем ки по методу контрольны х направле ний.
В р е зультате ре когнос цировочны х работ сос тавляю т рабочий проект фототео долитн ой съемк и, с ос тоящ ий из схемы съемки, ге одез иче ского о бос нования и краткой пояс нительной записки.
На с хе ме съ емки показ ываю т:
- положени е и нумерацию базис ов фотографирования, виды съем ки н орм альный, равн оотклоненный, на клонный и т.п.);
- границы зон фотографировани я с каждого баз иса;
- местоположение о п орных точек.
В поя сните льной записке от ражаетс я последовательность съем очных работ и ус ловия съемк и с каждого баз иса, выяв ленные в про це ссе рекогнос циров ки (характе р ос вещеннос ти, в рем я дня).
Геодезические работы по обоснованию съемки
3.11 . Баз исные и контрольные точки, а также точки съем очн ого обоснов ания закрепляют в процессе рекогносци ров ки н а м ес тн ос ти постоянными или временны ми це нт рами .
Пос т оянные цен тры устанавли вают при съем ках оползневых участк ов и подходов к прое ктиру емым тонн еля м.
Тип пос т оянного цент ра выбирают в зависим ост и от район а р абот и н еобходим ого срока с охранности в соответ ствии с суще ст вующим и рекомендациям и.
Временным центро м в обычных условиях может служит ь де ревянный кол длиной 0,5-0, 6 м, в верх ний срез кот орого для точного це нтрировани я ин струме нт а вбивает ся гвоз дь.
При твердых и скали с тых грунт ах в каче стве центров следу ет применя ть либо з аос тренны е м еталличес кие ш тыри, либо м еталли ческие трубки с керн ом- меткой дл я центрирования ин струмента .
Р я дом с центром устанавливают с торожок с обоз начение м номе ра то чк и и других необ ходимых сведений . Време нным центром в условиях работы на железн од орожн ой с танции или промпл ощ адке могут с лужить кос тыли, обрез ки металличес ких труб и т.п. Вокруг центра окапывают или вы кла ды вают круг из камней.
3. 1 2. П ри необходим ос ти кон трольные и опорные то чки п еред с ъем кой ма рк ируют с пом ощью фанерных щитов, плотного картона ил и ткани. В г орных ска льных райо на х марки ровку конт рольн ых точе к осущ еств ляют выкладыванием туров или нанесением ма рок опред елен ной форм ы с по мо щью ма сл яной крас ки на скале.
Фор м а маро к мож ет бы ть произ вольн ой ( треу гольник, ква драт, круг, к рес т), но для повышения т очнос ти ге одез ических измерений при оп ред елении координат точек необ ходим о отметить геом етрический цен тр м арки, а в специа ль ном ж урнале з аписать раз меры марк и.
Минимальные ра змеры марок з авися т от рас ст оян ия между маркой и баз исной точкой и должны вы бират ься та кими, чтобы изображение марки на сним ке им ело разм еры н е мене е 0, 12×0 ,004 мм.
Для опр е деления допустим ых миним альных ра змеров ма рок ре ком ендуется пол ьзоваться табл. 3, рассчитан ной по форм уле
![]() ,
,
гд е L - в е ртика льны й или горизонталь ны й размер марки в натуре, м;
l - соответствующий раз ме р изоб ражен ия марки на сн им ках, мм;
Y - отстояни е д о марки, м;
f к - ф ок усн ое рас стоя ни е кам еры, мм (200 мм).
Таблица 3
|
Минимальн ы е размеры м арок |
Расстоян ие, м |
||||||
|
50 |
1 00 |
200 |
400 |
600 |
800 |
1 000 |
|
|
Вертикальный |
0,03 |
0,06 |
0, 1 2 |
0,25 |
0,35 |
0,50 |
0 ,6 0 |
|
Гори зон таль ны й |
0,0 1 |
0, 02 |
0,0 4 |
0,08 |
0, 1 5 |
0,20 |
0, 2 0 |
3. 1 3. Если по условиям организа ции изы скательских работ в период между фотосъем кой и выполне нием геодезических ра бот предполага ется раз рыв во времени, то з акрепление и ма ркировку точек на м естности производят особен но тщательно с расчетом обе спечения их с охранности до начала проведен ия ра бот по геодез ической привязк е.
Следует и м еть в виду, что при производстве ф ототоп ограф ической с ъем ки п утевого ра звити я ста нции не допус тим разрыв во врем ени между фотосъем кой и в ыполне нием ге одези ческ их работ п о оп ределе нию координат зам аркирован ных точек, так как они на ходятся в з оне интенсивного движен ия поез дов и поэтом у неиз менность положения м арок не м ожет быть обеспечена .
3. 1 4. Геодези ческие работы по об основ анию съемки выполн яют в соответствии с рабочей схе мой, сос тавленн ой в процес се рекогносцировки участка. Независимо от способа определения погрешнос ти в положении базис ных и контрольных точек относительно пунктов рабочего обосн о в ания или м агис трального хода не должны превыш ат ь:
в плане - ±0, 2 мм в м асш табе составляем ого плана;
по высоте - 1 /8 прин ятого сечения рельефа в рав нинном и всхолм ленном учас тках и 1 /5 - в горных рай онах.
3.1 5 . Способ ы построен ия раб очего об ос нования можн о варьировать в зависимости от характера учас тка.
При необходи м ос ти проложения магис тральн ого хода в рай оне изы скивае мой трассы удобны м спос обом проложения хода с одноврем енны м определением координат базисны х и контрольных точек я вляе тся с пособ многократны х боковых засечек, предл оже нны й п роф. А.И. Д урневым .
С хема с ъемки по спос обу боковых з асечек с точе к магистрального хода п оказ ана на рис. 15 и 16.
Рис . 1 5
Рис . 1 6
Здесь точки 1, 2, 3 ... пункты м агистрального хода, В-1, В -2 .... базисные или контрольные точки или дополн ительны е пункты, не обходимые дл я п остроения хода. Расположен ие боковых пунктов мож ет быть двусторонним (рис. 15) и односторонним (рис. 16). Полевые работы заклю чаются в изм ерении углов A 1 , B 1 ; A ′1, B ′1 ; A 2 , B 2 ; А′ 2 , B ′2 ... A n , B n ; A ′ n , B ′ n и базисов B 1 и Bn в начале и конце хода.
Для получе н ия значения дли ны проме жут очных сторон необходимо вы полнить обы чное решен ие тре угольни ков, п ри чем длины промежуточных сторон так же, как и ди рекци он ные углы сто ро н хода, вычисляют независимо дважды по углам A , B и A ′, B ′ .
Коорди н аты пун кт ов м аги стрального х ода и боков ых точек вычисляют по изв естным фо рм улам через длины с торон и дирекци онны е углы.
При определении г е одезиче ски х координат оп орны х точе к способом з асечек угловые изме рения сле дует вы полня ть оптическим теодолитом (наприм ер, из фототе одолитн ого ком плект а) методом круговы х приемов с погрешностью поря дка 5-1 0″. В эт ом с лучае относ ительная погрешнос ть передачи координат точек хода и боковых пунктов обе спе чиваетс я 1:50 00 - 1 :1 0000. Измерять началь ный и конечный базисы с ледует с тальными ком пари рованными рулеткам и или лен тами в четыре п рием а с точн ос тью измерений порядк а 1 :20 00 - 1 :4000 (штриховые ленты).
3. 1 6. Для опре деления отмет ок б азисных , опорных и контрольны х точек при ан алитичес ком методе соз дания высо тного об осно вания (н априме р, способом мн огократ ны х бок овых засечек) с ле дуе т приме нять три гономет ри ческое нивелирование с изме рени ем угло в наклон а оптическим теодолитом с цен ой деления вертикального круга порядка 5″ . И змерени я при этом с ледуе т выполня ть при двух пол ожения х трубы (КП и КЛ ). К олебания зн ачен ия места н уля ве рти кальн ого круга при изм ерен ия х с одной станции не должны п ревы шать ±10″.
Фотографирование местности
3 .17. Перед произ водством фот осъем очных работ в 1-2 раз а в течен ие полев ого сез она выполняю т ра бочие пове рки фотокамеры и остальных приборов фототеодолитного компл екта (прил ож ение 1), а т акже опытное фотографирован ие для опре деления оптимальных величин экс поз иции в разли чн ых условия х освещенности в различн ое время дня. Опытное фотографирова ние произ водят при нескольких з наче ниях величины выдержки. Д ля оп ре делен ия приближенного значения вы держки следует использовать фотоэкспон омет р типа « Ленинград» или т аблицы выде рже к.
3.18. Пер е д выпо лнением фотосъемочны х работ составляют план работы на ст оянке с т аким расче том, чтобы фот ографи рование с каждой стоянки произ води лос ь в такое время дня, когда сект ор съемки освещен наи более благоприятно. При этом необходим о учитывать следующие обстояте льст ва.
1. Для п олучения однообраз ного по контраст ности изображения местн ост и на снимк ах при съ ем ке с левой и правой точе к базиса фотог рафиро вани я разрыв по времен и долж ен быть как можно меньше.
2. Наиболее благоприятным вре мене м дня при съемке я вляе тся так ое , когда тени минимальны и весь участок съемки ра вном ерно освещен солнцем .
3. Необходимо в н има тельн о с ледит ь за подвижным составом п ри с ъе мках станционной тер ритории, так как дым па ровоза или вы хлопные газы тепловоза, а также и сам подвижной состав могут за кры ть фотографируемые элемен ты с танци онн ой ситуации.
3. 1 9. П ри произв одстве фототеодолитной съемки в горн ых, оползн евы х район ах местности на каждой ф ототе одоли тной с тоян ке выполня ют с ледую щие работы:
- установ к у инструментов на базисны х точках;
- фотографиров а ние местности;
- измерение дл и ны ба зиса фот ографирования, угла наклона и угловую прив язку направления базиса;
- и змерение горизонтальных и ве ртикальных углов на конт рольные точки и другие пункты в соотв етствии с рабочим проектом или привя зку опорны х точек для построения разре жен ного планово-вы сотного об осн ования съе мки.
Ниже даетс я описание работы на фототе одолитной стоянке с на иболее распростране нным фототеодолитным комплектом « Photeo 1 9/131 8» по сущ ествующ ей методике, позволя ющей, кроме топографиче ских съемок ко согорны х рай он ов, в ус ловиях железнодор ожных станций или промышленных площадо к фотограф ировать с жесткой опоры разные ин женерные сооруже ния (путепроводы, переезды, отде льные здания и т.п.) .
Аналогично выполн я ют съе мку с фототеодолит ами VMK 10/1318, Tal , Г е оде зия. П ри работе с другими типам и камер (В ильд, Цейсс С -3б и др.) возможны нес уще ственны е изменен ия в отдельных опера циях.
П оследоват ельнос ть раб от при пр оизв одств е фотогра фирован ия след ующая:
1. Прочно устан а влива ют штативы с укре пленным и на них т регерами н ад левой и прав ой ба зисным и точками. Центриров ание инструментов тщат ельн о выполн яют с помощью отве сов.
2. В л е вой баз исной точке ус тана вливаю т на треге ре фотокаме ру и приб лиже нно гори зонт ирую т ее п о уровням, а в п равой - виз ирную м арку, ориен тировав ее в направлении базисов. Над фотокамерой укрепля ют топог рафи ческий зонт, закрываю щий корпус камеры от п ря мых солне чных лучей.
3. Измеряют высоту инструмента ( i ) н а д левой и правой точками при пом ощ и тесьмяной рулет ки. П риче м непосре дств енн о измеряют высо ту от цент ра до верхнег о обреза т регера - i 0 и для получ е ния вы соты инс трумен та к этому значению прибавляют пост оянную величину ( hi ), являющуюся расстоянием от верха трегера по оптической ос и объе ктива фотокамеры в нулевом по ложе нии. Для фотокамеры « Photeo 1 9/1318» эт а величин а hi = 11 см. С ледовательно, i = i 0 + hi , ч то и записывается в журн ал фотографирования (приложение 7).
4 . Устана влив ают з ритель ную труб у ориенти рн ог о устройства на заданны й угол относ ите льно базис а, руко водствуяс ь п ри эт ом метк ами с лучая съемки на корпусе к амеры ( A , AL , AR ) , и ориентируют фотокамеру в направ лени и съем ки, вводя в биссект ор о риентирного уст ройства м арку, установленную на правой точке базиса .
5. Уст а навлив ают объектив к ам еры по верти кали в по ложение, о пре делен ное при произ водс тве рек огн осци ровки, и, откры в кры шку мат овог о сте кла, проверяю т правил ьнос ть положения объе ктива и вертикальный захват местн ости . При необ ходим ости пе рем ещают объ екти в по ве ртикали, добивая сь нуж ного захвата по высоте .
6. Закр ываю т объектив к рыш кой, отводят прижи мну ю рамку от прикладной и сним ают рамку с м атовым стек лом.
7. Вставл я ют кассету с пластинкой, вы таскиваю т шторку кассеты и подают рамку с к ассет ой вперед до плотного п рилегания пластинки к прикладной рамке.
8 . На барабанчиках нуме ратора и регистратора вида съемки уст анавливают н омер стоянк и (снимк а) и случай съемки ( A , AL , AR или B , BL , BR ), эти данны е за нося т в журна л ф отог рафи рования.
9. Тщательно горизо н тируют к ам еру по уровня м, помещенным по контрольной площадке, и точно орие нти рую т зрите льн ую т руб у наводящим винтом к амеры на базисную марку. При эт ом необходимо предварительно проверить прави льн ость установ ки отс чета на ориентирном устройстве. Е сли п осле поворота к амеры уровни отклонились более чем на половину деле ния, их вновь устанавливают на середину и п роверяю т ориентировку.
10 . Осторожно с нимают к рыш ку объекти ва, производят экспони рование пластинки, пос ле чего вновь надевают крышку.
11. Отвод я т прижимную рамку, з акры вают касс ету шторк ой и вынимают кас сету из рамки п рижимног о уст ройства.
В такой посл е довательности вы полняю т съемк у при другом положении оп тической оси к ам еры относите льно направления базиса или при др угом полож ении объ ек ти ва по в ысоте.
З ак он чив фотосъем ку с левой точки, ф отокам еру снимают с трегера и п ереносят на правую точку, где ее устанавли вают взамен визирной м арки, не сним ая т рег ера, и аналогично произ водят фотос ъем ку.
В журнале фотографирован и я отм ечают дат у съ ем ки, ном ер кадра, пол ожение объектива, полож ение оптиче ской ос и отн осительно базиса, номе р кассеты , погоду и выдержку.
Есл и в процессе съемки произошли сл учайн ые нарушения полож ени я кам еры, то съем ку повторяют.
3.20. После фотограф и рован ия с обоих концов базиса (или до фотографирова ния, если это вызвано рез ким изменением ус лов ий освеще нности) производят из мерени е баз иса фотографирования.
Для этого вме сто фотокам еры на ш татив, не снимая трегера, устанав ливают те од оли т и з компле кта, а на место визир ной м арки предварительно собранную баз ис ную рей ку , которую с п омощью коллим атора ставят пе рпе ндикулярно направлению базиса.
При помощи теодолита м етодов повторе ний из меряю т параллактически й угол ε (рис. 17, а), поз воля ющий вы числить длину базиса по ф ормуле
![]() .
.
Для обеспе чения отн оси тельной погрешн ости оп ре де лен ия баз иса не гр убее 1 /20 00 необходимо вып олнить шес ть п олных повторений.
Рис . 1 7
Результат ы измерений з аписывают в журн ал и по ве личине полученного угла вычисляют длину бази са. Ее м ожно также опре делить по та блице расстоя ний, прил агаемой к фототеодолитному комплекту.
Е с ли длина бази са п ревы шает 1 30-1 50 м, то для повыше ния точности опре де ле ний базисную рейк у на дополните льном штативе сле дует установить приме рно по середи не ( рис. 17, б) и измерить два параллакт ически х угла на левой и п равой базисны х точках (ε1 и ε2). Величину базиса вы чис ляю т в этом с лучае по ф орм уле
![]() .
.
П ри длине баз иса до 50 м ег о измеряю т непос редствен но компарированной с тальной рулетк ой .
3.21 . Посл е опреде ления длины баз иса изме ряю т горизон таль ные и верти кальны е углы на контрольные и геоде зические точки. Наблюдения вып олняют одни м полным приемом, в к оторый вклю чаю тся: вторая базисн ая т очка, 1 -2 геодез ичес ких пункта (или точки м агистрально го хода), ко торы х определялис ь координаты этой базисн ой то чки, а также 2-3 контрольны х п ун кта для п ров ерки п рав ильнос ти ориентир ов ания ф оток ам еры по сп особ у к онтрольны х напр авл ений.
3.2 2. При произво дств е стерео фотос ъем ки п лос ких участков ме стн ост и с вы соких опор на каж дой стан ции выполняют сле дую щие работы :
1 . Устанавливаю т камеру на концах бази са фотог рафирования с з аданными углам и наклона на штативе или закре пляю т ее к элем ентам о поры с п омощью специа льной с трубцин ы ( приложение 20).
2. Ориентируют оси камеры в простра нс тве в со ответс твии с направлениям и, определенным и при рекогносцировке уча стка, ис польз уя при этом ориент ирн ое устрой ство, уровни и угловые шкалы на ст рубци не.
3. Фотографируют в по с ледов ательности, изложе нной вы ше. Ес ли при этом опора, на которой уста новлена или закре плена каме ра, не устой чив а и колеблется от воз дей ствия ветра и перем ещения на ней наб людат еля, т о к амера должна быть оборудована зат вором, а съ емк а произ водить ся на выс окочувствительных пластинках.
4 . Определяют и за писывают в ж урнал приближ енные зна чения элеме нтов линейного и углового ориентирования снимков (пр иложение 7).
3.23 . Если по каким-либо причинам (освещение , м ете орологиче ские условия, наличие подвиж ного сост ава н а участке съемки и т.п.) к моменту прихода на м есто съем ки фотографировани е производить неце ле сообразн о, то следует сменить сектор фотографи рования или выполни ть и зме рительные операции по привяз ке опорных точе к.
П ри наличии в фототеодолите индикато ра прижимов ЦНИИ Са (приложение 4) плотность прилегания кассеты с фотопластинкой к координатным меткам камеры фиксируетс я з аж иганием четырех лам п, рас полож енны х со ответственно ме ткам .
Полевые фотолабораторные работы и анализ негативов
3.24. Д л я выявления таких недоста тков фотос ъемки как неприжимы ф отостекла к прикладной рамке ка меры, плохое фотокачество, н еудовле творите льная компоновка де талей изображения производя т фот олаб ораторн ую о бработк у экспонированны х пластинок, как правило, в д ень съемки.
Для про я вления фотопла стин ок м ожно употреблять различные по сост аву проявляющие растворы, реце птура которых и описание процесс а фотолабораторных работ приводитс я в приложе нии 5.
3.25. Для полевого инж ен ерного дешифриров ания фототеод оли тн ых снимков с н егативов изгот авливают на матовой бумаге контактные отпечат ки.
3.2 6. Непос ред ственно после фо тообработ ки производят анализ и оце н ку фотогр афичес кого и фотограмметричес кого качес тв а негативов.
Н о рмально э кспонированны й и правильно обработанный негатив должен имет ь норм альную п лот нос ть и проз рачн ость, быть дос таточно контрас тным с прораб откой мелких дета лей, не иметь ву алей и механичес ких пов реждений эмул ьс ии (ца рапины, ополз ание эм ульсии и т.п.), пятен, полос и сдвигов и зображений.
Результаты фот ографического ан ал иза з аписывают в реги страци онны й журнал (прилож ение 8), в котором отме чают их фотокачество и пригодность для дальнейшей обраб отки.
Ос новна я цель полевой фотограмметр ическ ой оценки - вы явить н егативы, полученные при неплотном прилегании плоскости фотопластинки к при кладной рамке фотока ме ры (н еп рижим) . Для этой цели удобн о использовать эталоны, получе нные п ри пл отном прилега нии плас тинки.
Д ля опре деления величины неп рижим а в п олевых условиях исс ледуе мую и этал онн ую пластинки укладыва ют э мульс ией друг к другу, совмещае т координатны е метки обоих негативов по оси X - X и оц е нивают величин у нес овпадения п ри помощи из ме рительной лупы с точностью 0,05 мм.
Есл и расс тоя ние между координатными метками отлича ются от эталонного более чем на 0,1 мм для аналитичес кой к амеральной обработки и на 0,03 - при г рафо- механ ической, то съемку с ледует повторить и проверить с остоян ие касс еты, в которой была экспонирована исследуе мая пластинка.
Есл и фототеод олит оснащен индикато ром прижимов, принцип действия и черт ежи которого да ны в приложе нии 4, то полевой фотогра ммет риче ск ой оценк и негативов не п роизводят.
Результ ат ы полевого анализ а внос ят в журнал оценки качества не гати вов (п риложение 9).
Топографическое и инженерное дешифрирование снимков
3.27 . Дешифр ирование вы полн яют на контактных или увеличенных с нимк ах. Оно заключается в опоз на ван ии и з акрепле нии на снимка х пунк тов планово-вы сотн ой подготов ки и э ле мен тов ситуации, подл ежа щих из об раж ению на составляемых по ма те риалам фототеодол итн ой съемки топограф ических планов.
Ч а сть элементов и объектов, изобра зившихся на снимках, с одерж ани е которых не вызыва ет сомнения , де шифрирую т каме рально на основе стереоскопи ческого просмотра с нимк ов. Объекты, эле менты сит уации и рельефа, а также сооруже ния , ка чественное содержание которых при камеральном просмотре ус тановить не удается, оп озн ают на ме стности в ре зультате полевого д еш иф рирования снимков. П олевое деш ифрирование снимков выполн яют ка к путем об хода контуров и объектов, содерж ание кото ры х необ ходимо ус тан овить, так и в изуально с т очек фотогра фи рова ни я.
В резу л ьт ат е полев ого де ши фрирования на контактн ых ил и увеличенных отпе чатках показы вают:
- границ ы сельскохозяйст венны х угодий , сад ов, огородов , лес оп ос адок, л еса, кус тарн ика и т.п., с указа нием содерж ания контуров (порода леса, с редня я вы сота и толщин а де ре вьев);
- эле менты гидрогра фии (ре ки, ручьи, кана вы, ко лодцы и родники и т .п.), болота и з аболоче нные участки;
- д ороги с класс ифика цие й по категории и тип у;
- л инии связи и эл ектропе редач с указ анием коли че ства проводов ;
- ограж де ния с ука занием их типа (де ревянные заборы и из городи, к аменны е ограж де ния, живы е изгороди и т.п.);
- м осты и переправы с указ анием их те хничес ких характ ерис тик;
- отд е льные з дания с указ анием типа постро йки и хара ктера их использ ования.
В соответ с тв ии с д ополните ль ными тре бов аниям и при полев ом де ши фрирова нии с нимков м огут наносить э ле ме нты геологического строен ия учас тка, горизонты вы соких паводковых вод (при съемке мост овых перехо дов) и др уги е данные, устан авливаемые техни ческим заданием на съемку.
3.28. П ри опоз навани и объекта в проце ссе полевого дешифри рования е го контуры показы вают тушью на снимке: зе лен ой - для элементов гидрографии и черной - для ост ал ьн ых объектов, а содержан ие поясн яют условным з наком или подпи сью .
Эл емен ты сит уаци и и сооружен ия, из ображ ен ие которых на сн имке з ани мает площадь мене е 1 мм2, накалываю т на снимк ах и с обратной стороны нумеруют . Соде ржан ие э тих элеме нт ов поя сняется в специ альной ведомости дешиф рирован ия (п ри ложени е 10).
Е с ли отдельные э леме нты, полож ение которых необх одим о показать на топографиче ском плане, не изоб разились на сним ках, то в ра йоне их рас положен ия опознают на сним ке н е ме нее трех четких точек , к которым привяз ывают неизобразившийся элеме нт с итуации, по ложен ие которого на плане получаю т линейной з асечкой .
3.29. При прои з водс тв е ст ереофо тосъе мк и железн одорожных станций и промышленн ых площадок в результа те и нжене рно го дешифрирования оп озн ают и регис трируют:
- опорные точки с тщательно выполненным на обороте снимка абрисом;
- математические центры крестовин с указанием номера и марки;
- остряки, начала и концы рамных рельсов, предельные столбики и т.д.;
- точки на концах полевых поперечников;
- углы зданий и емкостей, постройки с указанием типа и характера их использования;
- опоры ли ний коммун икационных сетей, лин ии э лект ропередач со всеми необходимы ми сведениями;
- колодцы подземных коммуникаций;
- огр аж де ния с ука занием их типа и т.д.
Для опис а ния опознанных объе ктов на каждый сн имок составля ют ведомость дешифриров ан ия (п риложе ние 9), в которо й под номерам и, соответс твую щими поря дковым номера м объект ов на сним ке, дают их качественную хар акте ристику. Отдешифри рован ные элементы ситуации и их номе ра за крепляю т на с нимке туш ью.
Полевая документация
3.30. В р ез ультате выполне ния полевых работ должны быть полу че ны с ледующие мат ериалы:
- исполнительная схема выполненной фототопографической съемки;
- схема геодезического обоснования съемки;
- полевые журналы геодезической подготовки;
- ведомости вычислений геодезических координат и отметок пунктов съемочного обоснования и опорных точек;
- журналы фототеодолитной съемки;
- ведомости дешифрирования съемки;
- ведомости анализа негативов;
- негативы фототеодолитной съе м ки и контактн ые снимки с рез ультатами дешифрирован ия .
3.31 . Схему в ыполненной фототопографической съемки с оставляют в результа те уточнения рабочего прое кта съемки. Ба зисные и опорные точки нанос ят по результатам геодезических измерений. Границы секторов съ емки, в соответствии с в идам и выполн енн ой с каж дого баз иса с ъемки фотографирования, наносят н а основу с помощ ью транспортира.
На схем е геодез иче ского об основания для оп ределения правильности и точност и проведен ных геодез ических работ показы вают зна чения пла новых и высотных невязок.
3.3 2 . Па ры негативов подбира ют в соответс твии с видами съемок и укла ды вают в к оро бки, на которых указы ваю т пе ре чень содерж ащ ихс я в ней м атериа лов , номера ба зисов и снимков .
IV . КАМЕРАЛЬНАЯ ОБРАБОТКА МАТЕРИАЛОВ НАЗЕМНОЙ СТЕРЕОФОТОСЪЕМКИ
4.1 . В зависимо сти от задач, методики с ъемки и геодез ической под готовки, а также наличия стереоф отограмм ет риче ск ой а ппа ратуры обра ботку снимков вып олняют оп тико -механическим, аналитическим или граф о-аналитическим способами.
Оп тик о-м еханич еским путем обрабатывают снимки, полу ченные при нормальн ом и равноотклоненном с лу чаях съемки, составлении топографи чески х или фрон тальных пла нов и профиле й к рутокосогорны х и приж имны х участков изы скиваемы х т расс.
Матери а лы ориентированной стереофо тосъе мки при произв ольны х, но изве стны х значе ния х базисов и ЭВО с ним ков, а также н еори ен тированной, но обеспеченной пунк тами геодезическ ой подготов ки съем ки обра батываю т аналитическим и гра фо-ан ал итическим методами . При этом вычисления вы полня ют по специальным програм мам на ЭВМ.
4.2. Предварительн о, на основе исполните льной схемы выполненной съем ки , намечает последователь ность обраб отки сним ков по участкам . В соответствии с этой последовательностью подбираю т снимки по стереопарам и подготавливают рабочую основу для с оставления пла нов или специ ал ьны х изме рений по стереомодели местности.
Кроме координ а т и отметок точек геодез иче ской основ ы съемк и, по результатам полевых из мерений вы числяю т ди рекци онны е углы вс ех баз исов и координа ты левы х це нтров фотографирования и составля ют со отв етствующую ведом ость. Для обраб отки неориентированны х с нимков находят приближенные значения ЭВМ в приня той для об раб отки с истеме координат.
Составление топографических планов оптико-механическим способом
4.3. О бработка сним ков на сте реоавтог рафе при состав лении топ ографических планов включает сле дующие п роцессы :
- подготовительные работы;
- сгущение сети контрольных точек;
- установку снимков в приборе и ориентирование планшета;
- ориентирование стереомодели по контрольным точкам;
- рисовку ситуации и р е льефа.
4.4. Подготовите л ьные ра боты с остоят из следующих процессов пров ерки исправности стереоавтог рафа:
- выполнения его рабочих поверок;
- подготовки рабочей основы для ориентирования стереомодели;
- проверки постоянства элементов внутреннего ориентирования снимков;
- составлени я плана.
Исправност ь ст ереоавтографа проверяют пос ле значительного пере ры ва в работе приб ора; при этом следует тщ ательно очи стить все направляющие и оп тическую систем у от пыли и смазать трущие ся части прибора тонким слоем специального масла. Одновре менно пров еряют исправн ость с истем ы освещения и сигнализации, состоя ние оптики, плавкость дви жен ий и отсутствие « люфтов» . Затем выполн яют рабочие поверки стере оавтографа, порядок и способы п роведения которых даются в приложении 15.
4.5 . По дгот овка ра бочей основы з аклю чается в н ан есени и на съем очны й планшет по к оорди натам контрольны х и баз ис ны х точе к, т очек рабоче го о бос нования (м агистральны х ходов или аналитичес кой се ти) и точки, фикс ирую ще й нап равление оптическ ой оси снимка или одно из контрольны х направ лений (рис. 18) . Для фикс ирования на планшете н аправ ления оптическ ой оси или контрольного направл ения вы чис ляю т координаты точек на этом н аправле нии в ближ нем и дальнем план ах с ектора с ъем ки:
где Xs л , Ys л - коорди н аты левой баз ис ной точки;
S - ра с сто яние от базис а до границы съ ем ки, окру гле нное до 50-1 00 м;
σ0 - дирекционный угол направления оптиче ской оси (или контрольног о напра вления).
Разб ивк а сетки к оордин ат и нанес ение точек на планшет произ водится к оординат ограф ом .
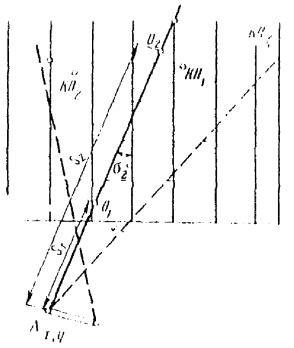
Рис . 1 8
4 .6. Для уста новки сним ков в прибо ре из кас сет извл ек аю т снимкод ержатели и устан авливаю т их н а световой пульт. На ст екло сн имкодержателя эмуль си ей вниз укл адываю т негатив и цент риров очным п рибором пе ремещ ают ег о в п олож ение, ког да штрих и на стекле сн имкоде рж ател я совпадаю т с центрам и координа тны х ме ток негатива (р ис. 19).
Рис. 19
После ц е нтрирования не гати вов в снимк одерж ателе их устанавли вают в к ассеты прибора. На отс чет ны х барабанчиках стере оавтограф а ус танавливают величины элем ентов внутре ннего и внешнего ориентирования - з наче ние фокусных расстоян ий, величину конве ргенции γ, баз исн ые с ос тавля ющие BX , BY , BZ , а также величину сме щ ен ия объектива кам еры по ве ртикали в м ом ент съ емки с каж дой т очки. Величину баз исны х с оставляющих рассчитывают в з ависимости от углов скоса и п ревыше ния концов бази са фот ографирования по формулам :
![]() ;
;
![]() ;
;
![]() ,
,
гд е B - гори зо нтальное положе ние базиса;
φ - угол скос а;
Δh - п ре вышение правого центра проекции над ле вы м;
t м - з н амен атель мас шта ба модели, построе нной на стереоавтог рафе.
Знач е ние мас штаба моде ли выб ирают в з ависимости от отстояний до с нимаем ого участка и заданного ма сштаба план а по табл. 4.
Таблица 4
|
М асшт аб сост авляем ого плана |
Пред е льные отстояния |
Масштабы модели |
Увеличени е на координатографе |
|
1:500 |
200 |
1: 500 |
1, 0 |
|
4 00 |
1:1 000 |
2,0 |
|
|
1: 1000 |
400 |
1:1000 |
1 ,0 |
|
800 |
1:2000 |
2,0 |
|
|
1:2000 |
4 00 |
1:1000 |
0,5 |
|
800 |
1:2000 |
1, 0 |
|
|
1 6 00 |
1:4 000 |
2, 0 |
|
|
1 :5000 |
1000 |
1:2500 |
0,5 |
|
20 00 |
1:5 0 00 |
1 ,0 |
|
|
4 000 |
1: 1 0000 |
2,0 |
Ес ли превы шение концов баз ис а в поле не изм еря лос ь, т о величину BZ у с та навливают устранением попере чного параллакса при стереоск опиче ском наблюдении модели движением винта BZ ; составл я ющие BX , BY перед этим должны бы т ь ус тан овле ны .
После у с танов ки на стереоавтогра фе элементов внутреннего и внешнего ориентиров ания установочные у стройства закрепляют зажимными винтам и.
4.7 .
Когда м одель в приборе построена, необ ходимо ориентир овать отно сительно нее п ланшет с рабоче й осн овой. Для этого исп ользуют
точки, фиксиру ющие н аправлен ие опт ической оси ле вог о снимка . При отключенном ко ординатографе марку м икр оскопа координатографа
совмещают с осевой точкой, рас положенной в б лижнем
плане. З атем дв ижением по оси Y перем е ща ют марку н а точку оси, располож енную в дальнем плане, повора чивая планшет до те х пор,
пока направление дв иже ния черте жного устройс тва по оси Y не со в паде т с направ ление м оптиче ской оси левого сн им ка на планшете. Методом
последовательного приближения, переходя от одной
точки к другой, добиваютс я положения, при котором направлен ие дв ижен ия чертеж ного устройств а сов падает с направлением опти ческ ой оси ле вого снимка. После этого планшет закрепляю т, а на счетчик ах приб ора уста нав ливают от счеты: штурвалом
на оси X - отсчет 500,00, ° , ш турвалом
на оси Y - отсчет, равн ы й
рас стоянию до одной из точе к на ос и с ним ка в м асшта бе модели ![]() . Совм естив марку
координатографа с этой точкой на планше те, п рисо единя ют координатограф к п ри бору при вы бранном коэффициенте увеличения ( 0,5; 1, 0; 2,0). Если при этом
марка координатографа не уста навливаетс я на точку, фиксирующую полож ение оси съемки на планшете, то ее подправляют установочными
винтами.
. Совм естив марку
координатографа с этой точкой на планше те, п рисо единя ют координатограф к п ри бору при вы бранном коэффициенте увеличения ( 0,5; 1, 0; 2,0). Если при этом
марка координатографа не уста навливаетс я на точку, фиксирующую полож ение оси съемки на планшете, то ее подправляют установочными
винтами.
4 .8 . Для орие нтирования модели относите льно геодез ичес кой ос новы планшета дост аточно имет ь три контрольные точки на дальнем плане обраб атыв аем ого учас тка (рис. 20).
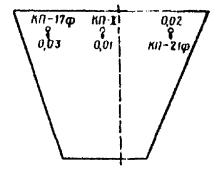
Рис. 20
Ориентиро в ание модели по контрольным точкам вы полняют в с ледующем порядке.
1. Наводят стереос копичес ки марку на контрольную точку 1 и п ри помощи установочного микрос копа опреде ляют величину нес овпадения марки микроскопа с точкой 1 на планшете. Ес ли расхожд ен ие в полож ении точек по оси X превышает 0,2 мм на планшет е, то движен ие м штурвала на ос и Y перемещают марку микроскопа до с овп адения с точкой 1 на планшете. Если при этом смещ ен ие марки относительно наблюдаемой контрольной точки на модели будет меньше +1 мм, то совмещение марки с изображением контрольной точки достигается путем пе ремещения правого негатива по оси X при б ора.
П ри больших отклон ениях марку наводят на изображение т очки измен ени ем угла конве рген ции .
С овме щение марк и на модели и план шете с наб людаем ой кон трольной точкой осуществ ля ют до тех пор, по ка о ши бки несовмещения будут менее 0 ,2 мм.
2. Н аведя ма рку на из обра жение точки 2, проверя ют совме щение марки микроскоп а с положением этой точки на планше те. Ана логично изложенном у, наводят м арку м икроскопа на точку н а планше те, а в озн икшую погрешность, боль шую 0,2 мм, лик видируют движен ием BY плановой линий ки .
3. При уд овле тв орите льном каче стве негативов точка 2 является контрольной - при наве дени и м арки на е е из обра же ние на модели, величина сме ще ния на п ла нше те не должна пре вышать 0,4 мм и ра спре деляе тся устан овочны м микроскопом одинаково на все точки.
Пр и больших отклонениях проверя ют правильность в ычи слен ия координат и нанесения кон трольных точек, а затем повторяю т орие нтиров ание.
4. Если после ор ие нтиро вания модели по оси Y ( 1 -3 пункты ) воз никли погрешности в положении точе к по оси X , прев ы шающие 0, 2 мм, то планше т поворачивают на ве личину среднего арифм етиче ского из отклоне ний на всех трех точках, после этого величина отклонения на каждо й из контрольны х точек не долж на превы шать 0,2 мм, а точка на оси в ближнем пла не (вокруг которой поворачивается планшет) не долж на п олучить с ме щение более 0 ,1 мм.
5. В ы полняют контрольные наб людения на все точки ос новы, имею щие координа ты; расхождения в положении точек в п лане не должны превышат ь 0,4 мм.
6. Дл я ориентирования м одели по высоте барабан счетчика вы сот устанавли ва ют по масштаб у м одели, указ ате ль поло жения левого объектива ставя т на нуль, а измерительную марку с овме щают с о дной из м еток по оси X - X . В таком поло ж ении на счетчике в ыс от фиксируют отметку гориз онта инс труме нта в момент съемки. Затем указа те ль положе ния объ ектива вно вь пе реводя т на с оотве тствующи й отсчет. Наведя стереос копичес ки марку на контрольную точку 1, движе нием ножного ш турвала устан авливают ее отме тку. Ма рка долж на совпада ть с моделью в точке 1. Аналогично проверяют правильность фотограмм ет рических высот в точках 2 и 3. Ес ли марка отклоня ется от контрольных точек на величину, не превышающую 1/4-1 /5 от принятого сече ния ре льефа гориз онталями, то м одель по высоте ориентирована удовлетворительно.
При больших р а схож дениях в точке 1 после того, как ножным дис ком устано влена ее ге одезическая отм етка, м арку наводят на модель перемещением лев ого о бъе ктива, а возникающий поперечный па раллакс ус траняют перемещением правого объектива. Полученные при наблю дении точе к 2 и 3 разности высот распре деляют рав номерно из менением установки счетчика высот. При з начительных расхож дения х в отметк ах контрольных т очек прове ря ют в ы числ ения отм ет ок горизонта инст рум ен та и контрольны х точек .
В е личи ны отклон ен ий при наб людении вс ех кон трольных точе к в плане и по выс оте записы ва ют в журнале об работ ки сним ков на стереоавт ог раф е (п риложе ние 16).
4.9. По с ле ориентиров ан ия м одели в ст ере оавтографе по контрольны м точкам производят рисовку ситуации и ре льефа.
С ос тавл ени е план а начинают с перенесения ситуации н а пл аншет. Для э того предва рительно прос матривают грани цы контура на стереомодели, ис пользуя данны е полевого дешиф рирован ия. З атем, с овм естив марку на м оде ли с одной из точек кон ту ра, н ожн ой пе далью опус кают острие каран даши на планшет. Одноврем енным движен ием штурвалов по оси X , Y и н ож ным ди ск ом Z пере м ещают марку по границе контура так, чтобы она вс е время касалас ь поверхности моде ли.
Та ки м образом, на пла ншете получают из ображ ение контура местности, сод ержан ие его поясняют надписью или ус ловным знаком . Контуры искусств енных сооружени й правильной геом ет ричес кой форм ы (з дания, заборы, линии связи и т.п.) получают набором точек на углах поворота, которые з атем с оединяют прямыми линиями.
Мал ы е по площ ади элементы сит уации наносят в соответс твии с н ако лами на поле вых отпе чатках и ведомостя ми деши фрирования.
4.10 . Рисовку рельефа выполня ют пос ле с ос та вления контур ной части п лана , начина я с элементов, не из ображ аю щихс я горизонтал ями (бровки скальны х обрывов , отд ельные скалы и большие камни, п ромоины) . Эти элемент ы з арисов ыв ают аналогично элеме нтам ситуации, но обя зате льн о с набором пикетн ых вы сотны х точек. Затем модель м естности просматривают, что бы опреде лить формы и характер рельефа и лучшее изобр ажен ие его гориз он таля ми. Одноврем ен но произ водя т набор пикет ов на характе рных т очк ах и ли ниях релье фа. П ри этом измерительную м арку нав одят на характерную точку м одели, положение ее на планшете фик сирую т включением ножной педали, а вы сотную отметку сним ают с о счетчика высот. Для п овыш ени я точности получения отме ток х арактерны х точек наведе ни е на к аждую точку выполняют дважды и на п ланшет выписывают среднее зна чен ие получе нной отметки.
Таки м образом, набирают ря д пикетных точек на вершинах и пон ижен ия х, по тальвегам логов и вдоль линии водораз делов.
Гори з онтали, в завис имости от характе ра растительного покрова на сним ае мом учас тке, из ображают либо непрерывным проведе нием марки по модели, либо по пикетам .
В первом случа е, на открытых склонах, на счетчике выс от ус танавливают отметку горизонтали, м арку с тереос копически наводят на модель вблизи одной из границ рабочей площади пары, кар андаш ножной п едалью опус каю т на планшет и движения ми шту рвалов по оси X и Y п е ре ме щаю т ма рку по м одели так, чтобы она все вре мя касалась по верхн ос ти. Пос ле проведения первой горизонтали на сче тчи ке выс от устана вли ваю т отметку следующе й горизонтали и аналогичным образом выче рчивают ее на план шете.
На участках с одн о образн ой крутизн ой сним ков м ожно не посред ственно полу чать вторы е или пя тые гориз онта ли, а пром ежуточные проводить интерполированием.
Если участок м естности покрыт сплошным кустарником и пове рхность зе мли не просматривает ся, горизо нтали рисую т методом трасси рования, уста навливая на счетчике высот отм етку, равную отметке проводимом гор изон та ли, увеличенной на сред ню ю выс оту к устарн ика. Среднюю выс оту кустарника дает разн ость показаний счетчика вы сот при наведе нии марки на верх кустарника и по верхность земли в нескольких точка х на границе кустарника.
4 .11 . После рисов ки с итуации и рельефа составленны й план прове ря ют набором контрольных пикетов равном ерно по площади сте реопары на точка х, харак те рны х по ре льефу. Расхождения в отм етках пикетов и отметках, получе нны х интерполяцией м еж ду гориз он та ля ми, не долж ны превышать 1 /3 приня того сечен ия ре льефа, а на к ру ты х склонах разн ос ть отм еток м ежду точками п ерег иба долж на соотв етств оват ь числу проведенных горизонта лей.
Расхо ж дения в положении контурных точек не должны пре вы шать 0, 5 мм в м асшта бе плана.
При обработк е стереопар, смежных с уже обраб отанны ми участками, правильн ость рисовки с итуации и ре льефа прове ря ют по сводкам со сме жным и стере опарами до начал а составления плана на обраб аты ваем ой сте реоп аре.
Расхождения по сво д кам меж ду сосе дними стерео парами не долж ны превышать уд военны х величин допус каемых рас хождений для контрольных пикетны х точе к, т.е. по высоте не более 2/3 сечен ий релье фа и 1 мм в плане. Гориз онтали сводя тся осредне ние м рас хо жде ний на стыках.
4 .1 2. Уча сток плана, проконтрол иро ван ны й набором контрольны х пикетов и све денны й на гра ницах смежных сте реопа р, в ыче рчива ют ка ран даш ом . При этом кон турную часть плана обозначают условными з на ками , а гориз онта ли - в соотве тствии с правилам и топографи че ского черчения.
4 .13. Из других приборов графо-ме ханическ ог о метода при обраб отке с ним ков наземной сте реофотос ъемк и можно использов ать ст ереопланиграф и стереом етрограф.
4.14. М асшта бы модели при обраб отке снимков на стереопл аниг рафе могут ко лебаться в больши х пределах, чем на стереоавт ографе; зн аче ния м асштабов и предельны е отстояния привед ены в табл. 5.
Т аб лица 5
|
Мас штаб пла на |
П редельн ые отстояния |
М асш таб мо дели |
Коэффи ц ие нт увеличе ния координатогра фа |
|
1:300 |
300 |
1 :500 |
1 |
|
450 |
1:750 |
1 ,5 |
|
|
600 |
1: 1000 |
2, 0 |
|
|
900 |
1: 1 500 |
3,0 |
|
|
1: 1000 |
600 |
1: 1000 |
1 |
|
12 00 |
1:2 000 |
2,0 |
|
|
1 800 |
1: 3000 |
3,0 |
|
|
1:2 000 |
1200 |
1: 2000 |
1 ,0 |
|
2400 |
1 :4000 |
2,0 |
|
|
3 600 |
1: 5000 |
3,0 |
|
|
1:5 000 |
3000 |
1: 5000 |
1 ,0 |
|
9000 |
1:1 5000 |
3,0 |
Пределы обра б отки отс тояни й по б лижнем у плану равны 1/4 от предельных отс тоя ний , указанных в табл. 5.
Ори е нт ирование фот оте одолитных сни мк ов в сте реопланиг рафе требует тщательной юс тировки приб ора и точного определения нуль-пункт ов всех шкал. П еред ориент ированием и обработкой сн им ков о си стереопланиг рафа переключают таким образ ом, чтобы счет чик, фиксир ующий высоты при об работке аэросн имков, показы вал значения отс тоя ний ( Y ), а одну из о се й координатографа не обходим о подключить к этой оси, другая же ост ается подключенной к ос и X .
Негат ивы точно ориентируют по шт рихам на стеклах снимк одерж ат елей, кот орые смещаются в кассет ах в направ ле ни и оси Z на величину, ра вн ую , но п ротивополож ную по з наку ве ртикальном у с ме ще нию объе ктива в момент съемки. Фокусные расс тояния проектирующих камер устанав ливают на отсчеты , рав ные фокусны м рас стояниям ф ототеодолитных сним ков.
На шка л ах углов нак лона, скоса и поворота обеих камер, а такж е BY и BZ у базисной каретки л е вого сним ка ус танавливают нулевы е отс четы, а на правой каретке - з наче ние баз исных составляющих BY и BZ выч исленные по формулам , приве денным для стереоавт ог рафа. Аналогично вычисляют и уст ан авл ивают отс чет BX .
О риенти ро вани е вы полняют обычным и п рием ам и, п уте м ус транения п оперечных параллаксов движ ениями x . Если при наблюдении точек моде ли возн икаю т остат очные поперечные па раллаксы, их устра няют движение м BZ . Ориен т иров ание планшета отн оси те льно модел и и подключение координатографа производит ся так же, как и для стер еоавт ографа.
Аналогично в ы полняют ориентир ова ние м одели по контроль ным то чкам. При этом расхождение в пол ожен ии контро ль ных точек в плане ст абилизи руют движе ни ям и BY и с к осом прав ой камеры. Ра схожде ния в полож ении т очек по высоте ликв иди руются одновре ме нны м н ак лон ом п ро ект ирующи х камер на угол Δω.
При зн а чительны х рас хож дения х точек по выс оте н а ст ереопл ан иг раф е м ожно произ водить горизонти рование модели мето дами, которые применя ются при о б ра ботке аэрофотосн имков. План на ст ереопл аниг раф е с ос тавляют аналоги чно из ложенному для стер еоавт ог рафа.
4 .1 5. Обра ботка ф от от еодолитны х снимков с нек от орыми ог рани чениями возмож на и на стереометрог рафе.
Известные из полевы х работ элементы вне шн ег о орие нти ров ани я снимков устанав ливаю т не посредств енн о на прибо ре.
Если прибор не снабжен сн имкодерж ателями формата 13 ×1 8 см, т о для точной центриров ки снимков тонком и глой накаливают п оложение главной т очки, которую совмещают цен тром де рж ателя, а с ним ки закрепляют на держате ля х с пом ощью плас тил ина.
Нега т ивы закладывают эмульсионным слоем в низ таким образом, чтобы сн имок лев ой точки ф отографи рован ия с базиса находи лся на левом сни мкодерж ате ле.
Прав ы й сним ок закл адывают в правый снимкодержатель.
Точно е ориент ировани е произ водя т по начальным направлениям, ра зворачи вая сним ки движе ниям и x .
Для изм е ре ни й по полученной сте реомоде ли п роиз водят смену к оор динат Y н а Z с по м ощ ью переключателя YZ .
В ре з ультате, п ереме щения по ос и Y о с уществ ляют ножным штурвалом, а по оси Z - правым.
Ко нс труктивно ст ере ометрог раф позволяе т осуществ лять перемещение по оси Z в пределах 1 80 м м, чт о не всегда удо влетворяе т условию отдель ны х случаев съемки. Для рас ширения диапаз она об раб атыв аемых отстоя ний м ожно применить а ффинное преоб раз ование м одели.
Аналитическая обработка снимков с использованием ЭВМ
4 .1 6. При аналит ичес ких методах об рабо тки сн имков измерения вы полн яют на стереокомпараторе, а для вычис лений использ уют ЭВМ , об ладающую соответ ст вующим объемом памят и. Ан алит ическая обрабо тк а мат ериалов наз емной стереоф отосъемки произ водится дл я сг ущ ения сети опорны х точек при съемке труднодост упных прижимов и косогоров, при обраб отке снимков конверге нтной съ ем ки ополз не вых учас тков и при съёмке плоских те ррит орий с вы соки х опор. П ри этом в зависимости от точнос ти определения значений базиса ф отографирования и ЭВ О с нимков мож но использова ть формулы, соотве тс твующие ориентирова нной или неориентирова нной стереофотосъ емке.
4.17. С нимки ориенти рованной ст ереофотосъемки пре дварительно провер яют на прави льность элеме нтов внутре нне го орие нтирования каме ры, приж им пла стино к к прикла дной рамке и соответствие ЭВО заданным зна че ниям.
4 .1 8. П рижим ф отопла стин ок к прикладной рамке камеры в пр оцессе фо тогра фир ования контролируют с пом ощь ю с пециа льно устанав ливаемого э лектричес кого индикатора прижима, описание которого дано в прилож ении 4. Исп ользование индикатора п рактически ис ключает в оз можн ость полу чения снимков, отклоняющи хся от плоскости прикла дной рамк и более чем на ±1 5 мкм.
4.1 9. Если п ри съемке индикатор прижима не использовали, то отклонения плоск ости снимка от прикладной рамки каме ры на ходят пу тем сравнения рас стояний меж ду координа тным и мет ками не гативов L г с эталонными р а сстоя ниями L 0 г (рис . 21) . Если ра зность Δ L = L г - L 0 г не превыш а ет 0,03 мм, то элеме нты внутреннего ориен тиро вани я считаются неискаж енны ми. Если же ΔL > 0,03 мм, т о опред еляю т поп равки, необ ходим ые для пе рехода от элемент ов внутреннего ориентирования камеры к со отве тствующим элеме нтам ориентиров ания снимков. В случае оптик о-механи ческ ой обраб отки с нимков определяют лишь поп равку δ f к фоку с ному рас стоянию кам еры
![]() . (18)
. (18)
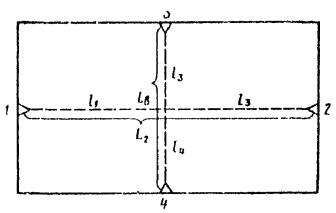
Рис. 21
П ри ан алитическ ой обработк е сним ков н аходя т поправ ки к элемен там внутренн его ори енти рования сни мк ов :
 (19)
(19)
гд е L 0 г - расстояние ме ж ду горизонтальными метк ами, известное из исс ле дова ния фот оте од олита,
L 0 в - т о же, между вертикальны ми метками
L 0 1 , L 0 2 , L 0 3 , L 0 4 - ра сс тояния, получен ные при исс лед ов ани и фототе одолит а.
4.20 . Для определения правильности приня тых зна чени й эл ементов внутрен него ориентирова ния камеры и ее у глов ого орие нтирования в п роц ессе съ емки используют способ контрольны х нап равлен ий, изм ерения к оторых производя т те одолитом в п роце ссе вы полнения полевы х раб от.
4 .21 . Фот ограммет рические координа ты точек контрольн ых направ лений получают по измеренным теодолитом вертикальным и гориз онтальным углам
![]() ;
; ![]() , (20)
, (20)
где α′ - горизонтальный угол ме жд у н аправлением оптичес кой ос и камеры и нап равлен ием на наблюдаемую точку;
β - вертикальный угол на эту же т очк у.
Горизон т ал ьный угол α′ определяетс я из выражения
α′ = α + δαц,
гд е α - угол, измер енны й те одолитом, устан овле нн ым на штатив на место фотокам еры ;
δαц - поп равка з а внец ентренность передн ей уз ловой т очки объект ива фотокам еры, определяемая из выраже ния
![]() , (21)
, (21)
гд е Y - приближенное значение о тсто яния до н аблю даемой точки м ;
0,1 - расстояние от оси вращен ия фотокам еры до передней уз ловой точк и объектива (для фото каме ры 13 ×1 8), м.
В табл. 6 даны з начен ия поправок δαц с точностью до 1-2″.
Табл ица 6
|
Y м |
α , град. |
||
|
10 |
1 5 |
20 |
|
|
200 |
20″ |
25″ |
35″ |
|
400 |
1 0 |
1 5 |
1 5 |
|
800 |
5 |
5 |
10 |
|
1200 |
3 |
4 |
5 |
4. 22. Для определения э лем ентов внутреннего ориент ирования фотокам еры и прав ильн ости е е углового ориентиро вания с помощью сте ре окомпарат ора измеряют координат ы точек контрольн ых направлений ( xi , zi ). При этом в общем случае должно быть не м енее тре х конт рольны х направлений. Если элем е нты в нутреннего орие нти рова ния извест ны, то для определения ошибок у глового ориентирования ка меры не обходимо иметь не менее двух контрол ьны х нап ра вле ний. П оправки к п риближ енн о известны м элементам вн утренн его и углового ори ентирования ф отока ме ры нах одятся из реше ния ура внений поп ра вок:
 (22)
(22)
где xi , zi - измеренные координаты т очек конт рольны х направлений
lxi = x0i - xi; lzi = z0i - zi
П ри определе нии только поправок углового о риен тиро ван ия в уравн ен иях ( 22) исп ользую т по четыре п оследних члена. Если свободные члены уравнений ( 22) l x = lz ≤ + 0,02 мм , то приня тые элеме нты внутренн его и углового ориентир ован ия с читаю тся точными. Предварите льное определение вычисленных по измеренным углам координат точек контрольных направлений и сравне ние их с измеренным и на снимке выполняю т в соответс твии с приложе нием 12.
Есл и lx = lz ≥ 20 - 30 м км , то по правки к приня тым элеме нтам п роекти рования нах одя т из ре шен ия сис темы уравнений погрешности вида ( 22 ) на ЭВМ. П олу ченные таким об раз ом попра вки и спользуют п ри дал ьн ейшей а на литической обра ботке снимков.
4. 23. П ри съемке прот яженных косог оров с ра зреженным геодез ическим обос нованием для к онтроля правиль ности углового ориентирования камеры на каж дой станции опреде ля ют не м енее двух контрольных направлен ий. Для определе ния стаб ильности элементов внутре ннего ор иен тировани я на т рех- четы рех станция х из меряют не мен ее четы ре х контрольных направлений.
4.24. Сгущение се ти оп орны х точек при съемке протяженных косогорны х учас тков п роизводя тся путем посл едовательно го соединения н езави симых мод ел ей, п ост роенных в общей системе фотограмметрических координат с частными началами. Для этого выполняется ориентировочная стереофотосъемка косогора, преимущественно при нормальном и равноотклоненном случаях съемки. Значения базисов фотографирования и их ориентировку (дирекционные углы) в принятой системе координат находят из полевых измерений.
Работы по построению опорной сети состоит из следующих основных этапов:
- составления проекта и подготовки снимков;
- измерения снимков на стереокомпараторе и подготовки исходной информации для вычисления на ЭВМ;
- построения на ЭВМ опорной сети в фотограмметрической системе координат, ее уравнивания и геодезического ориентирования;
- вычисления геодезических координат опорных точек и координат центров фотографирования.
4.25. При составлении проекта сгущения опорной сети отбирают стереопары, покрывающие весь участок съемки без фотограмметрических разрывов. На снимках намечают опорные, контрольные и связующие точки, необходимые для соединения смежных стереомоделей в единую сеть. Одновременно определяют приближенные координаты левого центра фотографирования первой модели участка и приближенный угол поворота x 0 между соответствующими осями фотограмметрической и геодезической систем координат (рис. 22).
Рис. 22
4.26. По измеренным на стереокомпараторе координатам опорных и связующих точек находят пространственные фотограмметрические координаты ( Xi , Yi , Zi ) точек каждой модели ряда с и сп ольз ование м выражений ( 1); при этом для вычисления берут значения угловых ЭВО снимко в , уточненных на основе измеренных конт ро льн ых на правлен ий.
Каждую моде ль строят в общей системе фотограм метри ческ их ко ординат, направление оси абсцисс ко тор ой совпа да ет с направ ле нием базиса первой моде ли, а ди рекционными углами базисов являются соответствующие разности измеренных дирекционных углов (см. рис. 22). Начало координат каждой модели совпадает с левым центром фотографирования.
Соединение моделей в ряд выполняется путем последовательного нахождения координат левых центров фотографирования моделей по одноименным связующим точкам, одна из которых должна располагаться на ближнем плане стыка смежных моделей. Алгоритм построения опорной сети при съемке протяженных косогоров с использованием ЭВМ приведен в приложении 17.
4 .27. Сн имки конвергентной съемки, выполняемой при исследовании оползневых участков, об раба тываю т ана лити ческ им ме тодом. При этом для ко нтроля за п рижимом пластин ок к прикла дн ой рамке камеры и определения прав ильнос ти уг лов ого ориен тирования камеры в процессе съем ки на каждой станции измеряют не менее че ты рех контрольн ых нап равлений . К оординат ы точек получают на основе вы ражений ( 1) ил и ( 4) с использованием уточненных по контрольны м направлениям значений ЭВО.
4. 28 . Снимки с приближенно известными ЭВО, получае мы е при съемке с высоких оп ор терр итории железнодорожных станций и д ругих плоских учас тков земной поверхности со сложной ситуацией, обраба тываю т ана лити чески м ме тодом с построением моделей, геодезическое орие нтирование которы х выполняют по оп орным то чкам. П ри этом используют завис имос ти, приведенные в п. 17.
А лгори тм аналитической обработки снимков наземной стереофотосъемки приведен в приложении 18.
4.29 . Топ ографи ческие план ы, продольные и поперечные профили и другую графическую документацию п ри ана лити чески х методах об ра ботки материалов наземной стереофотосъемки получа ют на основе геодезических координат точек, вычисленных с помощью ЭВМ. При съемке железнодорожных станций топографический план составляют пикетным способом с нанесением на основу получаемых геодезических координат точек ситуации и рельефа. План сортировочных горок составляют методом поперечников.
4.30 . Необходимые при крупномасштабных съемках железнодорожных станций и промышленных площадок линейные обмеры инженерных сооружений выполняют также путем измерения снимков на стереокомпараторе. При этом необходимые данные получают либо аналитически, используя разности координат соответствующих точек, либо графически, выполняя построения в крупных масштабах.
Т аким путем о бмеряют ст релочные переводы и определяют координаты их центров. В этом случае по найденным из аналитического решения ко ордин атам математического це нтр а, ос трика, концов рельс и нескольких точек на нитках смежных пересекающихся путей (рис. 23) строят эпюру стрелочного перевода в масштабе 1: 100. Коор динаты центра перевода ( ЦП) п олучают затем по эпюре в точке пересечения осей путей с линией, проходящей через математический центр крестовины (МЦ) и предельный столбик. Равенство расстояний между математическим центром крестовины и центром перевода, известным для данного типа крестовины, служит контролем правильности определений. Марки крестовины находят по углу пересечения отклоненного и основного путей. При необходимости вычисляют координаты флюгарки.
Р ис. 23.
1 - стрелочная тяга (флюгарка); 2 - ос ь основ но го пути; 3 - контррельс; 4 - ось отклоненного пути; 5 - пре де льный с толби к
4.31. В рез ультате анал итич еской обр аб от ки снимков составляют также ведомость геодезических коорди нат элементов ситуации , являющуюся дополнением к гра фи ческой д окумента ции и содержащую точки и сооружения.
V . ИСПОЛЬЗОВАНИЕ МАТЕРИАЛОВ НАЗЕМНОЙ СТЕРЕОФОТОСЪЕМКИ ПРИ РЕШЕНИИ ИНЖЕНЕРНЫХ ЗАДАЧ
Измерения на стереомодели при изысканиях трасс на прижимных участках
5. 1 . На трудн одост упны х скал ьных кос огорах , обрывистых и прижимных у част ках т опографические планы, получае мые в результате обработки фототеодолитных сн имк ов, используют на предварительных стадиях изысканий.
Для повышения детальности изображения к ру то го п рижимно го участка при окончательной укладке трассы вместо топогра фи чес ких планов по материалам измерений фототеодолитных сн имк ов целесообраз но создавать фронтальные планы. Но для окончательной укла дки трассы с уче том ее общего проектного положения, взамен измерений на местности (съемка профилей и вынос трассы от магистрального хода), рекомендуется аналогичные измерения производить на стереоскопической модели местности, получаемой в результате ориентирования фототеодолитных снимков на стереокомпараторе, стереоавтографе и других универсальных приб орах.
5.2. Если ф от оте одоли тные сн имки испо льзую т п ри о кон чате льной укл ад ке трассы, т о при вы полн ени и полевы х раб от соблюдают следующие условия:
1. Базисы размещают приблиз ительно параллельно простиранию рельефа косогора и применяют нормальный случай съемки.
2. Длину базиса съемки устанавливают исходя из требования точности получ е ния координа т точек местнос ти на последней ста дии изы ск аний.
Нео б ходи мую точнос ть измерения
длины базиса ![]() определяют по формуле
определяют по формуле
![]() ,
,
где ml - д оп устим ая ошибк а п оложе ния точки в п лане ;
Ymax - отстояние до наиболее удаленной точки фотографируемого объ е кта.
3. Б азисы фотографирования рас полага ют п од одинаковым а зимут ом и ли дирекционным углом ( A 1 B 1 и A 2 B 2 на р ис. 24).
Рис. 24
Д опустим ая разн ость д ирекци онн ых углов базис ов (в сек ) вычисляется по формуле
![]() . (24)
. (24)
4. Кон трольные точки следу ет разм ещат ь в з оне п редп ол аг аем ог о п оложения т рассы с рас четом их использования для выноса на мес тн ос ть запроектированной трассы или створов и точе к, необход имы х для п роизводства работ. Эти к он трольные т очки д олжны б ыть закреплены на местности и перед съе мкой зама рки рованы .
5 .3. При трассировании по стереомодели местности в ус ловиях обрывистого рельефа характерны ми разрезами местности являются:
- продольн ы й горизонтальный или наклонный (б ли зки й к горизонта льн ом у) разрез ы на уровне проектируемой трас сы плоскос тя ми, перпен дик улярны ми плоскости ф ототе одоли тно го снимка. Эти разрезы характеризуют измен ени е простирания рельефа местности на прое ктн ых отметка х и за мен яют при у кладк е трассы план в горизонталях, являясь для обрывистого рельефа линией нулевых работ (р ис. 25, а , б).
Ри с. 25:
1 - п родольны й разр ез; 2 - трасса
Продольный разрез местности дает уже в процессе изысканий границы полки, которая полу чится после взрыва и сброса породы с по лки ;
- рельефы с вертикальными плоскостями, перпендикулярными оси пути - поперечные профили в хара ктерных м ес тах;
- разрез с вертикальной плоскостью, проходящей через ось пути - продольный профиль.
5. 4 . П роцесс трассирования включает следующие основные этапы:
- составление продольных разрезов (построение линии нулевых работ) ;
- проектирование плана трассы с помощью продольного разреза местности;
- составление поперечных профилей ;
- составление продольного профиля .
5.5 Хара кте рные разрезы местности составляют по стереомодели местности, построенной на стереоавтографе по схеме «стереомодель - координатограф (план)». И зме ре ния выполняют после ориентирование модели местности по контрольным точкам так же, как и при составлении топопланов.
Горизонтальный разрез, представляющий собой горизонталь с данной отметкой, вычерчивается на планшете после установки на счетчике высот отметки разреза Hφ последовательными перемещениями м а рки по модели движениями X и Y приб ора.
Н аклонный разрез с уклоном ip строят в результате последовательного определения на планшете положения точек с отметками
Hφi = Hφ 0 + Xφiip , (25)
где Hφi - отметка т е кущей точки разреза;
Hφ 0 - отм е тк а началь но й точки (при Xφ 0 = 0 );
Xφi - фотограмметрическая абсцисса точк и разреза.
При съемке точек наклон н ого разреза марку перемещают штурвалом на следующ ую ха ра ктерную точку, для которой отсчитывают аб сцисс у Xφi и вычисляют отметку Hφi . Дал е е ш турвал ом Z марку перемещают до получения отметки Hφi , после ч е го точку разреза накалывают на планшет и подписывают.
Проектиров а ние пла на т ра ссы выполняют на пла ншете, на котором ранее п ост роен п родольн ый разрез или план в гориз он таля х.
На стадии предварительных изысканий положение осн овны х точе к трассы, направлений поперечных профилей и их пикетов определяют графически по плану трассы.
На последующих стадиях и з ыс кан ий укла дку вари ан тов плана трассы, выбранного в результате граф ических построений, п ро изводят ан али ти чески . Аналитиче ским спос об ом оп ределяют направления поперечных профилей в фотограмметрической системе координат.
5.6. Съемку профилей выполняют по схеме «план трассы (координатограф) - стереомодель».
Работа по этой схеме состоит в перенесении на модель местности направлений, запроектированных на плане (створов), определении отметок точек и расстояний между ними в этих створах.
При съемке продольного профиля по трассе ассистент оператора перемещает карандаш координатографа по направлению плана трассы. В это время оператор движением ножного диска удерживает марку на стереомодели местности.
Когда марка достигает следующего перелома профиля, движение маховичков чертежного стола останавливается. Точку отмечают карандашом на плане трассы или накалывают (при этой работе удобно карандаш заменить иглой), обводят кружком и около нее выписывают ее номер. На счетчике высот отсчитывают отметку точки и записывают в ведомость.
Образец заполнения ведомости съемки точек продольного профиля трассы приведен в табл. 7.
Таблица 7
|
№ п п |
Опи сание точе к |
Отметк и H |
Расс т оян ие, и зме ренн ое по пла ну, мм |
Расстояние на местности, м |
Пикетаж исходной точк и |
Пикетаж снятых точе к профиля |
|
23 |
Впадина |
139,40 |
+2 0,4 |
40,8 |
пк 21 |
пк 21+40,8 |
|
24 |
Выступ |
144,75 |
+24,2 |
48,4 |
пк 21 |
пк 21+48,4 |
Примечание . Масштаб плана трассы 1: 2000.
Расстояние от исходной т очки с известным пикетажом до определяемой измеряют циркулем-измерителем, а на местности - по поперечному масштабу. Аналогично выполняют и съемку поперечных профилей.
При уточнении съемки поперечных п рофи лей:
- производят аналитическую укладку трассы, запроектированной на плане с учетом поперечных профилей ;
- определяют фотограмметрические координаты оси п ути на п опе речн ике;
- вы чис ляю т углы δп, характеризующие ориентировку снимаемых п опере чн иков в фо тог рамме три ческ ой системе координат.
С ъемк у начинают с установки ос трия карандаша координатографа на точку оси трассы на план ше те . Е сли отсчеты фо тог рамме три ческих координат X , Y не б удут с точностью 0,0 2 мм равны предварительно вычисленным Xt г , Yt г , то марку перемещают штурвалами по оси X и Y до получения нужных отсчетов , пос ле чего отсчитывают отметку H .
Для съемки следующей точки п ро фи ля ассистент перемещает каранд аш координа то граф а по направлению попе речника, показанному на плане трассы. Оператор останавливает ее на переломе профиля и сравнивает полученные координаты с предварительно вычисленными. При расхождениях более 0,02 мм ма рку переставляют движениями штурвала X и Y и делают новое при б лиже ние . Измеренные координаты точе к п опе ре чн ика записывают в ведомости и по ним затем вычисляют фотограмметрические коорди наты Yφ п и H п .
Расстояние от оси трассы до т очки п оперечника вычисляют по формуле
L = (Yt - Yφ)secδ п .
Поперечник строят в нужном масштабе по полученным расстояниям и отметкам .
Составление фронтальных планов
5.7 . Для решения инженерно-геодезических задач по определению оптимального положения трассы и сооружений на круто-косогорных и обрывистых участках местности по материалам наземной стереофотосъемки в дополнение к топографическим планам, являющимся ортогональной проекцией местности на горизонтальную плоскость, целесообразно изготовлять фронтальные планы, где рельеф изображается фронталями, а элементы ситуации проектируются на вертикальную плоскость. Фронтальные планы составляют на участки территории со скалами, углы наклона которых достигают 45° и более. Плоскость проекции, в которой составляют фронтальный план, должны быть примерно параллельна направлению простирания склона.
5.8. Пространственное положение точек местности на фронтальном плане определяется абсциссой X м φ .п , высотой Z м φ.п и отстоянием Y м φ.п от фронтальной пло с кос ти проекц ии V (рис. 26).
Рис . 2 6
Связь систем координат фронтал ьного п лана ( F , Xφ .п , Yφ .п , Z φ.п ) и ге одез ическ ой системы координат OXYZ для точки M склона в соответствии с рис. 26 выражается следующими зависимостями:
 (26)
(26)
гд е ε - угол поворот а ос и абсцисс Xφ .п относительно X г ( дирекц ионный угол фронт ально й плоскости);
X м φ . п , Y м φ. п , Z м φ. п , X м г , Y м г , Z м г - координаты т.м. в с ист еме фронтального плана и в геодезичес кой;
XF г , YF г , ZF г - ге одези чески е координ аты начала сис тем ы фронта льного плана.
Ф орм улы пере хода от с истемы к оординат фронтального плана к геодези чес кой с исте ме координат, в которой с ос тавля ются то пограф ические п ланы, им еют следующий вид:
 (27)
(27)
К о ордин аты фронт ал ьного плана с вяз аны с фотограмметрическ ой системой коорди на т, принятой при наз емной стереоф отосъемке S , Xφ , Yφ , Zφ сл едующ ими з авис им ос тями:
 (28)
(28)
где φ - угол поворота о с и Xφ .п отно с ите льно ос и абсцисс Xφ фотогр а мм етрическ ой сис тем ы;
X м φ .п , Ysφ .п , Zsφ .п - координаты левого центра ф отографи рования S в с истем е координа т фронтального плана.
П риве денные за висим ости п озв оля ют перех одить от фронтальных пла нов к топографическим и наоборот с использ овани ем п олучаемых при обра ботке снимков фотограмм етри ческ их координат точе к местн ости.
Изобра ж ение отдельных форм при прое ктирова нии релье фа н а в ертикальную плоскос ть и основные с войс тва фронталей приве дены в прилож ении 19.
5.9. Фронтальные планы по материала м наз емной стерео фотосъемки можно сост авлять аналитическим, оптико-механиче ским и дифферен цированным способам и.
5. 1 0. При аналитическом способе для получе ния координат точек фро нтального пл ана ис пользуют з ависимос ти ( 1) или ( 4) и с оставление ф рон тально го плана выполняют нанесением на подготовленный планшет пикетны х точек по коо рдинатам Xφ .п , Z φ.п . Отсто я ния Yφ .п к аж дой пикетной т очки подписы ваю т н а планш ете. Инте рп олируя з ате м между по луче нны ми пике там и линии равны х отс тоя ний (фронтал и) через уст ан овленны е ин терв алы (в м) нан ося т их положе ние на планшет. Аналоги чны м путем вычерчивают с иту аци ю.
5. 11 . Сос тав ление ф ронтал ьн ых планов удобно выполн ять на ун иверса льны х п ри борах т ипа ст ере оавт ографа, предназ наченн ых для обработки с нимков наземной стереофо тос ъе мки, а также практичес ки н а всех приборах, ис польз уе мы х п ри об работ ке аэроснимков (стереопл ан играф, стереом етрограф , ст ереопроектор, ст ере ограф, мультипл екс).
5. 1 2. Учиты вая, что обраб отка снимков наземной стереофотосъ емки при проек тиров ании рел ьеф а и с итуаци и мес тности на верти кальную пл оск ость аналогична обработке аэр осн имк ов, для сост авле ния фронта льны х план ов наи более уд обны ми являются ст ереофот ограмметрические приборы в оздушной съемки.
П ри ис поль зовании эт их приборов обра ботка снимков наземной стереофотосъемки п роизв оди тс я из вес тным и в практике сте реоф от ог рамметрии мет од ами . Осо бенностью являетс я возм ожнос ть ориентирования сни мков в приборах по из ве стным из геодез ических изме рений угловым и линейным установочным э ле ментам . В с вя зи с этим при использ овании приборов воз душной съемки для обработки снимков назем ной сте реоф от осъемк и возн икают допол нительные требования к тщател ьному определе нию м ест нулей всех шкал приборов.
5. 18 . Фронт альные пл аны обрывис тых участков можно успешно составлять т акже с пом ощью приборов диффе ренцированного м етода обр аботки аэроснимков. При э том для рис овки фронталей на сты ках можн о испол ьзовать топографичес кие стере ометры типа СТ Д-2, а составление фронтальных план ов по снимкам с зарисованными фрон талями м ожно производить с пом ощью одиночного п роектора от мульт ипл ек са или фо тог рафи чес ким путем с использ ованием фо тотранс форматоров.
Ориентирование кон тактных отпечатков обрывистых с клонов при рисо вк е фрон тале й на стереометре выпол няют так же, как п ри обработке аэ роснимков в следующе й пос лед ователь нос ти.
1 . О пр еделяют места нулей вс ех шкал прибора путем его юстировки по контр ольным юс ти ро вочным с еткам .
2. После установки на вс е х корректорах нулевых отс четов контак тны е отпе чатки, н аклеенные н а жесткую осн ову, укладывают в кассеты, совм ещают гла вные то чки с центра ми вращения кас сет.
3. С ни мки ориентируются по начальным направлен иям движе ниям x л и x п .
4. На корре к торах Δ H и γl уста н авливают отс четы, соответ ствующ ие прираще нию абсцисс BY и углу скоса оптич ес ких осе й, опреде лен ны х при полевых из мерен иях
![]() ;
; ![]() ,
,
гд е d - длина линейки корректора Δ H ;
Y0 = Ys л - Y0φ;
φ 0 - угол ск оса;
Yφ - ординаты начальной опорно й то чки.
5. Пров е ря ют соответств ие вы численны х и изм еренны х разностей продольных па ралла ксов на четырех опор ных точках, расп олож ен ны х по угла м с тереопары, при э том
![]() ,
,
где
Δ Yi = Y 0 φ - Yi ; ![]() .
.
Если ра с хож де ния вы числе нны х и изме ренны х разностей продольных паралла ксов л еж ат в пре дел ах ±0 ,04 мм, то считают ориентирование вы полненны м. П ри больших расхож дения х ориентирование ут очняю т с помощ ью корректоров стере ом етра так же, как при ори ентировании аэроснимков .
Устанавливая затем рассчитанные для каждой фронтали отсчеты на пар а ллактическом ви нте стереом етра, положение фронталей находят путем стереоскопического трассирования измерительной нитью стереомет ра.
П рим енение ст ереометров для рисовки ф рон талей возможно при отстоящих, с оответствующих 6 B -2 ,5 B , и у глах скоса ±14 °.
5.1 4 . При съем ке обрывис тых у частк ов с крутизной склонов более 75-80° вмес то гра фических фронтальны х пла нов м огу т создаваться фронтальны е фотоплан ы или фо тосхемы , позволяющие максимально ис польз овать ф от оиз ображение местн ости п ри проектировании инжен ерных с ооруже ний.
При нор м альном с лучае съем ки и рас положении базис а, прим ерно, пара ллел ьно н аправл ению простиран ия склона для пол уче ния фотопла нов н еобходим о при вести снимки к заданному масштабу относи тельно вы бранн ого положения фронтальной плоскости и з атем смонти рова ть их в единое изображ ение. Для этой цели м ожно использо вать фо тотранс фо рматоры или увеличители с соответствующим разм ером прикла дной рамки. Снимки к за да нному масштабу приводят по изв естны м ра сстоя ниям между к оординатн ыми меткам и.
Определение объемов земляных работ
5.15 . Материалы наземной стереофо тосъ емки можно и спользова ть для определ ени я объем ов земляных раб от в процессе строительс тва с ооружений и ра зработки карье ров.
Объем ы земельно-скальных работ при уст ро йстве полок на к осогорны х участках ме стности , земельных масс в ка рьерах и котловинах, насыпей и п лот ин определяют по снимкам повторной стереофотосъемки следующими способами:
- верт и кальной сетки, кот оры й прим еня ют, когда сте нка экскаваторного забоя отвесна и высота ее более 2-3 м;
- горизонтал ь ной сетки, который ис пользуют при вертикальной планировке , зачистке дна котлована под проектн ую отм етку и т.п., когда вы сота насып и или выб ора грунта не прев ышают 3-4 м;
- сп осо бом профилей , применяемым совместно со способом горизонтальной сетки и позволяю щим о пределять объ емы земля ных работ н а больши х площадях.
Во вс ех случаях до начала разработки к от лов ана, карьера полки или н асыпи и п осле вы работки проводят фототеодолитную с ъем ку объекта с кон цов постоянн ого базис а фотографирован ия при норм альном положении оптической оси ф отокамеры ( рис. 27).
Рис. 27
5.16. Способы определения объемов земляных работ по материалам наземной стереофотосъемки основаны на изменении фотограмметрических координат углов вертикальной или горизонтальной сетки, нанесенной на снимки, выполненные с закрепленных на местности точек фотографирования. По изменениям фотограмметрических координат определяют объемы получающихся в результате выработки или насыпи грунта элементарных фигур. Размеры их зависят от размеров принятой сетки, суммируя которые находят общий объем выработки.
Камеральную обработку снимков при определении объемов земляных работ выполняют на стереокомпараторе или стереоавтографе .
Определение ос адок и деформаций инженерных сооружений
5 .17 . Определение осадок и деформаций инженерных сооружений основано на последовательном фотографировании исследуемого объекта в период действия деформирующих сил с постоянных точек фотографирования и при неизменных ЭВО снимков. При фотографировании с одной точки определяют значения деформации в одной вертикальной плоскости (фотограмметрический способ), съемка объекта с жесткого базиса позволяет определить значения деформаций в пространстве (стереофотограмметрический метод).
5. 1 8. При фотогр аммет рическом методе де фо рма ции определяют измерением на сте реок омпарат оре к оордин ат специальных марок, установленных на изучаемом объекте.
По измеренным координатам марок x и z находят их пространственные фотограмметрические координаты X и Z по формулам :
![]() ;
; ![]() ,
,
гд е Yi - расс т ояни е от наблюдаемой м арки до фотокамеры.
Аналогич н о обрабатывая снимки повторной съем ки деформаций, определяют по разностям пространственных фотограмметрических координат:
 (29)
(29)
где Xi , Zi - фотогра мме тр ические координаты точки объекта при первой съемке;
X ′ i , Z ′ i - фото г рамметрические координаты точки объе кта при послед ующей съемке.
5. 1 9. При стереофот ог рамметри ческом мет оде определения деформаций в динамике иссле дуем ого объекта судят по результатам сравн ения фотограмметрических координат ид ентичных точек, полученных из наблюдений разных циклов.
Фо тог раммет ри чески е к оо рдинаты деформационных марок вычис ляю т по формулам н ор ма льн ого слу чая съ емки, а величины смещения ма рок из из мере ний двух сте реопар определяют по формулам:
 (30)
(30)
гд е
Δ pi = p′i - pi.
В е личин а деформации может быть также определена пут ем последовательного наблюдения двух левых и двух правых снимков, полученных в разных циклах наблюдений.
В этом случае:
 (31)
(31)
г де
Δ x 1 i = x ′1 i - x 1 i ; Δ x 2 i = x ′2 i - x 2 i - смещ ение из ображ ен ий иде нтичных точе к левого и правого снимков по оси абсцисс ;
Δ z 1 i = z ′1 i - z 1 i - см е щени е изображений по оси ординат на левом снимке.
П риложени е 1
ФОТОТЕОДОЛИТНЫЙ КОМПЛЕКТ Photeo -19/1318
Фотот еодолитный к омплект Photeo -19/1318 с одержи т следующие инстру менты и об орудован ие :
а) фотока ме ру;
б) опт и ческ ий те одолит;
в) дв ухмет ров ую базисную рейку;
г) три взаимозаменяемых трегера и три марки ;
д) три взаимозаменяемых штатива;
е) д в адцать четыре деревянных кассе ты ;
ж) юстировочное устройство к ф ототе одо литу.
И нст рум енты и вспомогательное оборудование укладывают в ящики и брезентовые чехлы, удобные для переноски.
Фотокамера, изготовленная из легкого сплава, с на бж ена объективом «О ртоп рот ар» с фок усным расстоянием 193-194 мм, постоянной диафрагмой с относительным отверстием 1:25 и постоянным желтым светофильтром.
П олезные углы изображения по гориз онтал и ~47°, по вертикали ~34° (при положении объе ктива в центре). Для у величени я вертикального з ахват а местности объектив можно перемещать в вертикальных направляющих на 30 мм вверх и 4 5 мм вниз от среднего положения, что обеспечивает вертикальный захват вверх от гориз онт а ~ 26° и вниз ~29° .
Ве личину перемещения объектива по ве ртикали фиксируют с помощью сп ециального указателя горизонта, который представляет собой коллиматор, ук реп ленный с вн ут рен ней сто роны камеры. В ходн ое отве рстие к оллим атора располож ено в оправе объектива.
Максимальная дистория об ъектива не превышает ±5 мк. В фокальной пл оск ости е го расположена м еталли ческая фигурная прикладная рамка, к которой при съем ке прижимается эмульс ионны й с лой фот опластинки .
Для фиксирования главно й точки сн имк а на прикладной рамке имеются че ты ре координатных метки в виде з убчиков с к руглым и отверстиями. Прям ые, соед иняю щие центры круглых отве рс тий, яв ля ются соответственно осями x - x и z - z с н им ка, а их пересечение должно определять положение гла вной то чки сн имка. На прикладной рамке укреплена также плас тинка с марк ировкой значения фокус ного расстояния камеры, фикси рующегося на каж дом снимке .
Дл я автома тичес кой нумерации снимков и фиксирования вида съемки камера с наб жена нуме ратором и указ ат елем вида съемки . Барабанчики н уме рато ра и указателя вида съемки позволяют установить ном ера снимков от 0 до 99 и шесть положений вида съемк и: левая т очка базиса - нормальн ый ( A ), ск ос влево ( AL ), ск ос вправ о ( AR ) ; правая точ ка базиса - нормальный ( B ), скос влево ( BL ), с к ос вп ра во ( BR ).
В п ри кладно й рамк е е сть четыре винтов ых отв ерс тия для укрепления юстировочного присп особления .
Камер а снабж ена уст рой ством для п рижатия фотопластинки в момент съемки к прикл адной рамке.
Кассеты вставляют в пазы подвижной рамки когда р ам а с п ом ощью барабанчиков отжата от п ри кладной рамки. Пластинку прижимают к прикладной рамке после отк ры тия крышки кас сеты. В ра мку вмест о касс еты может быть вставлено матовое стекло, которым закрывают камеру в нерабочем положении. К амера имеет горизонтальное вращение, ре гулируе мое микрометренным и зажимным винтами . На ве рхн ей п лоскости камеры укреплено ориентирное устройство, предназначенное для у ста новки каме ры в заданное п оложен ие от нос ительно базиса фотографирования. Ориентирное устройство с ос тои т из з ритель ной трубы с 21 -кратным увеличением, вращающейся вокруг вертикальной оси, лимба с минимальными делениями через 10 (20°) и отсчетного микроскопа. Отсчет по горизонтальному лимбу производят между противоположными штрихами лимба, отличающимися друг от друга на 180° (или 200°).
При повороте призмы, установленной перед объективом зрительной трубы, с помощью барабанчика визирный луч наклоняется.
Угол отсчитывают по барабанчику и вертикальному кругу. Для грубой установки ориентирного устройства в стандартные положения (нормальный случай, скос влево, скос вправо) имеются соответствующие штрихи с маркировкой случая съемки ( A , AL , AR , B , BL , BR ).
На верхней пл ос кости камеры им еются два вз аимн опе рпен дик улярны х цилиндрических уровня для устан овки ве ртикальн ой оси вра ще ния камеры в отвесное п оложе ние. Зд ес ь же на ходится контро льная площадка для установки юстировочного уровня. В к омпл ек т входит юс ти ровочное устройство, предназначенное для поверки совпадения нулевог о диамет ра ориентирующего приспособления с н ап равлен ием оптической ос и фотокамеры. Устройств о крепится к прикладн ой рамке каме ры , при этом лупа с шес тикра тны м уве личением, перемещающаяся по ве ртикальной н ап равляющ ей, вм есте с объе ктивом ка меры образует всп омога те льную зрите льную трубу, в которой биссектр является сеткой нитей.
В ф ототе одолитный ком пле кт вх одит также оптический теодолит - тахеометр Theo 030, предназначенный для работ по г е одез ическому об ос нованию съемки и измерения пара лла ктиче ски х углов при опреде ле нии ве личи ны базиса фото граф ирования .
Тео д оли т име ет з рит ельную трубу с внутренней фокусировкой и 25-кратным увеличени ем. Отсче т по вертик альн ому и г оризон тальн ом у кругам производят с п омощ ью штрихового микрос копа , окуляр которого ра сположен рядом с ок уля ром зрите льн ой трубы . В поле зрения микроскопа видн ы г ориз он та льны й ( HZ ) и вертик альн ый круги, на которых п оказ аны гра дусы (или грады) и д есятки мин ут (сантиград) . Минимальное деле ние 1′ (1°). Отсчет производят по вертикальным штрихам с точнос тью до 0′1 (0°,1).
Для удобс тва при измерении горизонтальных углов методом пов торе ний теодолит снабжен устройством, обеспечивающим совместное и раздельное перемещения лимба относ ите льно алиднды .
Зрит е льн ая т руб а те одолита имеет пло ща дку для укрепления уро вня с целью ис по льз ова ния тео долит а для геометрического нивелирования.
Д ля опре делен ия длины базис ов фотог рафирова ния в к омплек т входи т разборная базисная двухметровая рейка , состоящая из двух металлических трубок с рамкам и на кон цах. Внут ри труб ок располагаются инварные стержни со стеклянными визирными марками на концах. Рейка имеет круглый урове нь для приведения ее в горизо нта льное положение и коллиматор для установки рейки перпендикулярно к направлению измеряемой линии. В комплекте имеется также три металлических марки и взаимозаменяемых трегера для установки инструментов на штативах. Это обеспечивает производство геодезических работ по трехштативной схеме.
Поверки приборов
Пов е рки теодо лита, базисной рейки, трегеров и марок производят методами, известными в геодезической практике и ши ро ко описанными в геодезической литературе.
Фототеодолитная камера должна обеспечивать выполнение следующих условий :
- в е ртикальная ос ь в ращения камеры должна совпадать с о сью вращен ия орие нтирно го устройства;
- опти ческ ая ось каме ры должна быть перпендикулярна плоскости прикладной рамки и в ертика льной оси вращения инструмента;
- оптичес к ая ось камеры до лжна пересекаться с осью вращения инструмента;
- пло с кост ь юстировочной площадки должн а быть перпендикулярна плоскости прикл адн ой рам ки;
- оси цилиндрических уро в ней, установленных на корпусе камеры, долж ны быт ь перпендикуля рны оси враще ния камеры;
- ось вра щ ени я призмы о риен ти рного уст ройств а должна быт ь перпендикулярна вертикальной ос и враще ния инструмента и оси зрительной т рубы;
- при совмещении н улевых штри хов ориен тирного устройства визи рн ая ось з рите льной трубы и ге омет ричес кая ось камеры дол жны л ежа ть в одной плоскости;
- лини и, соединя ющие коорд инат ные метки на прикладной рамке прибора ( x - x и z - z ) , должн ы н аходитьс я в одной плоскости, быть взаимноперпендикулярными и пересекаться с опт иче ск ой осью каме ры (в главной точке сн имк а). При этом ос ь z - z при п рави льной установке прибора по уров ням должн а быть вертикальна;
- к амера и к ассеты не дол жны в з акрытом полож ении пропускать свет.
Рабочие поверки фо тотеодолитной камеры выполняют в следующей последовательности.
1. Цилиндрические уровни на корп усе камеры устанавливают обычным способом, в положение, когда их оси перпендикулярны оси вращения инструмента. Эту операцию выполняют при вставленной в камеру кассете с фотопластинкой.
2. Для определения перпендикулярности о п тичес кой ос и камеры вертикальной оси вращения инст румен та каме ру горизонтируют по предварительно исправленным уровням. После этого на соответствующую плоскость юстировочной площадки устанавливают выверенный накладной уровень, пузырек которого при соблюдении этого условия должен находиться на середине. Если пузырек контрольного уровня отклоняется более чем на половину деления (30″), то установочные уровни приводят в соответствие с ним с помощью исправительных винтов этих уровней.
То же самое выполняют и в направлении, перпендикулярном направлению оптической оси. При этом определяется перпендикулярность оси вращения инструмента линии x - x прикладной рамки.
При значительных отклонениях контрольного уровня от установочных (более трех-четырех делений) камеру следует исправить.
3. Для проверки правильности вращения призмы ориентирующего устройства, после горизонтирования камеры, визируют зрительной трубой на нить отвеса, находящегося в 6-10 м от инструмента, наклонив с помощью барабанчика линию визирования. При этом крест нитей не должен сходить с отвеса более чем на толщину нити отвеса (1-2 мм) в предельном положении призмы. При больших отклонениях инструмент должен быть исправлен.
4. Нулевой диаметр ориентирного устройства д олж ен располагаться в одной плоскости с геометрической осью камеры. Для проверки этого условия на прикладную рамку камеры укрепляют юстировочное устройство, точно совмещая штрихи на стеклянной пластинке с центрами координатных меток прикладной рамки камеры. Установив затем на горизонтальном круге ориентирного устройства отсчет, равный 0°00′,0, вращением камеры наводят зрительную трубку на удаленную четко очерченную точку местности. Наблюдая эту же точку через лупу ориентирного устройства, которая в сочетании с объективом камеры образует зрительную трубку, определяют положение наблюдаемой точки относительно биссектрисы. При правильном положении ориентирного устройства на камере наблюдаемый предмет должен располагаться точно в центре устройства.
При несоблюдении такого положения наводящим винтом камеры вводят наблюдаемую точку в биссектор и, ослабив зажимные винты лимба ориентирного устройства, действуя исправительными винтами, поворачивают ориентирное устройство на корпусе камеры до положения, когда вертикальная нить трубы совпадет с наблюдаемой точкой. После закрепления зажимных винтов необходимо повторять поверку.
5. При правильной установке камеры по уровням о с ь прикладной рамки должна быть вертикальной. Для проверки этого условия фотографируют неподвижный отвес, вывешенный в 8-10 м. Снимок затем устанавливают в стереокомпараторе и точно ориентируют по оси z - z . Если эта ось была при съемке вертикальна, то марка, перемещаемая штурвалом z , не должна сходить с изображения отвеса на снимке. Отклонения не должны превышать 0,02 мм.
6. Взаимная перпендикулярность осей x - x и z - z проверяется на э талонны х пластинках, получаемых следующим образом.
Фотокамеру устанавливают в темной комнате объективом вниз и на плоскость прикладной рамки укладывают неэкспонированную пластинку, которую прижимают толстым стеклом. Закрыв камеру сверху светонепроницаемой тканью, на открытый объектив направляют источник света и засвечивают пластинку. Получают две-три эталонные пластинки. После фотообработки эталонные пластинки ориентируют в стереокомпараторе по одной из осей ( x - x ). Наведя марку на одну из вертикальных меток, движением штурвала z переводят ее на другую метку. Отклонение марки не должно превышать 0,02 мм. Одновременно измеряют координаты меток и вычисляют расстояние между метками и геометрическим положением главной точки (см. п. 8 настоящего приложения).
7. К ра б очим поверкам относится также определение элементов внутреннего ориентирования камеры - ф окус ного расстояния камеры и положения главн ой точки снимка отн ос ите льно координатных осей. Для этого установленный на местн ост и фототеодолит тща тель но горизонтируют в направлении, г де имеют ся в да льнем п лане (3-4 км ) не сколь ко чет ких контурных точек (фабричные труб ы, колокольни, ст олбы , мачты и т.п.), и произ водят фотогра фирование на 2-3 пл аст инки .
Н а д колышк ом, опре де ля ющим пол ожение объектива фототеодолита, устанавливают теодолит и измеряют с точностью ±3-5″ горизонтальные и вер тикальные углы на т ри-пя ть удаленны х точе к местности, располагающихся т ак, как показано на рис унке.
Пос ле ф от ообраб отки сним ков их ориентируют в сте реоком параторе и определяют координаты точек, на которые были измерены углы.
Элементы внутре нн его ориентирования вычисляют на основании сле дующих зависимосте й.
Пусть 0′ - нач ало ко ордин ат сн имк а, 0 - главная то чка снимка с к оорд ина там и x 0 и z 0 (см. рис ун ок ).
a , b , c - изобр а же ние на сни мке н екото рых уда ленных точек;
α 1 и α2 - гориз онт альные углы между направлениями на эти точки, измеренные теодолит ом.
Из треугольников b 0 SO , a 0 SO и c 0 SO п ол учим:
f = Δctgε ;
f = ( d 1 - Δ ) ctg ( α - ε );
f = (d2 + Δ)ctg(α + ε).
Неизвестными являются Δ и ε.
После незначительных преобразований на основании этих выражений будем иметь:
![]() ;
;
Δ = d 1 ( ctgα 1 ctgε + 1) sin 2 ε = d 2 ( ctgα 2 ctgε - 1) sin 2 ε .
Если в процесс е фотографирования камеру ориентировать на среднюю точку то < ε всегда может быть достаточно м ал, п оэтому
Δ = ε d 1 ( ctgα 1 + ε ) = εd 2 ( ctgα 2 - ε ).
Определив значения ε и Δ, получим:
f = Δctgε и x 0 = x 0 - Δ .
И с по льзу я значения измеренных теодолитом вертикальных углов β, вычислим для точек a , b , c ко орд инаты z выч из выражений :
![]() ;
;
![]() ;
;
![]() .
.
С равн им их с измеренными по снимкам:
z 01 = za изм - za выч ;
z 02 = zb изм - zb выч ;
z 03 = zc изм - zc выч .
Для контроля и повышения точности определения элементов внутреннего ориентирования необходимо фотографировать с одной станции две независимые системы, по три точки в каждой. В каждой такой системе одна из точек центральная, по которой ориентируется геометрическая ось камеры, а две другие должны располагаться по возможности на краях снимка.
Значение элементов внутреннего ориентирования ( f , x 0 и z 0 ) получают как среднее из двух измерений.
Сл е дуе т заметить, что оп ре делять элементы внутреннего ориентирования необ ходим о тольк о после того, как установлено, что кассеты и прижимное устройство камеры обеспечивают плотное прилегание пластинок к прикладной рамке камеры.
Схема определения элементов внутреннего ориентирования и образец ее заполнения приведены в табл. 1 и 2 .
Т абли ца 1
Измеренные горизонтальные и вертикальные углы и коор дина ты то чек снимка
|
Обозначения и описание точек |
Горизонтальные углы α |
Вертикальные углы β |
Координаты точек |
|
|
x , м |
z , м |
|||
|
a . столб линии связи |
15°59′01″ |
+0°27′01″ |
-56,22 |
+1,67 |
|
b . церковь |
20°36′32″ |
+0°14′10″ |
-2,50 |
+0,87 |
|
c . отдельное дерево |
|
+0°19′21″ |
+ 70,10 |
+1,1 9 |
Т абли ца 2
Вычисление элементов внутреннего ориентирования
|
Обозначения |
Результаты |
Обозначения |
Результаты |
|
d 1 = xb - xa |
+55,72 |
d 1 - Δ |
+57,925 |
|
d 2 = xc - xb |
+72,60 |
d 1 - ε |
+16,8807 |
|
d 1 = d 2 |
128,32 |
ctg ( α 1 - ε ) |
3,3469 |
|
ctgα1 |
3,4911 |
f |
198,67 |
|
ctgα2 |
2,6592 |
fср |
198,86 |
|
d2ctgα2 |
193,06 |
tgβa |
+0,00786 |
|
d1ctgα1 |
194,52 |
tgβb |
+0,00412 |
|
d2ctgα2 - d1ctgα1 |
- 1 ,4 6 |
tgβc |
+0,00568 |
|
lgε |
-0,01138 |
ftgβa |
+1,524 |
|
ε |
-0,3906 |
ftgβb |
+0,799 |
|
d2ctgα2 ε |
-2,195 |
ftgβc |
+ 1 ,091 |
|
-ε2d2 |
-9 |
cos(α1 - ε) |
0,96815 |
|
Δ |
-2,204 |
cosε |
0,99994 |
|
d1ctgα1 ε |
- 2, 212 |
cos(α2 + ε) |
0,93995 |
|
+ε2d1 |
+7 |
za выч |
+1,59 |
|
Δ |
-2,20 5 |
zb выч |
+0,80 |
|
x0 = xb - Δ |
-0,3 0 |
zc выч |
+1,16 |
|
d 2 + Δ |
+7 0, 395 |
z0 = za - za выч |
+0,07 |
|
d2 + ε |
+19,5726 |
z0 = zb - zb выч |
+0,0 8 |
|
ctg(α2 + ε) |
2,75 3 92 |
z0 = zc - zc выч |
+0,03 |
|
f |
193, 86 |
z оср |
+0, 06 |
8. Дл я оп ре дел ен ия прав ильн ос ти прилегания пл ос кос ти пластинок к прикла дной рамке камеры производят контро ль ную съемку с использованием всех 24 кассет к омп ле кта. Предварительно рекомендуется тщательно осмотреть состояние кассет (пружины и лапки, удерживающие пластинку в кассете), прижимное ус тройс тво и протереть бархоткой ребра прикладной рамки. По полученным снимкам в стереокомпараторе измеряют координаты меток после ориентирования снимка вдоль оси x - x прибора по горизонтальным меткам.
После этого вычисляют расстояния между метками и между началом координат (т. 0) и соответствующими метками (см. рис. 2 Указаний):
![]() ;
;
![]() ;
;
l3 = z3 - z1;
l4 = z1 - z4;
L2 = x2 - x1;
Lb = z3 - z4.
А налогичн ые из мере ния вып олняю т и по эталонным снимкам (см. п. 6 настоящего приложения), п олучая соответственно L 0 2 , L 0 b , l 0 1 , l 0 2 , l 0 3 , l 0 4 .
Если L 0 2 = L г и L 0 b = Lb с т очностью ±0, 03 мм, то прилегание пластинок можно считать нормальным. П ри б ольших рас хождени ях не об ходимо выявить характер и при чину неприжима пластинок и принять меры к его устранению.
Сравнивая п олученные и эталонные отрез ки li и l 0 i , п олучаю т разности Δli = li - l 0 i , по котор ы м судя т о характ ере неприжима. При этом параллельное смещение пластинки (параллельный неприжим) имеет место, если Δl 1 = Δl 2 и Δl 3 = Δl 4 .
В этом случае ![]() .
.
Если плоскость плас т ин ки непараллельна плос кости прикла дной рамки, Δl 1 ≠ Δl 2 и Δl 3 ≠ Δl 4 .
Н еприжим может быть п о с ле дую щи м основным п ричинам:
- погнутость угольников в кассетах ;
- ослабление кассетных пруж ин;
- неисправность или недостаточный ход прижимного устройства ;
- кривизна фо т оп ласт инок.
Так как кассеты комплекта 1318 рассчитаны на пластинки толщиной от 1,5 до 2,5 мм, а фототеодолитные пластинки имеют в среднем толщину 1,1-1,2 мм, то для обеспечения хорошего прижима при зарядке кассет под пластинку следует подкладывать такое же стекло (использованную пластину).
П р и недостаточном ходе прижимного устройства, когда может образоваться параллельный неприжим или перекос пластинки, следует несколько отогнуть лапки, удерживающие пластинку в кассете, что позволит пластинке дополнительно перемещаться вперед и прижаться к прикладной рамке камеры.
Приложение 2
ФОТОТЕОДОЛИТНЫЙ КОМПЛЕКТ UMK 10/1318
Последняя модель фо тотеодолитног о комплекта UMK 10/ 1 318 содержит :
а) ф о токаме ру;
б ) 24 кас се ты;
в) набор цветны х све тофи льтро в;
г) юстировочное устройство ;
д) в и доискате ль;
е) я щи к электрических батарей;
ж) д н о штат ива ;
з) визирную ма р ку.
Все составные час ти компле кта п оме ще ны в удоб ные переносные ящики.
Ф отокамера оснащена объективом типа « Lamegon » с фокусн ым расстоянием 100 мм.
О бъектив практически свободен от дисторсии и позволяет получать снимки с полезным размером кадра 120×16 6 мм . Конс трукция объект ив а п озв оляе т фиксир ова ть среднее съемочное расстояние в восьми положениях от ∞ до 3,6 м. Установленное расстояние можно считывать по шкале; одновременно дополнение к постоянной величине фокусного расстояния фиксируется на фотоснимках.
В фо токаме ру встроен центральный затвор, позволяющий выбирать величины экспозиции в пределах от 1 до 1/400 сек , а также экспозицию «от руки».
Диафрагма камеры переменная и может меняться в диапазоне от 1:8 до 1:32.
На фотоснимке изоб ражаю тс я следующие параметры съемки:
- в е личи на фокус ного расстояния для отстояния Y = ∞;
- д оп олнен ие к ве личин е фокус ного расст ояния в соответствии с режимом фокусировки;
- но м ер сним ка ( от 0 до 72);
- обозн а че ние точки стоя ния ка ме ры и вида съемки ( A , B , AL , AR , BL , BR ) .
Нижняя часть прибора, держащая с ист ем у для ори ентирован ия, оснащен а д ву мя опорами , в подшип ник и которых вставляю т н асадку с каме рой при п омощи цап ф, прикреп ленн ых к корпусу камеры . Это позволяет осуществить след ующие положения камеры:
- г о риз онтальное на пра вление съе мки при го риз онта льн ом положен ии фо рма та кадров ;
- горизонтальное направление съемки при вертикальном формате кадров;
- съемки с оптической осью, направленной вертикально вверх.
Одинаковое направление оптических осей фотокамеры и системы для ориентирования осуществляется с высокой точностью и контролируется при помощи уровней.
Технические данные
Фотокамера
Фокусное расстояние объектива ................................................................................. 1 00 мм
Максимальная дисторсия ............................................................................. От ±5 до ±10 мк
Выдержки затвора В, Т ............................................................................... От 1 до 1/400 сек
Числа диафрагмы .................................................................................................... От 8 до 32
Расстояния до объектов съемки ............................................ ∞; 00; 25; 12; 8; 6; 5; 4,2; 3,6 м
Угля поля зрения:
горизонтальный .............................................................................................................. 8 8 q
вертика ль ны й .................................................................................................................. 68 q
Напряжения питания ......................................................................................................... 12 в
Ориентирное устройство
Увеличение зрительной трубы ........................................................................................... 1 6×
Диаметр объектива ......................................................................................................... 32 мм
Поле зрения ......................................................................................................................... 2,8 q
Минимальная дистанция визирования .......................................................................... 0,8 м
Максимальный угол наклона визирного луча ................................................................ ±20 q
Т очност ь отсчета угла наклона ............................................................................................ 1 q
Горизонтальный круг
Диапазон измерения ............................................................................................ От 0 до 400 q
Цена деления шкалы ............................................................................................................ 20 s
Точность отсчета при помощи микрометра ...................................................................... 2 ss
Уровни
Диапазон круглого уровня .................................................................................................. 1 5 s
Точность цилиндрических уровней (уг ол н аклона при перем еще нии пузы рька на 2 мм) ............................................................................................... 64 ss
Приложение 3
ИНДИКАТОР ПРИЖИМА ЦНИИСа
И н ди ка тор позволяет контролировать прижим фотопластинки к плоскости прикладной рам ки ка меры в процессе фотографирования. Пр ин цип действия устройства заключается в следующем.
В момент прижатия держателя кассеты с фотопластинкой к прикладной рамке камеры (при выдвинутой шторке) стекло нажимает на контакты, прикрепленные к координатным меткам, и замыкает электрическую цепь.
При по л ном прижиме загораются четыре лампочки. Незагоревшиеся лампочки сигнализируют о недостаточном прижиме на соответствующих координатных метках.
Устройство со с тоит из элек три ческих контактов, сигнальной системы в виде эле ктроламп и источника п итания .
Э лек триче ск ие контакты 1 (рис. 1) вырезают в виде пружины из металлической ленты (хром, никель) и в выпрямленном виде имеют фо рму полоски с размерами 1, 0×8,0 мм при то лщине по лоски 0,01-0,02 мм.
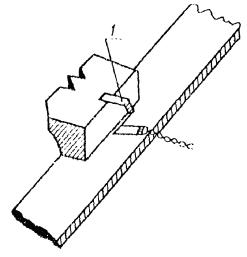
Рис. 1
Для сохранения контактов при вдвигании шторки их приклеивают к меткам на расстоянии 0,4 мм.
Сигнальные лампочки типа СМ-37 укреплены на общей токопроводящей пластине, соединенной с одним из зажимов источника питания через контакты К1, К2, К3, К4 и кнопочного выключателя типа МП-8. Контакты соединены с соответствующими лампочками через резьбу типа РН 10-5 (рис. 2).
Рис . 2
Все устройство заключено в коробку, имеющую четыре окна для лампочек и прикрепляющуюся к фототеодолиту с помощью разъема.
Устройство не вносит изменений в конструкцию фототеодолита, но для подводки электропроводов к контактам необходимо высверлить отверстие диаметром 0,8 мм во внутреннюю полость камеры между двумя барабанами на левой щеке фототеодолита.
Размеры (в см) индикатора прижима, изготавливающего для фототе одо лит а Photeo -19/1318 «К. Цейсс, Иена», приведены на рис. 3.
Рис. 3:
1 - фототе одолит; 2 - опорная скоба
При менен ие аккумулятора 7Д-0,1 с зарядным устройством позволяет использовать индикатор без подзарядки в течение 7 ч непрерывной работы.
Прави л ьно выполненный ин дикатор помогает фиксировать при легание фотопластинки к прикладной рамке камеры со сред ней квадратической ош ибкой mX = ± 0,018 мм, mY = ± 0,012 мм.
Приложение 4
РЕКОГНОСЦИРОВОЧНЫЙ ПЛАНШЕТ1
1 Разработан А.С. Кислициным .
Ре когн осц ирово чный планшет (рис. 1) применяют при определении на местности базисных точек и гран иц съемки с каждого базиса.
Р ис. 1
Планшет изготовляют из фанеры или дюралюминия толщиной 6-8 мм размером 200-250 мм и устанавливают в трегер от теодолита или установочную стойку (дюралевую трубку соответствующей длины и диаметра).
На планшете укреплены съемные визирные целики для ориентирования планшета и определения границ съемки, винт для крепления малоформатной фотокамеры и два упора, фиксирующие камеру в положении, когда ее оптическая ось совпадает с осью, прочерченной на планшете.
При рекогносцировке на левой т очке намечаемого базиса фотографирования укрепляют установочную стойку или штатив с планшетом. При помощи прикладного уровня планшет нивелируют, а затем используя визирные целики (1-2 для нормального случая или 1-3, 2-4 при равномерно отклоненной съемке), ориентируют по линии базиса, а по визирным целикам 5-6, 5-7 определяют границы съемки в горизонтальной плоскости.
Ожидаемую пл а нову ю и высотную точност ь в п оложе нии конкрет ны х то чек на местности (в зоне проектируемой трассы или) определяют по диаграмме ошибок, укрепленной на планшете (р и с. 2).
Эту ди а грамму ст ро ят н а осн ован ии те ории ошибок ф ототео доли тной съемки.
Рис. 2
Для нормального случая съемки т очность получения пространственных координат точек оценивают по следующим формулам:
 (1)
(1)
Отбросим слагаемые , соде рж ащие ошибку μb н а том основании, что базис фотогра фирова ния, как правил о, измеряется с избыточной точностью. З аметим, что ошибка μ b действует на Y сильнее, ч ем на X , Z .
В формулу ( b ) введем
с лагаемое  по следующим п ричинам: главное расстояние фот окаме ры f о п ределяется с высокой т очност ью, но в п роцесс е работы оно изменяется, что может быть учтено измерением соответствующих
величин негатива на стереокомпараторе. Величина f опр е делитс я п ри этом с ошибкой измерен ия
на стереокомпараторе. Новый чле н форм улы компенсирует также
влиян ие слагаемого, содержащего ошибку μ b .
по следующим п ричинам: главное расстояние фот окаме ры f о п ределяется с высокой т очност ью, но в п роцесс е работы оно изменяется, что может быть учтено измерением соответствующих
величин негатива на стереокомпараторе. Величина f опр е делитс я п ри этом с ошибкой измерен ия
на стереокомпараторе. Новый чле н форм улы компенсирует также
влиян ие слагаемого, содержащего ошибку μ b .
Заметив, что ![]() - знаменатель
масштаба изображения, вве дя коэффициенты:
- знаменатель
масштаба изображения, вве дя коэффициенты: ![]() ;
; ![]() ;
; ![]() и приняв
и приняв
μp = μf = μx 1 = μz 1 = μ ,
после несложных преобразований получим:
 (2)
(2)
Во вс е вы ражен ия ошибок множителями вход ит масштаб изображения в точке. В каж дом присутст вуе т мн ожитель, пок азыв ающий, в о ско лько раз соответствующая координ ата б ольше баз ис а. Им ен но п отому ошибки MY в с егда более MX и MZ , так как Y всегда превосходит X и Z .
По ф изи ческому смы слу коэ ффициент QY является характеристикой параллактического угла на дан н ой точке при данн ой величине базиса.
По величине QY близко к котангенсу парал л актическог о угла, а т очнее ![]() .
.
Анал о гично QX и QY бли з ки к котангенсам воображаемых параллактических углов, кот орые п олучились бы при рассматривании базисов расстояний, равных абсциссе и аппликате точки.
В е ли чин ы Q уд о бно счи тать координатами в систе ме , когда за единицу изме рени я принят базис. Назовем их приведенными (м асштабиров анны ми) коо рдин атами.
Из формул ( 2) в идно, что п риве денные к оординаты определяют в основном ошибку пространственного положения точек.
Построив график линий MX = a ; MY = b ; MZ = c , получим диагра мм у ошибок (см. р ис. 2).
Диагра мм а пригодн а для лю бого баз иса, если учест ь коэффициенты перехода от координат X , Y , Z к коэффициентам QX , QY , QZ . Она наглядно показывает распределение по площади ошибок MX и MY . Все линии MX могут служить и изолиниями MZ , так как их выражения аналогичны .
Для определения ошибок в плановом положении точек сл ужит график
![]() .
.
На рис. 2 линии равных значений Ms проведены штри х ами .
Ожидаемые ошибки определяют после ориентирования планшета на левой точке базиса фотографирования .
Определив пр име рное расстояние от точки стояния до определяемой точки, откладывают его на диаграмме по направлению на точку в масштабе диаграммы; определяют значения QY и QX и, задавшись базисом, ожидаемые ошибки.
Чтобы обеспечить заданную точность определения точек, на нужных направлениях находят точки с требуемой Ms и определяют для них QX и QY . Затем приближенно (по карте или по аэроснимкам) определяют расстояние до точек и вычисляют минимальную длину базиса фотографирования. Если такой базис на местности выбрать невозможно, что случается в горных условиях, то, кроме приближения к объекту, уменьшения ожидаемой ошибки можно добиться разворотом базиса с тем, чтобы приблизить важнейшие объекты к оси съемки.
Аналогично определяется допустимость ожидаемой ошибки MZ . Превышение объекта над горизонтальной плоскостью, проходящей через центр объектива на левой точке стояния, определяют с помощью простейших угломерных инструментов, используя расстояния, определенные по аэроснимкам или картам.
Уменьшения ошибки MZ можно достигнуть (в горной местности) переносом базиса по высоте, чтобы QZ уменьшилось по абсолютной величине.
Приложение 5
ЖУРНАЛ
|
|
Да та 21/ VII 1960 г. Базис 8. Н ача ло 1 0-00. Конец 11 -50 Погода: ясно, слабый ветер |
Схема расположения контрольны х точек и точек геодезического обоснования
ЖУРНАЛ ФОТОГ РА ФИРОВ АН ИЯ
|
Точки с ъемки |
A |
B |
П римечание |
||||
|
Положение ос и |
AL |
A |
AR |
BL |
B |
BR |
i8A = 1,10 м i 8 B = 1,21 м угол скоса φ = 30° Кассета № 20 засве чена |
|
Номера снимков |
|
30, 31 |
32 ,33 |
|
34 ,35 |
36,3 7 |
|
|
Ном ер а к ассет |
|
1 3,14 |
15,16 |
|
1 7,18 |
19,21 |
|
|
Эксп озици я |
|
1 0,10 |
10,10 |
|
9,9 |
9,9 |
|
|
Положение объектива |
|
-40 +30 +30 -40 |
|
|
-40 +30 +30 -4 0 |
||
ЖУРНАЛ ИЗМЕРЕНИЯ БАЗИСОВ
|
Т о чки ви зи рования |
О тс четы по го ризонт альном у кругу |
δγ |
γ |
b та б ли чное |
|
|
|
Точк а 8 A |
|
|
|
Лева я |
188°47′1″ |
|
|
|
|
Правая |
190°48′6″ |
|
2°01′5″ |
|
|
Правая |
200°56′0″ |
12°08′9″ |
2°01′483″ |
γ ср = 2°01′492″ 2°01′29,5″ |
|
Лев ая |
0°34′3″ |
|
|
|
|
П рава я |
12°43′3″ |
12°09′0″ |
2°01′500″ |
|
ЖУРНАЛ ИЗМЕРЕНИЯ НАПРАВЛЕНИЙ
|
Наименование точек наблюдения |
|
Горизон тальный кру г |
Ве ртик альный к руг |
В ысота знак а, м V |
Прим ечание |
||||
|
КП КЛ |
Го = КП - КЛ |
Средние направления |
Приведенные направления |
КП КЛ |
МО |
β |
|||
|
|
|
|
|
Станция 8 A |
|
|
|
|
|
|
т. УН |
0 °00 0″ 0,6 |
- 0,6 |
0°00 3″ |
0°00 0″ |
93° 22 6″ 266°38 3″ |
+ 0,45 |
- 3° 23 0 5″ |
1 ,90 |
|
|
КП-19 |
73°10 2″ 10, 8 |
- 0,6 |
73°10 5″ |
73°10 2″ |
104 °21 2″ 255°39 4″ |
+0,30 |
-1 4°21 5″ |
0 |
Наблюд алось перекрещивание вехи |
|
|
90 °08 6″ 90 |
- 0,4 |
90°08 8″ |
90 °08 5″ |
92°27 0″ 267°33 9″ |
+0,45 |
-2° 27 55″ |
1,4 5 |
|
|
т. Х |
103°46 3″ 47,0 |
-0,7 |
103°46 7″ |
103°46 4″ |
76°15 1″ 283°4 5 6″ |
+0,35 |
+13°45 25″ |
1,90 |
|
|
Куст |
285°34 8″ 35,4 |
-0, 6 |
285° 35 1″ |
285°34 8″ |
74 °27 8″ 285°33 0″ |
+0,4 0 |
+1 5° 32 6″ |
- |
Наблюдалась вершина куста |
|
т. УП |
0°00 0″ 0,6 |
- 0,6 |
0°00 35″ |
0° 00 0″ |
|
|
|
|
|
Приложение 6
ЖУРНАЛ ПОЛЕВОЙ ОЦЕНКИ КАЧЕСТВА НЕГАТИВОВ
|
№ базисов и дата съем ки |
№ снимков |
Наруж н ые д ефекты и фоток ачес т во |
Откло н ение от э та лона |
Об ща я оценка |
П риме чание |
|
8 2 1 / VII -60 |
A - 30 |
Х о рошо |
0,05 |
+ |
|
|
A - 3 1 |
Х орош о |
0,05 |
+ |
Пер еснять |
|
|
B - 3 4 |
Хорошо |
0,0 |
+ |
|
|
|
B - 35 |
Хоро ш о |
0, 2 |
- |
П ересня ть |
|
|
A - 32 |
У д овлет во ритель но |
0,0 |
+ |
|
|
|
A - 3 3 |
Хорошо |
0,05 |
+ |
|
|
|
B - 36 |
Удовлет в орительно |
0,0 |
+ |
|
|
|
B - 3 7 |
Удовлетворительно |
0,0 5 |
- |
|
Приложение 7
ЖУРНАЛ АНАЛИЗА НЕГАТИВОВ
|
№ координат меток |
Отсчеты x , мм |
Отс четы Z, мм |
LZ = x2 - x1 Lb = z3 - z4 |
ΔLг Δ Lb |
l1 l2 l3 l4 |
Δl |
Формулы |
|
|
|
|
Снимо к A 30 |
|
|
|
|
|
1 |
30,4 6 |
|
|
|
|
|
L 0 г = 161,91 L 0 b = 114,07 l 0 1 = 80,85 l 0 2 = 81,03 l 0 3 = 57,02 l 0 4 = 57,05 δf = K1ΔL2 = +0,18 x0 = K2(Δl1 + Δl2) = -0,14 z0 = K3(Δl4 - Δl3) = -0,12 |
|
|
|
1 61,93 |
+0,0 2 |
|
|
||
|
2 |
1 92, 38 |
|
|
|
|
|
|
|
3 |
|
465, 92 |
|
|
|
|
|
|
|
|
114,08 |
+ 0,01 |
|
|
||
|
4 |
|
3 51, 84 |
|
|
|
|
|
|
|
|
|
Снимо к B 37 |
|
|
|
|
|
1 |
31, 34 |
408,53 |
|
|
80,9 8 |
+0,10 |
|
|
2 |
1 98,40 |
408,53 |
16 2,06 |
+0,15 |
81 ,08 |
+0,05 |
|
|
3 |
11 2,3 2 |
465,60 |
|
|
57, 06 |
+0,04 |
|
|
|
|
|
11 4,1 4 |
+0,10 |
|
|
|
|
4 |
11 2,32 |
351 , 46 |
|
|
57,07 |
+0,02 |
Приложение 8
ВЕДОМОСТИ ДЕШИФРИРОВАНИЯ
|
№ бази сов и сн имк ов |
№ кон т уров |
С оде ржание кон тура |
П риме чание |
|
8 А -3 1 |
1 |
Выход грунт о вых вод |
|
|
2 |
Развалины каменного строения |
|
|
|
3 |
Яма с водой |
|
|
|
4 |
Р одн ик |
Не изобразился, получен линейными засечками |
|
|
5 |
|
||
|
6 |
|
ВЕДОМОСТЬ ИНЖЕНЕРНОГО ДЕШИФРИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ И ПРОМЫШЛЕННЫХ ПЛОЩАДОК
|
№ базис ов и снимков |
№ контуров |
С оде ржание кон тура |
П риме чание |
|
Ба з ис 1 7-21 |
1 |
Здание диспетчерского п ункт а, кирпи чное, шиф., 2 эта жа, хорошее |
Г аб ариты опре деляются по углам здания |
|
А-17 |
2 |
Ма тема тический цен тр СП-18, тя га ручная, цельнолитая крестовина, прав осторонний, рельс тип Р-43, бал ласт |
О бмер и опре деление ко ординат ЦСП производится графо- ана литиче ски м способ ом |
Приложение 9
ВЕДОМОСТИ ГЕОДЕЗИЧЕСКИХ КООРДИНАТ ОПОРНОЙ СЕТИ, БАЗИСНЫХ И КОНТРОЛЬНЫХ ПУНКТОВ
|
Наименование точек |
Ко о рд ин аты, м |
Примечание |
||
|
X |
Y |
H |
||
|
|
То чки магистрального хода |
|
||
|
П К 10 |
130, 60 |
84 6, 07 |
325,47 |
|
|
ПК 30÷75 |
|
|
|
|
|
|
О по рные точк и |
|
||
|
ОП- 1 0 |
151,80 |
1 010, 08 |
32 1 ,32 |
Замаркирован на местности |
|
ОП- 11 |
|
|
|
Телевизионная а нт ен на на крыше здания Предельный столбик |
|
ОП- 1 2 |
|
|
|
|
|
|
Кон т рольн ые пу нк ты |
|
||
|
КП-1 9 |
|
|
|
К ре ст на скале |
|
КП-20 |
|
|
|
Обоснование столба |
ВЕДОМОСТЬ ДИРЕКЦИОННЫХ УГЛОВ БАЗИСНЫХ И КОНТРОЛЬНЫХ НАПРАВЛЕНИЙ
|
Наименование точе к |
Приведенные горизонтальные направления |
Дирекционные уг лы |
Вертикальные углы |
|
|
Станция 8 A |
|
|
|
Т. VII |
0 00 00 |
24 38 15 |
-3 21 63 |
|
КП-19 |
73 10 12 |
97 48 27 |
-14 21 39 |
|
Скала |
78 36 18 |
103 14 38 |
+14 26 18 |
|
Т. X |
84 08 96 |
108 46 51 |
+13 45 15 |
|
8 B |
103 46 24 |
128 24 39 |
-2 27 57 |
|
Кус т |
285 34 48 |
310 13 09 |
+15 32 30 |
|
|
С та нц ия 8 B |
|
|
|
Т. X |
0 00 00 |
97 14 15 |
|
|
Камен ь |
.... |
|
|
|
.... |
|
|
|
|
8 A |
211 10 29 |
308 24 44 |
|
Приложение 10
ВЕДОМОСТИ КОНТРОЛЯ УГЛОВЫХ ЭЛЕМЕНТОВ ВНЕШНЕГО ОРИЕНТИРОВАНИЯ
Измере ни е к оорди нат точек контрольных направлений
|
№ точек |
От сч ет ы по шкалам |
Координаты точек на снимках |
Разности измеренных и вычисленных координат |
|||||||||
|
x′ |
z′ |
p |
q1 |
x1 |
z1 |
x2 |
z2 |
Δx1 |
Δz1 |
Δx2 |
Δz2 |
|
|
|
|
Стереопар а 30 A - 34 B (базис № 8) |
M 0 X = 100,00 |
M 0 Z = 100,00 |
|
|
||||||
|
КП-19 |
35 , 00 |
347,5 0 |
|
|
- 65,00 |
-52,50 |
|
|
-0,02 |
+0,0 3 |
|
|
|
т. VII |
104,32 |
388,50 |
|
|
+4,3 2 |
-11, 50 |
|
|
-0,03 |
+0,02 |
|
|
|
Пик скалы |
1 51 ,91 |
4 49,36 |
|
|
+51 ,91 |
+49, 36 |
|
|
-0,04 |
+0,03 |
|
|
|
|
|
|
|
|
|
|
Средн . |
-0,03 |
+0,03 |
|
|
|
Вычисление координат точек снимка по измеренным углам
f = 1 94 ,68
|
№ точек |
Горизонтальный угол от нормали к базису |
Доправка за центрировку |
d′ |
tgα |
x = ftgα |
β |
tg β |
|
|
КП -19 |
-18 27 1 5 |
1 5″ |
-1 8 27 30 |
0,333790 |
-64 98 |
-14 21 30 |
-0,255985 |
-52 53 |
|
т. VII |
+1 16 36 |
10″ |
+1 16 46 |
0,022332 |
+4 35 |
-3 23 03 |
-0,059134 |
+11 52 |
|
Пик скалы |
+14 56 12 |
1 5″ |
+14 56 27 |
0,266839 |
+51 ,9 5 |
+13 45 27 |
+0,244839 |
+49 32 |
Приложение 11
СТЕРЕОКОМПАРАТОР СТЕКО
Н аиб ол ее распространенный в настоя щее время стереокомпаратор стеко Народного предприятия К. Цейс, Иена (ГДР) позволяет измерить координаты x , z , продольный и поперечный параллаксы p и q сфотографированных точек местности.
С тереок омпа ра тор предназ на че н д ля изме рений снимков размеров до 13 ×1 8 (негат ив ов, диапозитивов и контактных отпечатков ).
Негативы и диапоз итивы освещаются верхними, а контактные отпечатки - нижними лампами.
Общая каретка перемещается левым ш тур валом . Подвижная часть бинокулярного микроскопа передвигается средним штурвалом, перпендикулярно направляющим общей каретки.
Смещения общей каретки и подвижной части бинокулярного микроскопа, соответствующие координатам точки ле в ого снимка, учитываются по счетчикам, цена деления которых составляет 0,02 мм, а точность отсчета ±0,01 мм. На время установки по ба раб анам нужных отсчетов штурвалы отключают.
Лев ую каре тку с о снимко дер жат елем мож но смещать относительно общей каретки вп раво на 37 мм и влево на 1 9 мм от начального положения и закреплять в нужном полож ении.
Прав ая к аре тка со снимк од ержателем перемещается п равым ш турв алом па раллельно нап рав ляющ им общей каретки. Э то движение, соотве тс тв ую щее горизонтальн ому пара лла ксу, учиты ваетс я счетчи ком, цена деления ко торого 0,005 мм, а точнос ть отс чета ±0,0 01 мм.
Дл я измерения вертикальных параллаксов пра вая под виж ная част ь биноку ля рн ого м икрос ко па перемещается при помощ и шайбы отн осител ьно левой подвижной ча сти вдоль ос и Z п риб ора. Вертикальный параллакс отсчиты ва ется по счетчику, име ющем у цену де ления 0,01 мм и точнос ть отсчета ±0, 002 мм.
Увеличение наблюдательной системы 8×. Рассто яни е между окуля рам и мож но изменять в пределах от 54 д о 76 мм. Фокус ировка п о глазу допускается в преде ла х ± 5 д иоптрий .
Резкость и з об ражения снимка дос тигаетс я вращ ением кольца подв ижн ого об ъек тива, дос туп к кото рому ос уществля ется через от верстие в пере дней час ти приб ора. На пра вой стороне приб ора креп итс я чертежный столик.
Л ампы осве щен ия пита ются напря же нием 220 В. П ри транспортировке отключают ве дущие ролики, зак ре пляющи е общую каретку.
Для получ е ния п ра ви льных з начений координа т стереокомпара тор долж ен отв еча ть сле дующ им условиям.
1. Бинокулярная система должна обеспечивать резкое изображение на обоих снимках без зрительного параллакса.
2. Перемещение основной каретки, оптической системы и правой каретки в направляющих должно быть прямолинейным.
3. Основные оси прибора x - x и z - z ( y - y ) должны быть взаимно перпендикулярны.
4. Направление перемещений правой каретки по осям x - x и z - z ( y - y ) должно быть параллельно соответствующим осям основной каретки.
5. Параллактические винты p и q не должны иметь люфтов.
Для проверки условий правильной работы в стереокомпаратор закладывают контрольные сетки.
Непрямолинейность основных направляющих и их неперпендикулярность, параллельность движения правой каретки и величины люфтов параллактических винтов не должны превышать 0,002 мм.
Измерения снимков в стереокомпараторе производят известными способами. При измерениях снимков, полученных с вертикального базиса фотографирования, их закладывают с разворотом изображения на 90°.
Ориентирование и измерение снимков
Для измерения снимков в стереокомпараторе негативы укладывают в кассеты эмульсией вниз примерно на середину кассеты и закрепляют зажимами.
Ориентирование снимков состоит в том, чтобы координатные оси снимков ( xx и zz ), определяемые центрами координатных точек, расположить параллельно соответствующим осям стереокомпаратора. Точное ориентирование снимков по оси XX достигают методом последовательных приближений. Для этого правую координатную метку левого снимка движениями x и z точно совмещают с измерительной маркой, а правую марку движениями p и q - с центром метки правого снимка.
После этого перемещают общую каретку влево движениями x , и наблюдаемое вертикальное отклонение марок относительно меток устраняется наполовину вращением кассет в своей плоскости по x , а наполовину движением z (для левого снимка) и движением q (для правого снимка). Эту операцию повторяют до тех пор, пока марки при перемещении каретки прибора по оси xx не будут отклоняться от координатных меток более чем на 0,02 мм.
Измерение координат наблюдаемых точек на стереокомпараторе выполняется следующим образом.
Движениям штурвалов x и z марки переводят в зону, где располагается измеряемая точка, а движениями ( p ) и, если необходимо, ( q ) вначале монокулярно, а затем стереоскопически добиваются получения пространственного восприятия модели (стереоэффект). Левую марку наводят на изображение измеряемой точки и совместными движениями p и q добиваются уничтожения поперечного параллакса. Затем, продолжая наблюдать стереоскопически, незначительным поворотом винта продольных параллаксов ( p ) «поднимают» марку над моделью и совмещают ее с поверхностью модели в наблюдаемой точке; записывают отсчет ( p ) и аналогичным образом повторно совмещают марку с моделью. Расхождение между отсчетами не должно превышать 0,02 мм, за окончательное значение берется среднее. Затем снимают отсчеты по шкалам x и z , а если необходимо, и q .
Приложение 12
СТЕРЕОАВТОГРАФ 1318
Принципиальная схема
Стер ео авто граф пред наз на че н для составления планов графо-механическим с пос об ом ; он представляет собой соединение стереокомпаратора с системой линеек, позволяющих механически решать прямую засечку.
Решение прямой засечки в п лос кос ти XV осуществляется при помощи ли н ей ки направлений L и линейки параллаксов p (рис. 1), вращающихся вокруг т оче к S 1 и S 2 , соответствующих цен трам п роек тирования . Линейки L и p специальными тя гами свя заны соответственно с левым и пра вы м с пис ками , п риче м ра сст ояния точек присоединения тяг от точек S 1 и S 2 м огут быть сделаны равными фокусн ом у расстоянию съемо чн ой к амеры ( f ). В положении , когда линейки параллельны друг другу и перпенд ик уля рны направлению S 1 и S 2 (базису ), м ар ки д олжны быть совмещены с главными точками снимков. Е сли тепе рь навести марку стереок омпа ратора и связанные с нею концы линеек на изображение точки M ( m 1 и m 2 на снимках ), то пересечение линее к L и p определит плановое положение точки M в масштабе L . Если расстояние между точками S 1 и S 2 будет равно
![]() ,
,
гд е B - значение базиса фотографирования ,
то п оложен ие точки M п олучим на планшете в масштабе плана t .
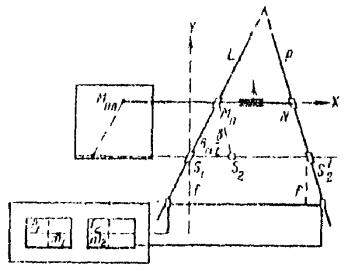
Р ис . 1
Кон с трукти вное плановое п оложение точек определяется с пом ощ ью мостика и каретки отстояний, имеющей ролики M 0 и N , по к от орым перемещаются линейки L и p .
К а ретка отстояний может перемещаться по направляющим x - x мостика отстояний, который в связи с чертежным устройством для фиксирования точки M пл на планшете .
Таки м образом осуществляется засечка в плоскости X - Y для нормального случая съемки.
Для решения задачи в с лучае равноотклоненных осей правый р оли к N может перемещаться в базисных напр авля ющих относ ител ьно левого, что соотве тств ует разложению базиса по осям X и Y ( BX и BY ). П ри этом , если уго л скос а осей равен φ, то
BX = Bcosφ и BY = Bsinφ,
гд е B - базис фотографирования в масштабе съемки.
Для опред е лен ия высот наблюдаемых т очек стере оавтограф снабжен устройством, состоящим из двух жестко скрепленных под прямым углом линеек f и H (рис . 2), вращающихся вокруг точки S ′1 , соответствующей левому це нтру про екти рования .
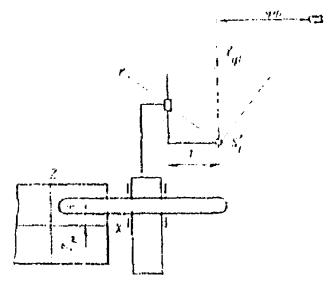
Р ис . 2
Коро тк ая линей ка с помощью
каретки фокусных расстояний жестко связывается с бинокулярной системой; ее
длина может устанавливаться на заданное фокусное расстояние. Свободный конец
большой линейки лежит на каретке высот мостика отстояний. При перемещении
бинокулярной системы на величину, равную Z , ведущий ролик каретки высот переместится по мостику отстояний на
величину ![]() , т.е. определит превышение наблюдаемой точки над центром
проекции левого снимка в масштабе модели.
, т.е. определит превышение наблюдаемой точки над центром
проекции левого снимка в масштабе модели.
Кра т кое опис ание
Ст ереоавт ограф 131 8 состоит из мостика микроскопов, системы линеек и мостика отстояний.
Сте реоавт ог раф снабжен координатографом с ра зличн ым и пере даточным и соотношениями - 0,5; 1 ,0 и 2,0. На массивной станине укреплены главн ые направля ющие мос тика отс тояний и цилиндричес кая направл яющ ая, по ко тор ой перемещ аются ка рет ки со снимками. На мости ке мик роскопов и л инеек разм ещ ены два отс четных мик роскопа, бинок уля рны й микроскоп дл я наблюдения снимков и четы ре развертывающих линейки - линейки направ лен ий L и па рал ла кс ов p и дв е линей ки выс от H , H ′ . Ос и вращения плановых линеек ( L и p ) р асп оложе ны п од мос тиком микроскопов, а ос ь в ращения вы сотны х ли не ек - на доп олн ите льной плите . Стереок омпа ра то р с систе мой раз вертыва ющи х линеек ус танов ле н на ма ссивной стан ине.
Каретки снимко в стереок омпара тора с помощью спе циа льных тяг , которы е в с лучае не обх одимос ти можно отклю ча ть, связаны через каретки фокус ных ра сс тояний с основными линейка ми L и p .
Пр а вая л инейка p имеет корректор конвергенци и γ, при п ом ощи ко торого коротко е плечо лин ей ки п оворачив ае тся относ ите льно длинного вокруг точки правого цент ра проект ирования S 2 винто м. Угол конв ерге нц ии отс читы вае тся.
Р ас стоян ия от точек вра щения линеек S 1 и S 2 до в е дущ их роликов каретки фокус ных расс тоя ний м огут из мен яться от 1 57 до 1 98 мм и отс читы ваются по индикат орам.
Мо с тик отстоя ний МО пере мещае тся п о направля ющим Y - Y , а ка ретка отстоя ний КО с помещенн ыми в ней длинными конца ми лин еек L и p - по оси в напр а вля ющ их м остика отстояний.
В е дущий рол ик правой линейки может перемещаться относительно вед ущег о ролика левой линейки в на прав лен ии X и Y с п омощ ью винтов. Э то перем еще ние, соот ветствующее разложен ию базиса на составляющие bX и bY , отсчитывается с помощь ю ин дикаторов. Каретки левого и п равого сним ков связанны также с высо тны ми линейк ами, ко рот кие плечи которых н аходятся в каре тках фокус ных расс тоя ний. З начение фокусного расстоя ния может б ыть ус тановлен о с помощью индикаторов.
Д линн ые концы высотных линеек леж ат на каретке выс от, пе рем ещающейся в направляющих мостика отстояний п о оси X - X . Ос н овной я вляется левая высотная линей ка ; правая линейк а вы сот с лужи т только для того, чтобы при на блю де ния х ввод ить поправки з а поп еречн ый парал лакс из-за разности высот ле вого и п равого це нтров фотографирования. Для этог о ве дущий ролик правой линей ки высот перемещае тся относительно на чальн ого по ложени я (левог о ролика) на в еличины BY и BZ ( проекци я базиса фотографирования на о си Y и Z ).
Мостик отсто я ний п ри помощи ш турв ал а Y пе ремеща ется п о осн овным направляющим, прикрепленным к станине. На нем имеются нижни е и верхние нап равляющ ие. По ниж ним на правл яю щим штурв алом X п е ремещ аетс я к аретк а отстояний, а верхние служат для перемещения каретки высот ножным диском Z . Приводы штурвалов X и Y снабжены переключателями скорости движений (для ор иенти ро вания и об раб отки снимков) и счетчика ми с ценой деления - 0,1 мм.
Счетчик высот позволяет отсчитывать высоты наблюдаемых точек (в м ): при масштабах 1:800, 1:2000, 1:4000 - п о красны м, а 1 :1 000, 1 :25 00, 1:5000 - по белым цифр ам .
Объективы наблюдательных микроскопов могут перемещаться по оси Z в по ложе ния, со от ветствующие смещению объективов съемочной камеры. В фокальной п лос кос ти каж дого м икрос копа наб люда те льн ой системы введены световые марки. Уст анов ку глазн ого базиса и фокусировку выполняют обы чным путем.
Сни м ки или юстировочные се тки ус танавлива ют на ка ре тках с помощью цент рирую щих штифтов. Центрировк у с ним ков в снимкодержателе вы полняют на световом пульт е с помощью на кла дного мик роскопа .
Техническая хара кте рис тика
Фокусное расстояние прибора ........................................................................... 157 - 198 мм
Перемещение объективов наблюдательной сис темы (смещение горизонта) +3 0 - 45 мм
К он вергенц ия правой линейки ................................................................................... +5 q - 2 q
Б азисные составляющие, мм:
bX .................................................................................................................................. 0 - 60
bY ................................................................................................................................ + 3 - 2 0
bZ .............................................................................................................................. +10 - 1 0
Пределы ко о рдинатны х движе ний, мм :
X .......................................................................................................................... -2 2 0 - + 220
Y ........................................................................................................................... +50 - +400
Z .......................................................................................................................... -235 - +235
Поверки*
* Фототеодол и тная съем ка в кр упных м асшт абах. ВНИМИ, 196 0.
Перед юстировкой станина прибора долж н а быт ь при ве дена в горизонтальное положение . Это выполняется путем последовательной установки накладного уровня на ц илиндрическ ую направляющую карет ок снимк оде рж ателе й и по направляющую каретки отстояний; п узырек уровня выводится на середину с пом ощью подъем ных винтов на с танинах прибора.
Д а ле е на отсчетны х устр ойств ах базисных с оста вляю щих b X ; bY ; bZ конв ер ген ции γ и смещения объ ективов ус та навливают от счеты , равные нулю, а на и ндикатора х фокус ных расс тояний - наибольшие и равные друг другу отс четы.
Ко нв ергенция правой плановой линейки
В исходном поло ж ении (γ = 0) на правляющие ребра предметного и ка ртинного плеч правой плановой линей ки должн ы лежать на од ной прямой. Проверка этого у словия выполняется в сле дующем п оря дке.
1. Счетчик коо рдина т Y уст а навлива ют в та кое положе ние, при кот ором отс четы по не му будут п рим ерно с оответствов ать действительному расстоянию Y . Для э то го вращение м шту рва ла совме щают белый штрих, нан есе нный на каретк е отстоян ий, с к раем мостика линеек и устанавливают на с четчике отсче т 200, 00 мм.
2. Маркируют кружками или точками центры контрольных се ток и уста нав лив аю т сетк и на каретки сним ков.
3. М остик отстояний ставят в такое положение , чтобы отсчет по счетчи ку Y был цел ы м чис лом , близ ким к наибольшей в еличине Y , н апример 400 мм .
4. Правую из ме рите льную м арку устан авлив ают н а край ни й (вос ьм ой са нтиме тровы й) штрих се тки в право от центра и бе рут отс чет X 1 по счетчи к у X .
5. Правую измерительную марку у с тана влив ают н а цен тральны й крест сетки и берут отсчет X 0 . П равую изме рительную марку уста навливаю т на восьмой с анти метровый вертикальный штрих сетки влево от центра и берут отсчет X 2 .
6. Вы числяют раз ности X 1 - X 0 = XR ; X 0 - X = XL и величину конв е ргенции по формуле
![]() .
.
Угол α о п ределя ют из соотношения
![]()
Пример . Д ля вел ичин ы γ = 400 мм и f = 1 98 мм конвергенция составит
γ = ( XR - Xi )26′,
если разность будет вычисляться в мм . Если, например
XR - XL = 0,04 мм, то γ ≈ 1′.
7. Исправляют положение нульпункта отсчетного барабана конвергентного устройства. Для этого отпускают зажимные винты отсчетного барабана и поворачивают его до тех пор, пока отс че т по не му не стане т равен вычи сле нному значению; после этого барабан закрепляют.
8. Ослаб и в зажимно й винт , уст анавливаю т бара бан в положе ние γ = 0 и для контроля п равил ьн ости юстировки все операции пов торяю т.
Измерительные марки
Ч тобы опре делить, т реб уется ли юстировка положе ния измерительны х марок , устан авл ивают кар етку отстояний в крайне е д альнее положе ние и совмещают л е вую измерительную м арку с цент ром к онтрольн ой сетки . Затем каретку п риб лиж ают до о тстояни я 7 0-100 мм и вн ов ь н аблю дают марк у. Если марка отошла от цент ра сетки более чем на четве рть свое го диамет ра, нео бходим о произвести юсти ровку.
Ю с тиров ку каждой изме рительной марки ре ком ендуется вы полня ть в два этапа: вн ачале устранить смещение м арки по гориз он тали, зате м - по в ертикали .
Устранение с м ещ ения левой м арки по горизонт али п роизводя т в сле дую щем поря дке.
1 . Ус тана влив аю т мост ик отстояний в да льнее положение (отс чет Y 1 = 400 мм).
2. И зм ери тельную марку штурвалами X и Z сов м ещают с цент ральным (нулевым) вертикальным штрихом контрольной се тки (точка 1, рис. 3) вблиз и центрального пере кре стия и зак репляют с топор штурва ла X .
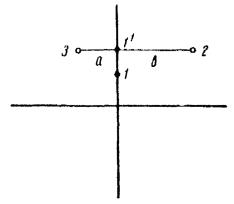
Рис. 3
3. Штур в алом Y карет ку отс тояний ставят в ближнее полож ен ие (отс чет Y г = 100 м м); при этом м арка сместится с н улев ого ш триха и займет положение 2.
4. Штур в алом X ( п осле открепле ния ст опорного ви нта) перем ещают марку в направ лени и, противоположном в идим ом у см ещению, в положе ние 3 так, чтобы е е сме ще ние относ ите льно н уле вого штрих а сетки было рав но
![]() ,
,
гд е b - види м ое сме щение м арки в положение 2;
ΔY = (Y1 - Y2).
Величина d оценивается на глаз в долях сме щ ен ия b . На п ример:
если Y 1 в 400 мм, Y 2 = 1 00
мм, то ![]() .
.
5. Затем юстировочным винтом изм е рительную марку вн овь совмещают с нулевым вертикальным штрихом сетки (положе ние 1° на рис. 5). Если те перь воз вра тить каретку отс тояний в дальнее положе ние (отс чет Y 1 ), то измерительная м арка не должн а сойт и с н улево го ш триха с етки. В случае не большого ос тат очного см ещения юс тировку следует повторить.
Так выполн я ют юстировку марки по ве ртикали; при этом ее с овмещают с ну левым гориз онтальный штрихом, а п оправляю т с оответ ствующ им юс тир о вочным винт ом.
Закончив исправление, м арк у совмещают с центральным крестом сетки и перемещают каретку отстояний шт урва лом Y по все му диа па зону переме ще ния (от Y 1 до Y 2 ). П ри п равильно выполненной юстиров ке марка не долж на смещается с центра льного креста сетки .
Ана логи чно юсти руе тся правая марка.
Индикаторы фок усных расстояний
И нд ика торы устан овк и ф окусны х расст оян ий для все х чет ыре х линее к юс ти рую тся одним и тем же сп особ ом. Для ин дикаторов плановых линеек из рис. 4
![]() . (1)
. (1)
Для фок усны х расст ояний высотных линее к по аналогии
![]() . (2)
. (2)
Для повышения точности определений отрезки сетки Δ X или ΔZ и ра з ности отст оян ий Δ Y сл е дует выби ра ть по воз можности большими.
Р ис. 4
Юс тировку индикаторов плановых линеек производят в сле дующем поряд ке:
- устан авл ивают ка ретку отстояний в дальнее полож ение (отсчет Y 1 = 40 0 мм);
- наводят марку на крайний правый штрих сетк и ( x 1 ) и б е рут отсчет X 1 по счетчику X ;
- наводят марку на левый кр ай ний шт рих сетки ( x 2 ) и берут отсчет X 2 ;
- перемещают каретку отстояний в ближнее положение (отсчет Y 2 = 100 мм);
- устанавливают марку на правый штрих сетки ( x 1 ) и б ерут отсче т X 3 ;
- устанавливают марку на левый штрих сетки ( x 2 ) и берут отсчет X 4 ;
- вы числ яю т разнос ти Δ Y = Y 1 - Y 2 ; ΔX 1 = X 1 - X 2 ; ΔX 2 = X 3 - X 4 ; ΔX = ΔX 1 - ΔX 2 и Δx = x 1 - x 2 ;
- в ы числяю т фокус ное расстояние f ;
- устанавливают и нд икатор на вычисленное значение f .
Вид индикатора показан н а рис. 5. Устанавливают его на вычисленное значение f вращение кольца с накаткой 3. Для этого ослабляют (вращение влево) кольцо с накаткой 2 и, вращая кольцо 3, устанавливают на индикаторе вычисленное значение f , после чего вновь закрепляют кольцо 2.
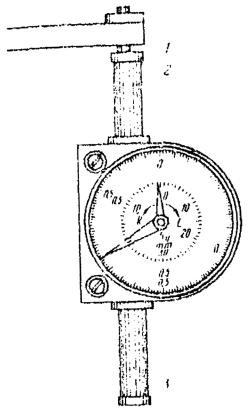
Рис . 5
Юстировка индикаторов высотных линеек отличается только тем, что установки производят соответственно по крайнему верхнему Z 1 и крайнему нижнему Z 2 штрихам сетки, а отсчеты Z 1 , Z 2 , Z 3 и Z 4 берут по счетчику высот при установке на масштаб 1:1000 (цена деления счетчика 0,1 мм ).
Пример юстировки индикаторов
Дальнее положение
y 1 = 400,00 мм X 1 = 656 ,8 7 мм
x 1 = + 80, 00 мм X 2 = 333, 50 мм
x 2 = - 80, 00 мм ΔX 1 = 323,37 мм
Бл иж нее пол ожение
Y 2 =1 00, 00 мм X 3 = 535,69 мм
x 1 = +8 0, 00 мм X 4 = 454 ,73 мм
x 2 = - 80,00 мм Δ X 2 = 80,9 6 мм
Δ Y = 30 0, 00 мм
ΔX = 242,41 мм
Δx = 1 60,00 мм
f = 19 8,01 мм
Такие изм е рен ия с пос ледующим вычислением фокусных расст ояни й производят для каждой лин ейки, пос ле че го на всех инд икатора х устан авливают одинаковое значение f , бли з кое к максимальному (н априм ер, 198,00 мм).
И нд ика то ры базисных составляющих bX и bY
Отсчеты по и н дикаторам баз исных с ос тавля ющих долж ны быть равн ы ну лю, после того как плановые, а также высотны е лин ейки ус тановле ны п аралл ельн о друг другу (при наве ден ии марок на центра льные крест ы сеток ). Ю сти ровку произ водят в с ле дующем порядке .
1 . Смещ ают ка ретку отс тоян ий в ближн ее положе ние
Y = 1 00, мм.
2. Ус танавливают измерительную марку на центральны й штрих сетки .
3. Вращают ма ховичок bX до т е х пор, п ока правая из мерите льн ая м арк а не совм ес титс я со с редним верт икальным штрихом юстировочной сетк и.
4. Устанавливают и ндика то р на от счет bX = 0, 00 мм. Уст ановка выполняется так же, как и на инди каторах фокусны х расстоя ний.
5. Проверяют юстировку; для этого к а ре тку отст оян ий переме щают на весь диапазон до Ymax . При э том ни одна из двух измерительных ма ро к не долж на смещаться по направ лению X .
Юс ти ровку ин дикатора bZ прои з водят таким же образом. При эт ом измерительные марки совмещают с центральным гориз онтальным шт рих ом сетк и, а н а индикаторе устанав лив ают отс чет bZ = 0, 00 м.
Инд икато ры базисно й с ос тавляющей bY
При уст а нов ках базисных сост авляющи х bX = bY = bZ = 0 лин е йки в любом положе нии должны б ыть параллельн ы друг другу, а расст ояния меж ду т очк ами враще ния лин еек и тем и т очками, в которых линейки соприк асаются с роликам и каретки X и ли Z , равны друг другу и со в падат ь с пок азаниям и с чет чика Y .
С огласно рис. 6, для пл ановы х лин еек в да льнем положении (отсчет Y 1 ) получ им:
![]() .
.
А налогично для высотн ых лин еек
![]() .
.
Юстировка считается выпол ненной правильно, если вычисле нные п о ф орм улам ( 3) и ( 4) расстояния Y 1 для всех че ты рех линеек равны и совпадают с отсчетом Y . Юстировку вы п олня ют следующим образ ом.
1. Исполь з уя да нные, получе нные при юст ировке индикаторов фоку сных расст оя ний по фо рм улам ( 3) и ( 4), в ычисляют Y 1 для вс е х четы рех л инеек .
2. Определ я ет разности величин Y 1 , пра в ой и левой линеек (пла нов ых и высотны х)
Y1 п - Y1 л = d .
3. Полученные з начения d уст а навливают на соответс твующи х индикатора х bY (положительные - по ш кале с коса вправо, о три цате льные - по шка ле скоса влево). З атем, не изм еня я базисных установок, ставят на индикаторах bY нулевые от с четы (ана ло гично описа нному ранее).
4. Не мен яя установки кар етки о тстоян ий, за кре пля ют ш тур вал и ус та на влива ют счетчик на с реднюю величину из опред елен ий по лев ым плановой и высотной линей кам.
Правильность юстировки проверяют по в торение м описа нных о пе ра ций.
По оконч а нии юстировк и производя т общий контроль рабо ты прибор а путем наб людения контрольных сеток. При этом баз исные составляющие и конверген цию уста навливаю т на нулевые отсчеты, а на индикаторах все х четырех линеек с тавят одинаковое фокусное расстоя ние. Если теперь на левой сетке прой ти марк ой по прям оуголь нику, углы ко торого име ют координ аты:
x 1 = + 80 мм; z 1 = -80 мм; x 2 = +80 м м; z 2 = + 60 мм;
x 3 = +80 мм; z 3 = -60 мм; x 4 = -80 м м; z 4 = -60 мм,
то на правой сетке светящаяся марка должна с овмещаться с идентичным и т очками. Это относится та кже и ко всем остальным точкам сетки при любом положении каре тки отстоян ий . Поэтому указа нный контроль следует произв ести как в ближ нем, так и в дальнем полож ения х каре тки.
Приложение 13
ЖУРНАЛ
ОБРАБОТКИ СНИМКОВ НА СТЕРЕОАВТОГРАФЕ
|
Базис № 8 Элементы внешнего ориентирования Стереопара 30А - 32В Длина базиса B = 74,54 Превышение H = 7,85 Угол скоса φ = 0°00 |
Установочные элементы f л = 194,74 f п = 194,74 γ = 0 Δ z = +10 |
Орие н тиро ва ние мод ели в плане
|
№ пп |
Обо з начения действий |
Зн ачение величин |
Примечание |
|
1 |
Y′1 |
36 1,4 |
|
|
2 |
ΔY′1 |
+ 0,5 м |
|
|
3 |
Y1 |
36 1, 6 |
|
|
4 |
ΔY 1 |
+0, 2 |
|
|
5 |
ΔY 2 |
+0,1 -0,2 |
|
|
6 |
ΔY 3 |
-0,3 -0,2 |
|
|
7 |
ΔY 1 |
-0, 1 |
|
|
8 |
ΔY 2 |
- 0,4 |
|
|
9 |
ΔY 3 |
-0,3 -0,27 |
О риен тировани е модели по выс оте
|
Обо з на чения точек |
Отметки |
Δ Aм |
|
|
геодезич ес кие |
ф отог рамм етр ически е |
||
|
Δ1 |
856,2 |
8 57 ,0 |
-0,8 |
|
Δ1 |
856,1 |
856,1 |
+0,1 |
|
Δ |
91 2,4 |
91 2,5 |
-0,1 |
|
Δ |
923,7 |
923,5 |
+0,2 |
Приложение 14
МЕТОДИКА АНАЛИТИЧЕСКОГО СГУЩЕНИЯ ОПОРНОЙ СЕТИ ПРИ СТЕРЕОФОТОСЪЕМКЕ ПРОТЯЖЕННЫХ КОСОГОРОВ
I . Исх одны е данн ые
1. Измеренные в поле базисы фотографирования b 1 , b 2 , ..., bn и значения их дирекционных углов в фотограмметрической системе к оординат d 1 , d 2 , ..., dn .
2. Контрольные направления, измеренные теодолитом на каждой съемочной ситуации.
3. Отсчеты по шкалам стереокомпаратора при измерении координатных меток и связующих, опорных и определяемых точек снимков Xi , Zi , pi , qi .
4. Геодезические координаты опорных точек и приближенный угол поворота между фотограмметрической и геодезической системами координат Δ x 0 (см . рис. 10 настоящих Указ аний).
II . Обработка одиночных фотограмметрических моделей
1. Вычисление плоских к оо рдинат измеренных точек снимков:
а) находят места нулей параллактических шкал стереокомпаратора по отсчетам на координатные метки :
MOp = 0,25( p л + p п + p в + p н );
MOq = 0,25( q л + q п + q в + q н ),
где p л , p п , p в , p н - отсчеты параллак сом при стереоскопическом наблюден ии верхней, нижней , левой и правой к оординатных меток;
q л , q п , q в , q н - аналогичные отсчеты по шкале попе ре чных п ара ллаксов;
б) вычисляют приведенные от с четы на метки и точки правого снимка:
X′i = Xi - (pi - MOp);
Z′i = Zi - (qi - MOq);
в) н а ходят места нулей коорди н атны х шкал и п риведен ны х отсчетов право го сн им ка:
 ;
;  . (1)
. (1)
Аналогично н а ходят места нулей приведенных отсчетов правого снимка MO ′ X , MO ′ Z по от с че там на координатные метки правого снимка, полученным в п. б;
г) вычи с ляют плоск ие координаты измеренных то чек левого и правого снимков:
xi = Xi - MOX; x′i = X′i - MO′X;
zi = Zi - MOZ; z′i = Z′i - MO′Z.
2. Определение поправок в элементы внутреннего и угловые элементы внешнего ориентирования по измеренным контрольным направлениям:
а) на каждо й станции измеряют не менее четы рех контрольных направлений, располагающихся, примерно, по углам рабочей площади снимка. По измеренным направлениям находят горизонтальные и вертикальные углы между контрольными точками и направлением оптической оси
d = βb - βm - φ,
гд е βb - н а правление на правую б азисн ую точку;
βm - направлени е на контрольную точку снимка;
φ - заданный угол скоса.
Если измерения выполняли на правой точке фотографирования, то
d = βm - βb - φ;
б) по полученным горизонтальным и вертикальным углам вычисляют плоские координаты точек контрольных направлений:
x0i = ftgα; z0i = fsecditgvi,
где vi - из меренный вертикальный уго л.
Наход я т разн ости ме жду вы чис ленными и измеренными значениями координат то чек
lxi = x0i - xi; lzi = z0i - zi.
Ес ли li ≤ ±0 , 02 мм, то принятые элементы внутреннего и вне шнего ориентирования считаются достаточно точными и дальнейших вычислений не производят;
в) п опра вки в принятые значения элементов внутреннего ориентирования и углового ориентирования камеры на станции находят, если l ≥ 0,02 мм. При этом составляют систему уравнений погрешностей вида:
 (2)
(2)
где xi , zi - измеренные н а сним ке коо рдинаты то чек конт рольны х направлений;
 - разнос т и вы чис лен ны х и измеренных пл оск их к оординат;
- разнос т и вы чис лен ны х и измеренных пл оск их к оординат;
δ f , x 0 , z 0 - поправки в значения фокусного расстояния и коор д ин ат главной точк и;
δα, δω, δ x - поправки в принятые углы наклона и пов о рота снимка .
Систему уравнений ( 2) решают по с пос обу н аимен ьших кв адратов, в результате решения н аходят поправ ки в принятые зн ачения элементов внутреннего и внешнего ориентирования.
Для дальнейшей обработки используют исправленные значения этих элементов.
3. Вычисление пространственных фотограмметрических координат измеренных точ е к.
Пространственные фотограмметрические координаты связующих и опорных точек снимков находят по известным значениям базисов, их дирекционным углам и исправленным по контрольным направлениям элементам внутреннего и внешнего углового ориентирования снимков .
При этом используют фор м улы обще го случая съемки применительно к базисной системе координат:
 (3)
(3)
Здесь: Bj - значение базиса ф от ографи рования;
αj - дир екци онные угол базис а фот ограф иров ания ;
X ′ i Y ′ i Z ′ i и X ″ i Y ″ i Z ″ i - координа ты соответственной точки л евого и право го сн имков;
X′i = a1xi + a2f + a3zi; X″i = a′1x′i + a′2f + a′3zi;
Y′i = b1xi + b2f + b3zi; Y″i = b′1x′i + b′2f + b′3zi;
Z′i = c1xi + c2f + c3zi; Z″i = c′1x′i + c′2f + c′3zi;
a 1,2,3 , b 1,2,3 , c 1,2,3 , a ′1,2,3, b ′1,2,3, c ′1,2,3 - направляющие косинусы, получаемые по исправленным углам накл о на и пов орота левого и правого снимков.
III . В ы чис ление координ ат оп орных и связующих точек в общей сис теме фотограмме тричес ких коорд ина т
В с оответствии с выра ж ениям и ( 3) коорд ина ты точек в каждой модели получаются в об щей ориен тировке относи тельно п риня того направления ос ей фотограмме тричес ких к оординат (см. рис. 1), но с частн ыми н ачалам и в левы х цен трах фотогра фи рова ния.
Для получени я з на че ний координа т относительно общего на чала (об ычно в левом центре фотогра фирова ния пе рвой сте реопары) использую т координат ы не мене е трех общих связующих точек на пере крытии смежных моделей:
Xφij = Xij + X 0 j ;
Yφij = Yij + Y 0 j ;
Zφij = Zij + Z 0 j .
Разности н а чал коор динат получаю т последовательно по общим связующим точкам:
 (4)
(4)
гд е Xij - коорд ина ты, полученные в преды дущ ей м одели;
Xj +1 - координат ы, п олучен ны е в последующей м од ели;
![]() - вес точки, з ави сящей от ее отстояния
от ста нции ( в
сотнях м).
- вес точки, з ави сящей от ее отстояния
от ста нции ( в
сотнях м).
Та ким образ ом, последов ательно н ах одят координ аты всех определяемых и опорных точек в фотограмме три че ской системе координат с началом в левом цен тре фотографирования первой модели.
Одновременно получают координаты все х левых ц ен тров фотографирован ия к ажд ой мод ели в этой же системе к оорд ина т
( X 02 , Y 02 , Z 02 ; X 03 , Y 03 , Z 03 ..., X 0п , Y 0п , Z 0п ).
IV . Геодезическое ориентирование и уравнени е фотог раммет ри ческой сети
По к о ординатам опорных точек, включенны х в пос тр оен ие (рис . 22 Указаний ) произ водитс я геодезическое ориентирование и уравнивание пос троенной сети . При этом геодезические к оординаты опорных точек записывают так, чтобы знаки приращения абсцисс в фотограмметрической системе с оответ ствовали знак ам п риращения ординат геодези ческой системы координат. Есл и положительные направления координатных осей геодезической системе не совпадают с указаниями на рис. 22, то изменяют знаки геодези ческих к оордин ат опорны х точек.
Элементы преобразования фотограмметрических координат и гео дезическую сист ему ( X 0г , Y 0г , Z 0г , d , β , γ , t ) находят путем р е шен ия системы уравнений погрешност ей ви да:
δ X 0г - Xiδα + 0 - Ziδγ + Xiδt + lxi = vxi ;
δ Y 0г - 0 - Yiδβ + Ziδγ + Yiδt + lyi = vyi ; (5)
δ Z 0г + Xiδα + Yiδβ + 0 + Ziδt + lzi = vzi ,
гд е Xi , Yi , Zi - ф отограммет ри ческ ие координ аты опорных точек,
lXi = Y г i - (Xφi + Y′0);
lYi = X г i - (Yφi + X′0);
lZi = Z г i - (Zφi + Z′0);
X ′0, Y ′0, Z ′0 - приближенные геодезические коорд ин аты фотограмметрического на чал а к оо рдин ат (левого центр фотографирования п ервой м одели).
Геодезические координаты вс ех точек опо рной с ети и левых центров фотографирования всех моделей н аходя т по полученным элементам преобразований в соответствии с выражениями:
X г i = X 0 + ( b 1 Xφi + b 2 Yφi + b 3 Zφi )(1 + δt );
Y г i = Y0 + (a1Xφi + a2Yφi + a3Zφi)(1 + δt);
Z г i = Z0 + (c1Xφi + c2Yφi + c3Zφi)(1 + δt);
X0 = X′0 + δX0; Y0 = Y′0 + δY0; Z0 = Z′0 + δZ0,
где
a 1,2,3 , b 1,2,3 , c 1,2,3 - направляющие косинусы, получаемые по известным формулам по найденным поправкам.
Ура в нения вида ( 5) решают по способу наименьших квадратов, причем для каждой опорной точки находит все уравнения по формуле
![]() ,
,
где Yi - отстояние в сотнях м, полученное при вычислении начальных фотограмметрических координат этой точки.
Для вычисления семи неизвестных элементов преобразований с оценкой точности необходимо иметь не менее четырех опорных точек, расположенных по концам съемочного участка на ближнем и дальнем планах. Для контроля правильности результатов измерений и вычислений в средине участка необходимо иметь не менее 1-2 опорных точек.
В результате вычислений находят геодезические координаты связующих точек и левых центров фотографирования каждой стереопары. Координаты связующих точек используют как контрольные при составлении топографических планов оптико-механическим путем в стереоавтографе.
V . Сред н ие кв адрати ческ ие ошибки определения координат точек опорной сети при сгущении по изложенной методике для середины вида находят из выражений:
 ;
;
 ,
,
где n - число передач (число моделей).
Полагая, что ошибки в положении точек опорной сети не должно в среднем превышать 1,5 m , где m - ошибка определения координат в пределах одной фотограмметрической модели, допустимое число передач n может достигать 7-8 моделей.
Приложение 15
МЕТОДИКА АНАЛИТИЧЕСКОЙ ОБРАБОТКИ МАТЕРИАЛОВ НЕОРИЕНТИРОВАННОЙ СТЕРЕОФОТОСЪЕМКИ С ИСПОЛЬЗОВАНИЕМ ЭВМ
1. Область применения
Аналитическая обработка м ат ериалов наземной стереофотосъемки производится в тех с лучая х, когда эле менты внешнего ориен тирован ия ка ме ры точно ус тановить невозможно. Наприм ер, при съе мке плос ких участк ов с высоких неустойчивых оп ор. В этих случаях элементы внешнего ориентирования сним ков опреде ляю т п риближе нно, а ка ждая стереопара обеспе чивается опорным и точка ми, расп олагаю щимися, примерно, по углам раб очей п лоща ди. Общ ее чис ло опорн ых то чек долж но бы т ь не м енее пяти на кажд ую пару снимков. О риенти ровочн ые схемы расположения опорных точек п риведены на рис. 6 У казаний .
II . Ис ходные данные
1. От счеты по шкалам стереокомпаратора на координа тные м етки, опорны е и орие нтирую щие точки xi , yi , pi и qi .
2 . Элем енты внутреннего ориентирован ия ф оток ам еры
f к , x0, z0 .
3. П риб лиженные з начения ЭВО сним ков.
4 . Геодезические координат ы о порн ых т оче к.
III . Измерение сним ков и вычислени е плоских координа т точек
С н имки ориентируются в стереокомпараторе по координатны м меткам и изме ряю тся с получением отсчетов по шкалам Xi , Yi , pi , qi на метки, о по рные, ориен тирую щие и оп ределяемые точки.
Плоские к о орд инаты лево го и право го снимков стереоп ары вы числя ют по зависимостям, из ложенным в п ри ложен ии 17.
IV . Определение ЭВО снимков в принятой системе координат
Построение геодезической модели с определением ЭВО снимков производят путем ориентирования в принятой системе с координат левой и правой одиночных связок с одновременным учетом условий компланарности одноименных ориентирующих лучей .
При этом поправ к и в приближенно заданные значения ЭВО левого и пр авого снимков находят из решения системы уравн ений погрешностей, кот орые дл я каждой опорной то чки, изобразив шейся на обоих с ним ка х, имеют ви д:
 (1)
(1)
Коэфф и цие нты этих уравнений находя т по измеренным п лоским ко ордина там точек снимков и приб лиж енн ым ЭВО в соответствии с зависимостями ( 14 и 15) настоящ их Ук аз аний.
Дл я нахож дения поправок к приближ енн о з адан ным ЭВО левог о и правого снимков с оценкой точн ос ти необ ходим о име ть не менее четы ре х опорных точе к на каж дую стереопару.
С истем у уравнений вида ( 1) решают по способу наименьших квадратов с переходом к м атрице норм альных уравнений 1 2-го поря дка. П ри этом уравне ниям типа II с истемы придается вес Pq , равный о тн ош ен ию к вад рат ов с редних к вадратических ошибок идент ифик ации, измерения координат опорных точек и измерения продольны х пар аллаксов. П ри нимая mp = ± 1 0 мкм, а mx = mz = ±20-3 0 мкм ( с уче том оши бок идентификации), получим Pq = 4-9. Вес остальных уравне ний ( I и III ) п ринимается равным 1.
Задача в целом решается и т ерат ивны м п утем с посл едоват ельны м ут очнением з начений неизве стных.
В ре з уль тате реш ения нахо дят л инейн ые и угловые ЭВО обоих снимков стереопары в принятой с истеме координат.
У добнее реша ть в фотограм метричес кой с ист еме коорди нат, для че го геод ез ические коо рдин аты оп орных точек п редва рительн о п ре образовы ваю тся в эту систему. Для случая решения задачи с использованием системы координат и элементов внешнего ориентирования, принятых при воздушной стереофотосъемке, положительные направления координатных осей при съемках с высоких опор показаны на рис. 11- 13 настоящих Указаний.
При использовании системы координат и элементов ориентирования, принятой в случае наземной стереофотосъемки с высоких опор, удобно использовать следующие соотношения:
а) с ъемки с одной опоры при вертикальном базисе фотографирования
Xφ = ± Y г ; Yφ = ± X г ; Zφ = ± Z г ;
б) съемка с двух о по р п ри го ри зон тальном базисе фотографирования.
V . Вычисление геодезических координат определенных точек
Координаты определяемых точек находят по измеренным плоским координатам и полученным значениям ЭВО снимков в результате решения прямой фотограмметрической засечки. При этом используют формулы наземной (см. пп. 1.15- 1.16 Указаний) или воздушной стереофотосъемки :
 ,
,
где
x 0 i , y 0 i - координ аты точек левого снимка, трансформированные по известным формулам с использованием полученных угловых ЭВО;
p 0 i = x 0 i - x 01 i - продольный параллакс, а x 01 i - трансформированные координаты правого снимка.
Полученные таким образом координаты определяемых точек земной поверхности используют для составления крупномасштабных топографических планов пикетным способом или приводят в виде ведомости координат инженерных сооружений и других элементов исследуемого объекта.
Приложение 16
ВЕРТИКАЛЬНЫЕ ПРОЕКЦИИ РЕЛЬЕФА
1. Вертикальная про е кция (рис. 1, а) изображает рельеф в заданном масштабе фронталями, получающимися при сечении рельефа плоскостями, параллельными вертикальной плоскости проекции и имеющими заданный интервал сечения.
Вертикальные проекции повышают качество изображения рельефа труднодоступных обрывных участков и заменяют или дополняют малоэффективные в этих условиях планы в горизонталях. Применение вертикальных проекций рельефа создает предпосылки для более полной замены измерений на местности камеральной обработкой топографических материалов.
Для создания вертикальных проекций рельефа наиболее эффективна фототеодолитная съемка.
Вертикальная плоскость проекции в этом случае проходит через базис фотографирования, центром проекции является центр объектива фотокамеры на левом конце базиса.
На схеме вертикальной проекции обрывного участка (рис. 1, б) интервал сечения рельефа Δ Y принят равным 1 м. Чтобы на плане в горизонталях (рис. 1, а) заложения между изолиниями были не меньше, установлена высота сечения рельефа h = 5 м.
Представление о с те пени обобщения релье фа об ры вного участка на плане в гориз онта лях дает ри с. 1, г, где сплошной лин ией п оказа н попере чный профи ль по AB , составленный по пл а ну в гор из онталях, а п ункти рн ой - п остроенный по вертикальн ой п рое кции.
По ложение точек м ес тнос ти на ве рт ика льной прое кции определяется фотограм метричес ким и координатам и X и Z ( n ) координата с лужит д ля построения лин ий рав ных отстояний - ф ронт алей .
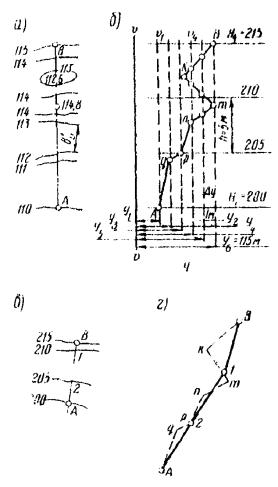
Рис. 1
2. Сво йс тва фронта лей (рис. 2) вытек аю т из определения ф ронталей как линий равных отстояний точек местности от ве рти кальной плос кости проекци и:
а) вс е точки S , лежащие на одной фронтали, одинаково удалены от вертикальной п лоскости проекций ( Ys = 1 21 м);
б) все ф ронтали в пределах данной проекции непрерывны;
в) при правильном выборе положения базис а ф ото гра фирован ия фронтали не пересекаются, их пересечение говорит о том, что одна форма рельефа зак рыв ает другую;
г) фр онта ли, изображающие равномерный слой (учас ток С), параллельны друг другу, их н аклон к горизон ту (угол γ) тем б ол ьше , чем больше угол β ме жду пл ос костью ската и верт ик альной п лоскостью проекции;
д) фрон тали , замыкающиеся в пре де лах чертеж а, обозначают или нависающий над об рыв ом в ыступ (точка N ), или западающую в о б ры в котловину (т очка K ). В ы ступ или впад ин а опоз на ются по отстояниям харак терных точек и близлежащих фронта лей;
е) V -образные фронтали об озн ачаю т лощи ну (л инии EF и ML - оси отлогов) и, наобор от, A -образные - хребет (лини и PQ - водораздельная линия , проходящ ая по хребту );
ж) водораздельные лини и оси лощин пересекаются фронталями под прямым углом (точка R );
з) как правило, точки, имеющие на проекции большие отсто я ния, имеют и большие отметки (исключение п. 5);
и) расстояния на пр оек ции между фронталями ( bv ) и и х ориен тиров ка ( углы γ) хар актериз уют крутизну ската.
При од инаковы х углах γ или при γ = 0 промежутки между фронталями тем больше, чем больше уго л наклона ската α , к горизонтальной п лоскос ти п рое кции (участок B к руче участк а A );
к) о п тима льной ориентировкой для вертикальной плоск ости проекции (базиса ф отографирования ) будет та, при кот орой заложения меж ду ф рон талями максимальны.
Рис. 2
3. При ра з бивке базисов фототеодолитной с ъем ки для созд ания вертикальных прое кций релье фа выполняются требования, изложенные выше.
При рек огн осци ровк е по ка рт ографи ческим мат ери алам мелкого масштаба плоскости проекций ориентируют так, чтобы направ лени я прости рания рельефа отдельных участк ов сос тав ляли с выбранным направлением возможно меньшие углы.
На местности базисы фотографирования разбивают ориентированными по участкам так же, как и выбранное направление плоскости проекции.
4. Вертикальные проекции ре ль ефа на существующих приборах создаются:
а) графоаналитически;
б) п ри п риб орах воз душной стереофотограмметрии (стереопланиграф и др.).
Г рафоаналитический сп осо б включае т с ледую щие э тапы :
а) на стереокомпараторе набл ю да ют все характ ерные точки обрыва и вычисляют их фотограмметрические координаты (п рил ожен ие 22);
б) п роекци и составляют на основе в виде сет ки кв адрато в (10×10 или 5× 5 см ). С помощью п алетки -к оордин ат омет ра или ос евого координатографа по ко ордин ат ам Xφ , Hφ ( Zφ ) харак т ерные точки показываю т на проекции и вы писыв ают отстояния Yφ ;
в) по характерн ым направлениям показывают линии интерпо ляции, на которы х о пределя ют положение промежуточных фронталей ;
г) точк и, и меющие одинаковые отстояния, соединяют линиями одноименных фрон талей.
П ри с оздании единой вертикаль ной проекции для участка, снятого с нескольких базисов, все координ аты точ ек вычисляют в системе координат крайнего левого базиса фотографирования.
На с те реок омпараторе можн о сраз у снять точки фрон талей.
Вертикальные проекции по мате ри алам фототеодолитной съемки наиболее эффективно строятся на стереоприборах воздушной сте ре офотог рамметрии, так как схема п ос трое ния фронт алей аналогична с хеме по строения по аэроснимкам гориз онталей. С т очки зрения фотогра мм етр ии обе изол ин ии являются линиями равных параллаксов.
Сни мки на стереоприборах ориентируются по контрольным точкам. На ст ере оп ланиг рафе нормал ьно ориен тиров анн ую модель создают обычными приемами, на оси стереопланиграфа включают как при обработке аэроснимков.
Сводку проекций, полученных на стереопланиграфе, подготавливают в процессе вычерчивания фронталей. Для первого левого базиса расчетное отстояние
Yp = Yφ - 0,5f.
Если данный базис отс тои т от левого край него базиса на величин у Δ Y , то
Yp = Yφ - 0,5f ± ΔY .
Построенные п роекц ии монти руют с учетом координа т цен тральных т очек отде льны х проекций.
Маршрутные базисы можно обрабатывать сразу на п риб оре сплошны м массивом, перемещением основы на столе координатографа в с оответств ии с координа там и X φ и Zφ ( Hφ ) центров отдельных прое к ций.
5. П р и проектировании трассы по вертикаль ной пр оекции рельефа решаю т с ледующие з адач и:
Определение координа т и вы сот точек . О тме тки точе к ме стнос ти оп реде ляют измерением в масштабе расстояний от гориз онтальны х лин ий координатн ой сетки до искомых точек. Если вертикальное расстояние ( nd ), измерен ное по проекции от точки n до гори з онтальной линии с отметк ой 250, равно 1 2,7 мм = 0,0127 м, от отметки
Hn = 259,00 - 0,0127 · 200 = 247,46 м .
А бс ци ссы соотв ет ств енн о определяют по расстояниям до точек от вертикальных линий координатной сетки. Для той же точк и n и з мерено гори зонтальн ое рас стоя ние СП = 6 мм; тогда
Xn = +40,00 + 0,006 · 200 = 41,20 м.
Составление продольных разрезов и проектирование трассы в плане . Укладка трассы по вертикальной проекции рельефа начинается с создания продольных разрезов. Если по данным предварительного проекта известны углы отклонения δ отдельных участков трассы от направления базиса фотографирования (плоскости проекции) уклон следа секущей плоскости
i раз = i тр secδ .
Положение первой точки продольного разреза определяется как в п. 28.
Когда положение следа секущей плоскости продольного разреза на проекции определено ( I - I на рис. 3, а и MN на рис. 4), строят разрезы. На горизонтальной прямой откладывают расстояния между точками пересечения секущей плоскости с фронталями и другими характерными точками (оси логов, хребты и т.д.), у точек выписывают их отстояния. На перпендикулярах, восстановленных из точек на прямой, откладывают в заданном масштабе MY отстояния. Полученные точки соединяют прямыми линиями. Построение продольного разреза можно ускорить, расположив его в проекционной связи с вертикальной проекцией, т.е. так, чтобы обе проекции на одной вертикали имели одинаковые абсциссы.
Рис . 3
На с оз да нных п родольных разрез ах - гориз онтальном на рис. 3 и наклонн ом на рис. 4 - укла дывают трасс у и в ып олняют п од готов ите льные работы для с ъемки поперечников.
Р ис. 4
По проекту пл а на лин ии и уклона м, приня тым при трас си рова нии, может быть построе на вертикальная проекция трассы. При этом вы числяют ся для п ря мых учас тков трассы отметки точе к на чала (Н К) и к он ца (КК ) кривы х, на кривы х дополните льно отметках середины крив ой (СК) (см. р ис. 4). По вычисленным отметкам точки трассы строя т на верти кальной проекции релье фа и сое диня ют пря мыми линия ми.
Со ставлени е попе речны х профи лей . Возмо жны три варианта расположе ния плоск ости п оперечного п роф иля относите льн о в ертикальной п лос кос ти проекции: плос кос ть поперечника перпе ндик уля рна плоскости проекции, па ралле льна плоск ос ти проек ции, имеет п рои звольну ю о рие нтировку.
В кажд ом случае ме тод ика съе мки профиля имее т свои особе нности.
Если плоско с ть попере чника перпендикулярна вертикальной п лоскости про екции, с лед секущей п лоскос ти на проекции - вертикальна я прямая линия ( AB н а рис. 4, а). При пост рое нии такого профил я на отдельном листе миллиметровой бумаги прочерчив ают вертикальную линию и отклады ва ют на н ей расстоя ния между фрон талями и хара кте рными точками. У точек выписы ва ют их отстояния, отложив которы е п олучают точ ки попе речного профиля (рис. 5).
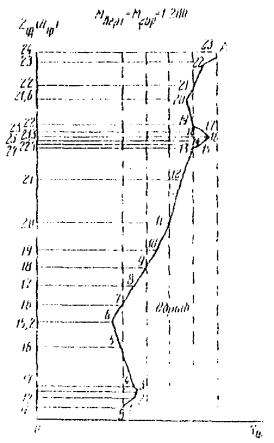
Рис . 5
П ри плос кос ти попе ре чника, пар аллель ной плоскости п роекции, изве стно отстояние Yn , п остоя нное д ля в се х точе к: если оно кра тно инте рва лу сечен ия фронта лей ΔY , то очертани е по перечн ика да ет ф ронта ль, имеющую то же отстоя ние. Для любых других зна чен ий Yn точки , поперечн ика опреде ляют по и нте рполя ции.
В общ ем случа е т расса отклонена от вертикальной пло скости проекции на угол δ.
Плоскость попереч н ика проекции составит при этом с плоско стью вертикальной пр ое кции угол β , равный
β = 90° - δ.
Го ризонтальны е с леды се кущих плоскосте й MN и PQ представлены на рис. 3 , б .
Точки про ф иля на ве ртикальной прое кции будут на ходиться на пересечении одн оиме нных фро нт алей секущей плоско сти и вертикальной плоскости пр оекции.
Заложение фронт алей секуще й п лос кос ти в масш табе ве ртик ал ьн ой п роек ции 1: m р а вн о
![]() .
.
Р асстояни е l ме ж ду точками искомого п рофи ля с отстояниями, кратными инт ерв алу сечений рельефа Δ Y , определяется по фор м уле
![]() .
.
Если го ризонтал ьный след поперечника и вертикальная проекция рельефа находятся в проекционной связи, профил ь строя т в следующем порядке.
На листе бумаги ( рис. 6) проводят ряд вертикальных линий. Расстояние между ними l равны вычисленным. Для попе ре чн ика пк 16+20 l 1 = ab = δb ..., для поп ере чн ика пк 16+38 расст ояние l 2 = a ′1 b ′ = b ′ c ′... .
Р ис . 6
Вертикальные линии откладывают вниз для точек, отстояния которых меньше отстояния точки пересечения горизонтального следа поперечника с линией продольного разреза .
Ос ь пу ти показывают в ерт икал ьной лини ей, отстояние кото рой соответствует отстоянию ос и на плане т рассы Y м = 123 ,7 м; Y 2 = 1 22, 3 м.
Из т очки п ерес ече ния следа поперечника и проекции ф ронт али (например, точки Л′, имеющей отстояние Y л = 127 м ) восст анав ливают п ерп ен дику ляр до пересечения в точке Л″ с одноименной фронталью на верт икаль но й прое кц ии рельефа. Затем цир кул ем -изм ерите лем бе рут расстоян ие от гор изонтальной линии I - I до получен н ой точки Л″ и откладывают на миллиметровой б ум аге от линии I - I на вертикали, имеющей то же отстояние Y л = 1 27 м .
Так им образом ст роят ост альны е точки п оперечника.
Составление продольного профиля по оси трассы . Продольные профили по оси пути с троя т та к же, как попе ре чные ( см. рис. 4).
Если трасса - п рямая линия, па ралле льн ая п лоскости проекции, продо льный профиль предс тав ля ет собой лин ию на п рое кции, отс тоя ния точек ко тор ой равны от стоян ию трассы (а″ ... д″) н а учас тке между точками М-Н, пол ученн ому по ин терп оляции.
Н а ве ртикальн ой п роекции опреде ля ют точки, имею щие отстояния, кратные ин те рвалу с ечения (точки З″, К″, М″ и Н″). Если п ос троенные точки не отражаю т все х пере ломов профиля, из характерны х мест изгибов фронталей, расположенных ме жду уже пол ученны ми точка ми, опускаю т перпендикуляры к трассе и оп ре деляют от стоя ния точе к трассы, соответствующие изгибам фронталей. Затем п ров еденны й перпендикуляр с ве рху о граничивае тся т очкой , интерполирова нное отс тоя ние к оторой равн о отст оянию точки тра ссы . Нап ример, по перпен дикуля ру, оп уще нном у из лога ( равн ой точки И″) опре делено, что точка трассы на этом изгибе имее т о тстояни е 120,6 м . Значит, окончательную точку И″ на до разместить на перпендикуляре, интерполируя между фронталями 120 и 121 м.
П одобным образом получены точки профиля Ж″ и Л″.
Продольный профиль (рис. 7) строится с ледующ им об ра зом. На пря мой откладывают расстояния с плана трассы а′б′, б′в′ ... М′Н′, а в соответствующих точках превышения над проектной линией - взятые с вертикальной п роекции рель ефа.
Ри с. 7
Помимо з адач, сопровождающих т расс ирование дорог, применение вертикальных прое кций рельефа рек ом ен дует ся:
- для под с чет а объемов рабо т по п оперечным п рофилям , отстояниям характерных точек пр оекции, а также для о бозн ачения границы земляных работ по к рас ным проект ам о тстояниям;
- п ри проектировании противообвальных сооружен ий и обрушения нависающих ча стей об рыв ов, подсчете проектных и фактических объемов при взрывах на сброс или обрушение;
- для инженерно-геологической характе ристики обн аж ений, вых одов пород, с бросов и других гео лог ич еск их явлений в районе трассы.
Приложение 17
СТРУБЦИНА ДЛЯ КРЕПЛЕНИЯ ФОТОТЕОДОЛИТА К ОПОРЕ
Скон с труирова нная и изг отовленн ая ЦНИИС ом струбцина (с м. рис ун ок ) предназначена для п ростран ственн ог о ориент ирова ния и крепления фототеодолита к любы м предм етам, ис польз уемым в качестве о поры для фотографирования.
С труб цин а сна бже на червячными шестернями с микрометренными винтами, позволяющ ими вращать и на клонять фотокаме ру в любых нап равления х.
Д оп олн ит ельное ориен тирующее устройс тво с трубцины поз воляет п ри производстве фотосъемки с точностью до 1° устанавливать з аданны е ве ли чины угловы х элементов внешнего ориентирования в пределах α = ±30°, ω = ±30°, x = ±90°. Д оп олн ительное устройство состоит из п одви жн ого уровня со шк алой угл ов в градусах , фиксирующего п ос ре дством пе реключающего устройс тва угловые элементы внешнего ориен тирования.
С труб цина сна бжен а та кже переходной втулкой, позволяющей исп ольз овать меха низ мы наклонов и пов оро тов при съе мке со станда ртны х ге одез ических штативов.
Оп ы тн о-прои зводств енные работы показали, что струбцина на дежно крепится к любым деталям с ооружений, используемы х в качестве оп оры, и позволяет умень шить вз аим ны е углы н аклонов и поворота сн имков с тереопары до 1-2°, благодаря чему каче ство стереоскопических наблюдений снимков значительно повышается.
Конструктивно с т рубцин а проста и не треб ует специа льны х юстировок.
ЛИТЕРАТУРА
1. Блохин Н.А. Стереофотограмметрическая наземная съемка. М., ОПТИ, 1937.
2. Коншин М.Д. Аэрофотограмметрия. М., «Недра» , 1 967.
3. Кирилленко В.С., Бруевич П.Н. Со с тав лен ие фронтальных планов и профиле й по материалам фототеодолитной съемки. М., «Недра», 19 76.
4. Лобанов А.Н. Фот ото пог раф ия. М., « Недра» , 1 968.
5. Панкратьев Ю.Н., Пузанов Б.С., Сердюков В.М. Инженерная ф от огр амметрия. Львов ский универ ситет, 1964.
6. Скиридов А.С. Сте реоф отог раммет рия . М., Ге одезиздат, 1959 .
7. Тру н ин А .П., Финаревский Н.Н., Чистяко в С.В. Фототео до литн ая съемка в крупны х мас шта бах. М., « Недра», 1 970.
СОДЕРЖАНИЕ
|
Предисловие . 1 I. Общие положения . 1 Системы координат и элементов ориентирования . 3 Рабочие формулы .. 3 Погрешности наземной стереофотосъемки . 9 II. Составление проекта выполнения наземной стереофотосъемки . 11 Аппаратура и оборудование для съемки и его подготовка . 15 III. Полевые работы .. 16 Рекогносцировка участков съемки . 17 Геодезические работы по обоснованию съемки . 22 Фотографирование местности . 24 Полевые фотолабораторные работы и анализ негативов . 27 Топографическое и инженерное дешифрирование снимков . 28 Полевая документация . 29 IV. Камеральная обработка материалов наземной стереофотосъемки . 30 Составление топографических планов оптико-механическим способом .. 30 Аналитическая обработка снимков с использованием ЭВМ .. 36 V. Использование материалов наземной стереофотосъемки при решении инженерных задач . 41 Измерения на стереомодели при изысканиях трасс на прижимных участках . 41 Составление фронтальных планов . 45 Определение объемов земляных работ . 48 Определение осадок и деформаций инженерных сооружений . 49 Приложение 1 Фототеодолитный комплект Photeo-19/1318 . 50 Приложение 2 Фототеодолитный комплект UMK 10/1318 . 57 Приложение 3 Индикатор прижима ЦНИИСа . 58 Приложение 4 Рекогносцировочный планшет . 60 Приложение 5 Журнал фототеодолитной съемки . 63 Приложение 6 Журнал полевой оценки качества негативов . 64 Приложение 7 Журнал анализа негативов . 64 Приложение 8 Ведомости дешифрирования . 65 Приложение 9 Ведомости геодезических координат опорной сети, базисных и контрольных пунктов . 65 Приложение 10 Ведомости контроля угловых элементов внешнего ориентирования . 66 Приложение 11 Стереокомпаратор Стеко . 66 Приложение 12 Стереоавтограф 1318 . 68 Приложение 13 Журнал обработки снимков на стереоавтографе . 76 Приложение 14 Методика аналитического сгущения опорной сети при стереофотосъемке протяженных косогоров . 76 Приложение 15 Методика аналитической обработки материалов неориентированной стереофотосъемки с использованием ЭВМ .. 81 Приложение 16 Вертикальные проекции рельефа . 83 Приложение 17 Струбцина для крепления фототеодолита к опоре . 91 |