МИ 222-80 Методика расчета метрологических характеристик измерительных каналов информационно-измерительных систем по метрологическим характеристикам компонентов
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО СТАНДАРТАМ
МЕТОДИКА РАСЧЕТА МЕТРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ КАНАЛОВ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫХ СИСТЕМ ПО МЕТРОЛОГИЧЕСКИМ ХАРАКТЕРИСТИКАМ КОМПОНЕНТОВ
МИ 222-80
Москва 1981
Содержание
|
1. МЕТРОЛОГИЧЕСКИЕ ХАРАКТЕРИСТИКИ, ПОДЛЕЖАЩИЕ РАСЧЕТУ 2. ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА MX ИК 3. РАСЧЕТ MX ИК ИИС В СТАТИЧЕСКОМ РЕЖИМЕ 4. РАСЧЕТ MX ИК ИИС В СТАЦИОНАРНОМ ДИНАМИЧЕСКОМ РЕЖИМЕ ПРИЛОЖЕНИЕ 1 Справочное ПРИЛОЖЕНИЕ 2 ФОРМУЛЫ РАСЧЕТА MX ИЗМЕРИТЕЛЬНЫХ КАНАЛОВ ИИС ПРИЛОЖЕНИЕ 3 МАТЕМАТИЧЕСКИЕ МОДЕЛИ СИ, СОСТАВЛЯЮЩИХ ИИС, И, ИХ MX ПРИЛОЖЕНИЕ 4 ПРИЛОЖЕНИЕ 5 Типовые структуры информационно-измерительных систем
|
РАЗРАБОТАНА:
Всесоюзным научно-исследовательским институтом метрологии измерительных и управляющих систем (ВНИИМИУС) научно-производственного объединения «Система»
Директор Е.Т. Удовиченко
Начальник отдела № 10 Э.С. Браилов
Руководитель темы В.Н Сиверс
Ответственные исполнители: Э.С. Браилов, Б.М. Ярошевич
Всесоюзным научно-исследовательским институтом электроизмерительных приборов (ВНИИЭП)
Директор В.Н. Иванов
Зав. отделом № 15 С.М. Мандельштам
Руководитель темы В.Н. Иванов
Ответственный исполнитель Н. А. Желудева
ПОДГОТОВЛЕНА К УТВЕРЖДЕНИЮ отделом № 11 Всесоюзного научно-исследовательского института метрологии измерительных и управляющих систем (ВНИИМИУС)
Начальник отдела № 11 Л.А. Коломийцев
Начальник сектора Б.Д. Колпак
УТВЕРЖДЕНА Научно-техническим советом Всесоюзного научно-исследовательского института метрологии измерительных и управляющих систем (ВНИИМИУС) 1 марта 1980 г. (протокол № 2/80).
Настоящая методика является основанием для составления частных методик расчетного определения метрологических характеристик ( MX ) измерительных каналов (ИК) конкретных ИИС по MX компонентов (см. приложение 1). Методика дает способы расчета значений MX ИК ИИС из числа регламентированных ГОСТ 8.009-72. Методика распространяется на ИК ИИС, которые составлены из последовательно включенных аналоговых компонентов с линейными функциями преобразования и нормированных MX (см. приложение 2), а также на ИК, содержащие дискретные компоненты, при условии, что погрешностью дискретности можно пренебречь, и устанавливает способы расчета MX ИК ИИС для статического, а также для динамического стационарного режимов измерения.
Примечания:
1. Динамическим является режим измерений изменяющейся во времени величины, при котором динамическая составляющая погрешности заметно влияет на общую погрешность измерений.
2. Стационарным является режим, при котором математическое ожидание и дисперсия измеряемого сигнала не зависят от времени, а корреляционная функция зависит от разности времен.
3. Статическим является режим измерений, при котором динамическая составляющая погрешности пренебрежимо мало влияет на общую погрешность измерении, а измеряемую величину можно считать неизменной во времени.
1. МЕТРОЛОГИЧЕСКИЕ ХАРАКТЕРИСТИКИ, ПОДЛЕЖАЩИЕ РАСЧЕТУ
1.1. Для нормальных условий эксплуатации ИИС в статическом режиме в настоящей методике представлены формулы расчета:
номинальной статической характеристики преобразования ИК ƒн(x)
систематической составляющей Δс погрешности ИК;
случайной составляющей ![]() погрешности ИК;
погрешности ИК;
погрешности Δ ИК.
1.2. Для рабочих условий эксплуатации ИИС в статическом режиме в настоящей методике представлены формулы расчета:
наибольших допускаемых изменений M Х ИК, вызванных изменениями внешних влияющих величин и неинформативных параметров входного сигнала, Δ l (ξ),
функции влияния па MX измерительных каналов ψ(ξ).
1.3. Для нормальных условий эксплуатации в стационарном динамическом режиме в настоящей методике представлены формулы расчета:
амплитудно- и фазочастотных характеристик ИК Ан(ω) и φн(ω);
спектральной плотности случайной составляющей погрешности ИК ![]() .
.
1.4. Для рабочих условий эксплуатации в стационарном динамическом режиме в настоящей методике представлены формулы расчета функции влияния на MX , перечисленные в п. 1.3.
2. ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА MX ИК
2.1. В качестве исходных данных в настоящей методике используются нормированные в соответствии с ГОСТ 8.009-72 MX компонентов, составляющих ИК.
2.1.1. В формулах расчета MX ИК в статическом режиме в нормальных условиях эксплуатации использованы следующие MX компонентов, составляющих ИК:
ƒн i (x) - номинальная статическая характеристика преобразования в виде формулы*;
* Здесь и далее индекс i - номер компонента.
характеристики систематической составляющей Δс погрешности:
М[Δс i(x)] - математическое ожидание систематической составляющей погрешности компонента в виде линейной функции входного сигнала;
σ[Δс i( x) ] - среднее квадратическое отклонение систематической составляющей погрешности компонентов данного типа в виде функции входного сигнала или Δс.д i = λ i - предел допускаемого значения систематической составляющей погрешности компонентов данного типа;
характеристика случайной составляющей ![]() погрешности σд i(
погрешности σд i( ![]() ) = æ i
) = æ i ![]() - предел
допускаемого значения среднего квадратического отклонения случайной
составляющей погрешности компонентов данного типа.
- предел
допускаемого значения среднего квадратического отклонения случайной
составляющей погрешности компонентов данного типа.
В расчетных формулах, полученных с учетом взаимного влияния каналов в многоканальных компонентах, входящих в состав ИИС, использованы следующие MX этих компонентов ИИС:
ƒн1(x), ƒн2(x), … - набор номинальных статических характеристик преобразования для каждого ИК каждого многоканального компонента, входящего в ИИС;
М( Δс1), М( Δс2) ,... - набор математических ожиданий систематических составляющих погрешности для каждого ИК каждого многоканального компонента, входящего в ИИС;
σ(Δс1), σ(Δс2) ,... - набор средних квадратических отклонений систематических составляющих погрешности для каждого ИК каждого многоканального компонента, входящего в ИИС.
2.1.2. В формулах расчета MX каналов в статическом режиме в рабочих условиях эксплуатации, кроме MX , указанных в п. 2.1.1, использованы следующие MX компонентов, составляющих ИК ИИС:
наибольшее допускаемое изменение MX , перечисленных в п. 2.1.1, вызванное изменением внешних влияющих величин и неинформативных параметров входного сигнала, или функции влияния на MX компонентов, перечисленные в п. 2.1.1, в виде зависимости от влияющих величин.
2.1.3. В стационарном динамическом режиме измерения в нормальных условиях эксплуатации исходными данными являются:
A н i (ω) - номинальная амплитудно-частотная характеристика (АЧХ) компонента, входящего в ИК;
φн i (ω) - номинальная фазочастотная характеристика (ФЧХ) компонента, входящего в ИК;
Δ Ai (ω) - наибольшее допускаемое отклонение АЧХ от номинального значения;
Δφ i (ω) - наибольшее допускаемое отклонение ФЧХ от номинального значения;
![]() - спектральная
плотность случайной составляющей погрешности компонента данного типа, входящего
в ИК.
- спектральная
плотность случайной составляющей погрешности компонента данного типа, входящего
в ИК.
2.1.4. В стационарном динамическом режиме измерения в рабочих условиях эксплуатации исходными данными наряду с характеристиками, указанными в п. 2.1.3 , являются:
ψΔ Ai (ξ1, ξ2, …) - функция влияния на АЧХ компонента, входящего в ИК;
ψΔφ i (ξ1, ξ2, …) - функция влияния на ФЧХ компонента, входящего в ИК;
![]() - функция влияния на спектральную плотность
случайной составляющей погрешности компонента, входящего в ИК.
- функция влияния на спектральную плотность
случайной составляющей погрешности компонента, входящего в ИК.
Примечание Характеристики, указанные в пп. 2.1.3 и 2.1.4, представлены в виде функции частоты (формулы, графика, таблицы).
2.2. Получение исходных данных для расчета.
2.2.1. MX компонентов, необходимые для расчета, следует брать из нормативно-технической документации.
2.2.2. В тех случаях, когда MX компонентов не заданы или представлены неполно, они должны быть определены путем экспериментального исследования компонентов с применением частных методик по определению MX компонентов.
Примечания:
1. Требования к виду задания ИХ компонентов, входящих в ИК, согласуются с видом математических моделей, описанных в приложении 3.
2. MX компонентов полагаются детерминированными величинами.
2.2.3. Форма задания исходных данных - абсолютная.
3. РАСЧЕТ MX ИК ИИС В СТАТИЧЕСКОМ РЕЖИМЕ
3.1. Расчет в номинальных условиях эксплуатации.
3.1.1. Номинальная статическая характеристика преобразования измерительного канала ƒн i (x) может быть рассчитана по формуле приложения 2, п. 1.
Исходными данными для расчета являются:
N - количество компонентов в канале;
ƒнi(x) - номинальные статические характеристики преобразования каждого компонента ( i = l , 2, ... N ). ƒнi(x) задается в виде линейных функций входного сигнала:
ƒн i (x) =Aix+ai,
где A i и ai мультипликативная и аддитивная составляющие номинального преобразования компонента соответственно.
3.1.2. Формулы расчета характеристики систематической составляющей погрешности ИК в виде функций входного сигнала приведены в приложении 2 , п. 2 .
Они дают возможность получить:
М [Δс( х) ] - математическое ожидание систематической составляющей погрешности ИК данного типа;
σ[Δ s( х) ] - среднее квадратическое отклонение систематической составляющей погрешности ИК данного типа.
Исходными данными для расчета являются:
N - количество компонентов в канале;
ƒн i( x) - номинальная статическая характеристика преобразования компонента данного типа в виде линейной зависимости от входного сигнала ( i =1,2, ... N ):
ƒн i (x) =Aix + ai;
М [Δс i( х) ] = Bix + bi - математическое ожидание систематической составляющей погрешности компонента данного типа в виде линейной функции входного сигнала;
σ[Δс i( x) ] - среднее квадратическое отклонение систематической составляющей погрешности компонентов данного типа (для всех компонентов), входящих в ИК, ( i = 1, 2, . . . , N ). Для расчета σ[Δс i( x) ] задается в виде функции входного сигнала х:
![]() ,
,
где G ![]() и
и ![]() - дисперсии мультипликативной
и аддитивной соcтавляющих систематической погрешности соответственно.
- дисперсии мультипликативной
и аддитивной соcтавляющих систематической погрешности соответственно.
3.1.3. Предел допускаемого значения систематической составляющей погрешности Δс.д ИК данного типа рассчитывается по формулам приложения 2 , п. 3 .
Результатом расчета является числовое значение Δс.д .
Взаимное влияние ИК не учитывается.
Исходными данными для расчета являются:
N - количество компонентов, входящих в ИК;
[0 ... q ] -диапазон изменения входного сигнала;
ƒн i( x) -номинальная статическая характеристика преобразования каждого компонента, входящего в ИК, ( i =1, 2, . . ., N ). ƒн i( x) задается в виде функции входного сигнала:
ƒн i (x) =Aix;
Δс.д i - предел допускаемого значения систематической составляющей погрешности компонента данного типа, входящего в ИК ( i = l ,2, ..., N ).
Для расчета используется числовое значение Δс.д i .
3.1.4. Расчет характеристики систематической и случайной составляющих погрешности с учетом связи между ИК распространяется на ИИС, составленные из многоканальных компонентов.
Рассчитываются следующие MX ИК ИИС:
М [Δс i( х) ] - математическое ожидание систематической составляющей погрешности ИК данного типа (для всех ИК ИИС i = 1, 2, . .. , m );
σ[Δс i( x) ] - среднее квадратическое отклонение систематической составляющей погрешности ИК данного типа (для всех ИК ИИС i = l , 2,....., m ).
Исходными данными для расчета являются:
m - количество ИК в многоканальных компонентах, входящих в ИИС;
N - количество компонентов, входящих в ИК;
ƒн ji( x) -номинальная характеристика преобразования по одному каналу j -го компонента, входящего в ИК ИИС ( j = 1, 2, ... , N ). ƒн ji( x) является линейной функцией входного сигнала i -г o канала компонента, входящего в ИИС:
ƒн ij (x) =Ajxi + aj при i =1,2,...,m; j=l,2,...,N;
М [Δс ji( х) ] -математическое ожидание систематической составляющей погрешности одного канала каждого компонента, входящего в ИК ИИС ( j =1, 2, . . . , N );
М [Δс ji( х) ] является линейной комбинацией всех входных сигналов компонента:
где i - номер какого-либо выделенного канала;
σ[Δс ij( x) ] - среднее квадратическое отклонение систематической составляющей погрешности по одному каналу каждого компонента ( j = 1,2,... N ). σ[Δс ij( x) ] является функцией всех входных сигналов компонентов хк. (к-1, 2, . . , m ):
где i - номер какого-нибудь выделяемого канала.
Расчетные формулы приведены в приложении 2, п. 4 .
Результатами расчета являются М( Δс i), σ(Δс i) , выраженные функциями от всех входных сигналов многоканальной ИИС.
3.1.5. Предел допускаемого значения среднего
квадратического отклонения случайной составляющей погрешности в ИК данного типа
σд( ![]() ) рассчитывается по
формулам приложения 2, п. 5.
) рассчитывается по
формулам приложения 2, п. 5.
Результатом расчета является числовое значение σд( ![]() ) .
) .
Взаимное влияние ИК не учитывается.
Исходными данными для расчета являются:
N - количество компонентов, входящих в ИК;
[0 ... q ] - диапазон изменения входного сигнала;
ƒн i( x) - номинальная статическая характеристика преобразования каждого компонента, входящего в ИК ( i = l , 2, ... N ). ƒн i( x) задается в виде функции входного сигнала:
ƒн i (x) = Aix;
Δс.д i - предел допускаемого значения систематической составляющей погрешности компонента данного типа, входящего в ИК ( i = 1, 2, ... N ). Для расчета используют числовое значение Δс.д i;
σд i( ![]() ) - предел
допускаемого значения среднего квадратического отклонения случайной
составляющей погрешности компонента данного типа, входящего в ИК ( i = 1,2, ... N ).
) - предел
допускаемого значения среднего квадратического отклонения случайной
составляющей погрешности компонента данного типа, входящего в ИК ( i = 1,2, ... N ).
3.1.6. Для расчета предела допускаемого значения погрешности Δд ИК в качестве исходных данных используют следующие характеристики:
N - количество компонентов в ИК;
[0... q ] - диапазон изменения входного сигнала;
ƒн i( x) - номинальную статическую характеристику преобразования (для всех компонентов, входящих в ИК):
ƒн i( x) = A i x
Δд i - предел допускаемого значения погрешности компонентов данного тина (для всех компонентов, входящих в ИК).
Примечание . Под
пределом допускаемой погрешности измерительного преобразователя понимается
наибольшее значение величины ![]() в диапазоне изменения входного сигнала (γ - постоянная
величина, зависящая от закона распределения вероятностей погрешности).
в диапазоне изменения входного сигнала (γ - постоянная
величина, зависящая от закона распределения вероятностей погрешности).
Вычисления проводятся по формулам, приведенным в приложении 2, п. 6.
Результатом расчета является числовое значение Δд.
3.2. Расчет MX ИК в статическом режиме в рабочих условиях эксплуатации.
3.2.1. Формулы расчета функций влияния на характеристики систематической составляющей погрешности ИК дают возможность получить:
ψ M (Δ c ) (ξ1, ξ2, …) - функцию влияния на М(Δ c ) ИК при совместном изменении влияющих величин;
ψσ(Δ c ) (ξ1, ξ2, …) - функцию влияния на σ(Δ c ) ИК при совместном изменении влияющих величин.
В набор влияющих величин (ξ1, ξ2, …, ξр) входят влияющие величины для каждого компонента, составляющего ИК. Взаимное влияние ИК не учитывается.
Исходными данными для расчета являются:
N - количество компонентов ИК, далее для каждого компонента, входящего в ИК, задаются: ƒн i( x), М [Δс i( х) ], σ[Δс i( x) ], в соответствии с п. 3.1.2.
Примечание . При расчете предполагается, что для каждого компонента, входящего в ИК, набор влияющих величин один и тот же.
ψ M (Δ ci ) (ξ1, ξ2, …) - функция влияния на M (Δс i ) при совместном изменении влияющих величин. Для расчета ψ M (Δ ci ) задается в виде функции (ξ1, ξ2, …, ξр):
ψ M(Δ ci) = αli(ξ1, ξ2, …, ξр) + α2 i(ξ1, ξ2, …, ξр) x,
где х - информативный параметр входного сигнала;
αli(ξ1, ξ2, …, ξр), α2 i(ξ1, ξ2, …, ξр) - функции влияющих величин;
ψ σ(Δ ci)(ξ1, ξ2, …, ξр) - функция влияния на σ(Δ ci) при совместном изменении влияющих величин.
Для расчета ψ σ(Δ ci)(ξ1, ξ2, …, ξр) задается в виде функции влияющих величин:
ψ σ(Δ ci)(ξ1,
ξ2, …, ξр)= [ ![]() (ξ1, ξ2, …, ξр)
+
(ξ1, ξ2, …, ξр)
+ ![]() (ξ1, ξ2, …, ξр) x2]1/2,
(ξ1, ξ2, …, ξр) x2]1/2,
где ![]() (ξ1, ξ2, …, ξр),
(ξ1, ξ2, …, ξр),
![]() (ξ1, ξ2, …, ξр) - функции влияющих величин. Вычисления
проводят по формулам, приведенным в приложении 2, п. 7.
(ξ1, ξ2, …, ξр) - функции влияющих величин. Вычисления
проводят по формулам, приведенным в приложении 2, п. 7.
3.2.2. Наибольшее допускаемое изменение Δс.д ИК рассчитывается по формулам приложения 2, п. 8.
Результатом расчета является ΔΔс.д, выраженная в единицах Δс.д.
Взаимное влияние ИК не учитывается.
Исходными данными для расчета являются:
N - количество компонентов в ИК;
[0... q ] -диапазон изменения информативного параметра входного сигнала.
Далее для каждого компонента, входящего в ИК, задаются:
ƒн i (x) = Aix;
p - количество влияющих величин;
ΔΔс.д i - наибольшее допускаемое изменение Δс.д i , ΔΔс.д i выражается в единицах Δс.д i :
ΔΔс.д i = К i Δс.д i; К i> 0.
3.2.3. Наибольшее допускаемое
изменение σд( ![]() ) ИК рассчитывается по формулам приложения 2,
п. 9.
) ИК рассчитывается по формулам приложения 2,
п. 9.
Результатом расчета является Δσд ( ![]() )(ξ1, …, ξр) , выраженное в единицах σд(
)(ξ1, …, ξр) , выраженное в единицах σд( ![]() ) .
) .
Взаимное влияние ИК не учитывается.
Исходными данными для расчета являются:
N - количество компонентов в ИК;
[0… q ]-диапазон изменения информативного параметра входного сигнала.
Далее для каждого компонента, входящего в ИК, задаются:
ƒн i (x) = Aix;
Δс .д i = λ i ;
σд i ( ![]() ) = æi;
) = æi;
ΔΔс .д i (ξ 1 , ξ 2 , …, ξр ) = К iλ i ;
Δ σд i( ![]() )(ξ1, ξ2, …) - наибольшее допускаемое изменение σд i(
)(ξ1, ξ2, …) - наибольшее допускаемое изменение σд i( ![]() ) при совместном
изменении влияющих величин. Δ σд i(
) при совместном
изменении влияющих величин. Δ σд i( ![]() ) выражается в
единицах σд i(
) выражается в
единицах σд i( ![]() ) :
) :
Δσд i( ![]() )(ξ1, ξ2, …, ξр)= li æ i;
li>0.
)(ξ1, ξ2, …, ξр)= li æ i;
li>0.
3.2.4. Наибольшее допускаемое изменение Δд ИК при совместном изменении влияющих величин ΔΔд(ξ1, ξ2, …, ξр) рассчитывается по формулам приложения 2, п. 10.
Результатом расчета является ΔΔд , выраженное в единицах Δд ,.
Взаимное влияние ИК не учитывается.
Исходными данными для расчета являются:
N - количество компонентов в ИК;
[0... q ] -диапазон изменения информативного параметра входного сигнала.
Далее для каждого компонента, входящего в ИК, задаются:
ƒн i (x) = Aix;
Δд i = δi.
4. РАСЧЕТ MX ИК ИИС В СТАЦИОНАРНОМ ДИНАМИЧЕСКОМ РЕЖИМЕ
4.1. Расчет MX измерительных каналов в стационарном динамическом режиме в нормальных условиях эксплуатации .
По формулам приложения 2, п. 11 можно рассчитать следующие MX ИК ИИС:
А н (ω) - номинальную АЧХ ИК данного типа;
φн(ω) - номинальную ФЧХ ИК данного типа;
Δ А (ω) - наибольшее допускаемое отклонение АЧХ от номинальной АЧХ ИК данного типа;
Δ φ(ω) - наибольшее допускаемое отклонение ФЧХ от номинальной ФЧХ ИК данного типа;
Ѕ ![]() (ω)
-спектральную плотность случайной составляющей погрешности ИК данного типа.
(ω)
-спектральную плотность случайной составляющей погрешности ИК данного типа.
Результатом расчета являются перечисленные MX , выраженные в виде функций частоты.
Исходными данными для расчета являются:
N - количество компонентов, входящих в ИК;
А н i (ω) - номинальная АЧХ каждого компонента, входящего в ИК;
φн i (ω) - номинальная ФЧХ каждого компонента, входящего в ИК;
Δ А i (ω) - наибольшее допускаемое отклонение АЧХ от номинальной АЧХ компонента данного типа, входящего в ИК;
Δ φ i (ω) - наибольшее допускаемое отклонение ФЧХ от номинальной ФЧХ компонента данного типа, входящего в ИК;
Ѕ ![]() (ω) -
спектральная плотность случайной составляющей погрешности компонента данного
типа, входящего в ИК.
(ω) -
спектральная плотность случайной составляющей погрешности компонента данного
типа, входящего в ИК.
4.2. Расчет MX измерительных каналов в стационарном динамическом режиме в рабочих условиях эксплуатации.
По формулам приложения 2, п. 12 можно рассчитать следующие MX измерительных каналов ИИС:
ΨΔ А(ξ1, ξ2, …, ξр) - функцию влияния на Δ А (ω) при совместном изменении влияющих величин;
ΨΔ φ(ξ1, ξ2, …, ξр) - функцию влияния на Δ φ(ω) при совместном изменении влияющих величин;
ΨЅ ![]() (ξ1, ξ2, …,
ξр) -функцию
влияния на Ѕ
(ξ1, ξ2, …,
ξр) -функцию
влияния на Ѕ ![]() (ω) при совместном изменении влияющих величин.
(ω) при совместном изменении влияющих величин.
Исходными данными для расчета являются:
исходные данные, указанные в п. 4. l, а также р - количество влияющих величин;
ΨΔ А i(ξ1, ξ2, …, ξр) - функция влияния на Δ А i (ω) компонента, входящего в ИК;
ΨΔ φ i(ξ1, ξ2, …, ξр) - функция влияния на Δ φ i (ω) компонента, входящего в ИК;
ΨЅ ![]() (ξ1, ξ2, …,
ξр) - функция
влияния на Ѕ
(ξ1, ξ2, …,
ξр) - функция
влияния на Ѕ ![]() (ω) компонента, входящего в ИК.
(ω) компонента, входящего в ИК.
Примечание . Предполагается, что количество влияющих величин для каждого компонента, входящего в ИК, одинаково.
Результатом расчета являются перечисленные функции влияния, выраженные функциями влияющих величин.
ПРИЛОЖЕНИЕ 1
Справочное
Информационно-измерительная система (ИИС) - совокупность первичных устройств, комплексов агрегатных средств измерений и вспомогательных технических устройств, функционально объединенных в измерительный канал постоянной или переменной структуры, поставляющая потребителю информацию в соответствии с ее назначением.
Примечание . Любая ИИС, вне зависимости от конкретного назначения, состоит из трех основных частей: первичного устройства, предназначенного для восприятия, сбора, подготовки и передачи измерительной информации; линий связи - проводных и беспроводных; комплекса агрегатных средств.
Измерительный канал (ИК) - функционально объединенная совокупность средств измерений, по которому проходит один последовательно преобразуемый сигнал.
Примечание . В состав измерительного канала могут входить измерительные преобразователи, мера, измерительный прибор, а также объединяющие их элементы, в частности, линии связи. Измерительные каналы могут использоваться как по отдельности, так и входить в состав измерительных систем.
Измерительный канал измерительного компонента - часть измерительного компонента ИИС, имеющего несколько входов, выполняющая законченное измерительное преобразование, составляющее функцию этого компонента от одного из его входов до его выхода.
Измерительный компонент, входящий в ИИС - измерительный прибор или измерительный преобразователь (в том числе устройство согласования сигналов), мера, измерительный коммутатор, линия связи или их конструктивно объединенная или территориально локализованная совокупность, составляющая часть ИИС.
ПРИЛОЖЕНИЕ 2
ФОРМУЛЫ РАСЧЕТА MX ИЗМЕРИТЕЛЬНЫХ КАНАЛОВ ИИС
1. Расчет ƒн( x) .
Исходные данные из п. 3.1 подставляем в следующие формулы:
![]() при i =1,2,...., N-1;
при i =1,2,...., N-1;
AN = 1;
![]() .
.
Затем вычисляем
ƒн (x) =A°x + a.
2. Расчет М[ Δ с (х)], σ [Δ с (х)].
На основании исходных данных из п. 3.1.2 вычисляем вспомогательные величины:
В i= ![]() (Вк+Ак) при i=0,1,..., N-1;
(Вк+Ак) при i=0,1,..., N-1;
Q ![]() =
= ![]() [(Вк +Ак )2+G
[(Вк +Ак )2+G ![]() при i =0,1,...,N-1;
при i =0,1,...,N-1;
BN =AN= ![]() =1;
=1;
Ai= ![]() Ак при i=0,1,..., N-1;
Ак при i=0,1,..., N-1;
b = ![]() -
- ![]() ;
;
B=B˚- A˚.
Подставляем их в следующие формулы:
М[Δс(х)]= Bx+ b
σ[Δс(х)]=< x2[ Q ![]() -( B˚)2]+
-( B˚)2]+ ![]() >1/2.
>1/2.
3. Расчет Δ с.д .
Используем исходные данные п. 3.1.3 для вычисления вспомогательных величин; обозначим λ i = Δ с.д i , q 1 = q , тогда:
qi = qi-1Ai-1 при i =2,3,...,N;
BN =1; Bi-1=Bi(Ai+2λ i /qi) при i =2,3,...,N-1.
Затем вычисляем
![]() .
.
4. Для вычисления М(Δс i) и σ(Δс i) используем исходные данные п. 3.1.4.
Обозначим:
y oi = xi - входной сигнал i -го канала компонента.
Вычислим вспомогательные величины:
![]() при s = 1,2,...,N;
при s = 1,2,...,N;
![]() при s =2,3,...,.N,
при s =2,3,...,.N,
где Aiis =Ais; Aк is = 0 при k ≠ i
ysi имеет смысл математического ожидания выходного сигнала i -г o канала s -г o блока.
Дальнейшие вычисления проводят по формулам:
![]()
σ(Δс .i ) = σNi(Δс ).
5. Расчет σд( ![]() ).
).
Для вычисления σд( ![]() ) ИК используем
исходные данные п. 3.1.4.
) ИК используем
исходные данные п. 3.1.4.
Обозначим
q1 = q;
λ i = Δс.д i;
![]() при i =1,2,…,N.
при i =1,2,…,N.
Вычислим вспомогательные величины:
qi = qi-1 Ai-1 при i = 2,3, ...,N;
BN = SN = 1;
В i-1 = В i (А i + ![]() ) при i = 1 ,2, . .N;
) при i = 1 ,2, . .N;
 при i = 1 ,2, . .N;
при i = 1 ,2, . .N;
Ci,i+1=1;
 при j > i+1.
при j > i+1.
Затем вычислим

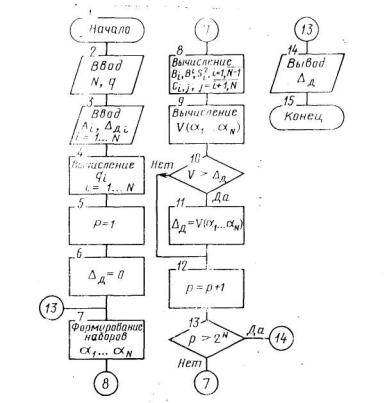
6. Расчет Δд.
Для вычисления Δд используем исходные данные п. 3.1.6.
Введем обозначения:
![]() i = αiδi ;
i = αiδi ;
![]() при i = 1 ,2, . .N.
при i = 1 ,2, . .N.
Здесь ![]() - параметр перебора,
который при каждом i=
1 ,2, . . N принимает значения 0 или 1.
- параметр перебора,
который при каждом i=
1 ,2, . . N принимает значения 0 или 1.
Вычислим по формулам приложения 3, п. 3
вспомогательные величины Bi , В i , ![]() , С ij , qi .
, С ij , qi .
Введем функцию V (α1, α2, …, α N ) от величины α i :

Расчет Δд соответствует задаче поиска max V(α1, …, α N) при условии, что α i может принимать одно из двух значений α i =0 или α i =1.
Например, при N = 3 необходимо вычислить восемь значений V (0, 0, 0), V (0, 0, 1), V (0, 1, 0), V (1, 0, 0), V (1, 0, 1), V (0, 1, 1), V (1, 1, 0), V (1, 1, 1) и выбрать наибольшее из них.
7. Расчет ψ M (Δ c ) (ξ1, ξ2, …, ξ p ); ψ σ (Δ c ) (ξ1, ξ2, …, ξ p ).
Для вычисления функций влияния используем исходные данные п. 3.2.1.
Вычислим вспомогательные величины:
Biξ=Bi+α2i(ξ 1 , …, ξ p ); biξ=bi+α1i(ξ 1 , …, ξ p ); ![]() ;
; ![]() .
.
Подставив их в формулы приложения 2, п. 2, вычислим ![]() при i = l ,
2, .... N .
при i = l ,
2, .... N .
Эти величины используем для вычисления М[Δс(х)] и
подставим их в формулы приложения 3, п. 2
вместо R , ![]() , b .
, b .
Затем по формулам приложения 2, п. 2 вычислим ![]() и
и ![]() .
.
Затем вычислим искомые функции влияния:
ψ M(Δ c) (ξ1,
ξ2, …, ξ p) = ![]() -
- ![]() ;
;
ψ σ(Δ c) (ξ1,
…, ξ p)
= ![]() -
- ![]() .
.
8. Расчет ΔΔс.д.
Для расчета используют исходные данные п. 3.2.2. Вычислим вспомогательные величины λ iξ при i = 1, 2, ..., N:
λ iξ = (1+ Ki) λ i.
По формулам приложения 2, п. 3 вычислим Δс.д . Используя λ iξ вместо λ i по формулам приложения 2, п. 3 вычислим Δс.д(ξ1, …, ξ p) . Требуемую характеристику находят по формуле
ΔΔс.д(ξ1, …, ξ p) = KΔс.д,
где K = (Δс.д(ξ1, …, ξ p))/ Δс.д .
9. Расчет Δд( ![]() )(ξ1, …, ξ p).
)(ξ1, …, ξ p).
Для расчета используют исходные данные п. 3.2.3.
Вычислим вспомогательные величины λ iξ , χiξ :
λ iξ = (1+ Ki) λ i;
χ iξ = (1+ li) χ i.
По формулам п. 3.1.5
вычислим σд( ![]() ) . Используя λ iξ, χ iξ вместо λ i и χ i , по формулам приложения 3 п.5,
вычислим σдξ(
) . Используя λ iξ, χ iξ вместо λ i и χ i , по формулам приложения 3 п.5,
вычислим σдξ( ![]() ) .
) .
Искомую характеристику находят по формуле
Δσд( ![]() )(ξ1, …, ξ p)= l σд(
)(ξ1, …, ξ p)= l σд( ![]() ),
),
где l = [ σдξ( ![]() ) -σд(
) -σд( ![]() ) ]/σд(
) ]/σд( ![]() ) .
) .
10. Расчет ΔΔд(ξ1, …, ξ p).
Для расчета используют исходные данные п. 3.2.4.
Вычислим вспомогательные величины δ i ξ
δ iξ =(1+ ri) δ i.
По формулам приложения 2 п. 6 вычислим Δд . Используя δ i ξ вместо δ i , вычислим Δдξ по формулам приложения 2 п. 6.
Искомую характеристику находим по формуле
ΔΔд = rΔд,
где r = (Δдξ - Δд )/ Δд .
11. Расчет MX ИК в стационарном динамическом режиме в нормальных условиях.
Для расчета используют исходные данные п. 4.1. Номинальную АЧХ ИК и наибольшее допустимое отклонение от нее рассчитывают по формулам
![]()
![]()
Номинальную ФЧХ ИК и наибольшее допустимое отклонение от нее рассчитывают по формулам
![]() ;
;
![]() .
.
Спектральную плотность случайной составляющей ИК рассчитывают по формуле
![]() .
.
12. Расчет MX ИК в стационарном динамическом режиме в рабочих условиях эксплуатации.
Для расчета используют исходные данные пп. 4.1 и 4.2.
Рассчитывают вспомогательные величины Δ A ξ (ω), Δφξ(ω),
S ![]() :
:
![]() ;
;
![]() ;
;
 .
.
Используя данные приложения 2, п. 11,
находят функции влияния ![]() ,
, ![]() ,
, ![]() :
:
![]() = ΔAξ( ω) - ΔA( ω) ;
= ΔAξ( ω) - ΔA( ω) ;
![]() = Δφξ( ω) - Δφ( ω);
= Δφξ( ω) - Δφ( ω);
![]() =S
=S ![]() (ω)
- S
(ω)
- S ![]() (ω).
(ω).
Примечание к п.7. Для наиболее сложного алгоритма расчета Δд приведена блок-схема. Программа составляется в зависимости от типа используемой ЭВМ.
ПРИЛОЖЕНИЕ 3
МАТЕМАТИЧЕСКИЕ МОДЕЛИ СИ, СОСТАВЛЯЮЩИХ ИИС, И, ИХ MX
1. Идеальное требуемое преобразование входного сигнала по различным каналам компонентов происходит независимо.
Модель канала идеального СИ описывается линейным стационарным оператором:
где ![]() -идеальный выходной сигнал;
-идеальный выходной сигнал; ![]() -идеальная весовая функция блока;
-идеальная весовая функция блока; ![]() - входной сигнал.
- входной сигнал.
Реальное преобразование (без учета взаимного влияния каналов) также описывается линейным стационарным оператором:
где ![]() - реальный сигнал на
выходе блока;
- реальный сигнал на
выходе блока; ![]() - реальная весовая
функция;
- реальная весовая
функция; ![]() - стационарный
случайный эргодический процесс, описывающий аддитивную составляющую выходного
сигнала.
- стационарный
случайный эргодический процесс, описывающий аддитивную составляющую выходного
сигнала.
Погрешность преобразования ε( t )= yp ( t ) - y и ( t ) является стационарным случайным эргодическим процессом.
В статическом режиме работы СИ модель канала упрощается:
yи = Ах + а;
y p = Арх + ар,
где A , a - постоянные числа, мультипликативная и аддитивная составляющие идеального преобразования соответственно. Ар, ар - случайные величины, мультипликативная и аддитивная составляющие реального преобразования соответственно.
Погрешность преобразования ε = y p - yи является случайной величиной.
В статическом режиме с учетом взаимного влияния каналов в блоке выходной сигнал блока
![]()
![]()
где ![]() и
и ![]() - векторы выходных и входных сигналов соответственно (размеры
векторов
- векторы выходных и входных сигналов соответственно (размеры
векторов ![]() и
и ![]() равны количеству
каналов блока m);
Ар- случайная матрица, элемент Ар, ij соответствует
преобразованию сигнала х i на i-м
входе в сигнал ур, j на j - м
выходе;
равны количеству
каналов блока m);
Ар- случайная матрица, элемент Ар, ij соответствует
преобразованию сигнала х i на i-м
входе в сигнал ур, j на j - м
выходе; ![]() - вектор аддитивных
составляющих на выходе блока.
- вектор аддитивных
составляющих на выходе блока.
При использовании такой модели сигнал на j-м выходе блока
![]()
Погрешность преобразования по j -му каналу
![]() ,
,
где Aj - мультипликативная составляющая идеального оператора j -го канала компонента.
В дальнейшем считаем Ар, ij и Ар, ts некоррелированными случайными величинами, кроме случая совпадения индексов; ар, i и ар, j некоррелированы при i ¹ j ; Ар, ii и ар, i - коррелированы.
2. Выбор математической модели компонентов, входящих в состав ИИС, определяет вид задания MX этих СИ. Вид задания MX должен позволить определить параметры модели. Используя модель приложения 3, п. 1, получаем выражения для MX компонентов,
В статическом режиме для одноканального компонента. Δс - систематическая составляющая погрешности - является линейной функцией входного сигнала:
![]()
где ![]() - математические ожидания
мультипликативной и аддитивной составляющих погрешности соответственно; А,
а - мультипликативная и аддитивная составляющие идеального оператора
соответственна.
- математические ожидания
мультипликативной и аддитивной составляющих погрешности соответственно; А,
а - мультипликативная и аддитивная составляющие идеального оператора
соответственна.
Дисперсия случайной составляющей погрешности ![]() - полином второй степени относительно входного сигнала
- полином второй степени относительно входного сигнала
![]()
где ![]() - дисперсии
мультипликативной и аддитивной составляющих погрешности соответственно; R - коэффициент корреляции между ними.
- дисперсии
мультипликативной и аддитивной составляющих погрешности соответственно; R - коэффициент корреляции между ними.
Среднее квадратическое
отклонение случайной составляющей погрешности ![]() компонента имеет вид:
компонента имеет вид:
![]()
Предполагая наличие типового разброса параметров компонента, получим их типовые MX :
![]()
![]()
Примечание . Последнее
выражение получено в предположении о независимости ![]() .
.
![]()
3. Систематическая составляющая погрешности преобразования по j -му каналу многоканального компонента выражается следующим образом:
![]()
Математическое ожидание по типу
![]()
Дисперсия Δс j равна
![]()
Такой моделью может быть описано СИ со многими входами и одним выходом, при условии, что каналы компонента опрашиваются не одновременно.
Например, рассмотрим коммутатор с m входами.
Погрешность при опросе j -го канала выражается следующим образом через параметры коммутатора и входные сигналы каналов:

где Uj -входной сигнал j -го канала; r д i - выходное сопротивление датчика в i -м канале; R пр j - сопротивление открытого ключа при прямом токе; R обр j - сопротивление разомкнутого ключа при обратном токе; U о j - остаточное напряжение; I о i - ток утечки закрытого канала; R вх - входное сопротивление следующего блока;
![]()
Предполагая идеальное согласование блоков в ИИС, имеем r д i = 0; R вх = ¥ .
Считаем, что R пр i << R обр i .
Тогда выражение для погрешности коммутатора принимает вид
![]()
Систематическая составляющая Δс j получается при усреднении характеристик компонента:

С учетом типового разброса ИК вычисляем М(Δс j ), которое имеет вид, аналогичный описанному в приложении 2, п. 8.
![]()

![]()
ПРИЛОЖЕНИЕ 4
1. Расчет математического ожидания систематической составляющей погрешности М[Δс( x )].
В данном пункте приводится пример расчета М[Δс( x )] ИК устройства связи с объектом (УСО) управляющего вычислительного комплекса (УВК), построенного на базе процессора М-6000 АСВТ-М.
Структурная схема ИК УСО представлена на рис. 1, где БН - блок нормализации, осуществляющий преобразование сигнала от объекта в электрический сигнал; УСНУ - усилитель сигналов низкого уровня; АЦП - аналого-цифровой преобразователь; K 1 , К2 - ключи коммутаторов первой и второй ступени соответственно.

Рис. 1
Блок нормализации БН-12А входит в состав модуля нормализации А613-2 и предназначен для преобразования сигналов датчика (в данном случае величины изменения сопротивления термометра сопротивления) в унифицированный электрический сигнал постоянного напряжения 0-50 мВ. Входной диапазон БН-12А от 0 до 33 Ом. Номинальная статическая характеристика преобразования имеет вид
![]()
где а1 = 0; А1= 30/33 = 1,516 мВ/Ом.
Усилитель сигналов низкого уровня А613-1 является групповым блоком для 16 каналов и предназначен для преобразования сигналов постоянного напряжения 0-50 мВ с выходов нормализаторов в сигнал постоянного напряжения высокого уровня 0-5 В. Номинальная статическая характеристика преобразователя усилителя имеет вид
![]()
где а2 = 0; А2= 5000 мВ/50 мВ = 100.
Аналого-цифровой преобразователь А611-4 предназначен для преобразования аналоговых сигналов, поступающих с выхода усилителя А613-1, в цифровой код. Номинальная статическая характеристика АЦП, В, имеет вид
х = 2,44·10-3 у,
где у - выходной код преобразователя.
Режим работы УСО статический,
Номинальные статические характеристики преобразования перечисленных блоков задают требуемое преобразование.
Ввиду того, что для компонентов УСО отсутствовали сведения о М[Δс( x )], были проведены экспериментальные работы по определению необходимых MX данных компонентов. Оценка этих характеристик проводилась в соответствии с методикой РТМ 25.159-714.
Исследование характеристики погрешностей коммутаторов А612-5 (К1) и А612-9(К2) показало, что погрешности, вносимые ключами K 1 и K 2 , пренебрежимо малы по сравнению с погрешностями остальных блоков Поэтому для цепей расчета ключи K 1 и K 2 можно считать идеальными коммутаторами и полагать, для них М[Δс( x )] = 0.
Полученные характеристики, представленные в таб. 1, являются исходными данными для расчета М[Δс( x )] УСО по формулам приложения 2, п 2.
Таблица 1
|
Пимер компонента |
Параметры |
|||
|
А , мВ/°С |
а |
В |
b , В |
|
|
1 |
1,515 |
0 |
0 |
0,67·10-5 |
|
2 |
100 |
0 |
-0,038 |
0 |
|
3 |
1 |
0 |
-0,00173 |
2,25·10-3 |
Вычислим по формулам приложения 2, п 2:
В 2 = 0,99877 В; В1 = 99,962·0,99877 = 99,839; В0 = 1,515·99,962·0,94877 = 151,2561; A 0 = 1,515·100 = 151,5; b = 2,25·10-3 + 0,67·10-5; В1 = (2,25 + 0,66) ·10-3 = 2,91 мВ.
Окончательно, подставляя в формулу М[Δс( x)] = (В0 - А0) x + b - а, имеем М[Δс( x)] = 0,248 + 2,91 мВ.
2. Расчет предела допускаемого значения погрешности Δд
В данном пункте приводится пример расчета измерительного канала ИВК-7.
Структурная схема ИК представлена на рис. 2, где У - усилитель Ф799/4; К - коммутатор Ф799/2; Д - делитель напряжения; АЦП - аналого-цифровой преобразователь Ф41221.
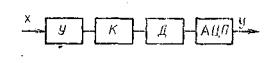
Рис. 2
Компоненты измерительного канала входят в состав агрегатного комплекса средств электроизмерительной техники (АСЭТ).
Усилитель Ф799/4 предназначен для усиления от 0-10 мВ до уровня сигнала 0-10 В.
Поминальная статическая характеристика усилителя имеет вид
![]()
где A 1 = 10000 мВ/10 мВ = 1000.
Коммутатор Ф799/1 коммутирует сигналы 0-10 В. Номинальная статическая характеристика преобразования имеет вид
![]()
где A 2 = 1.
Делитель предназначен для преобразования сигнала с выхода коммутатора 0-10 В до уровня 0- l В.
Номинальная статическая характеристика преобразования делителя имеет вид
![]()
АЦП Ф4221. Принимаем номинальную характеристику преобразования АЦП
![]()
так как погрешность ИК будет в дальнейшем приводить ко входу АЦП. Режим работы канала статический.
Кроме перечисленных характеристик, использовались характеристики погрешности, взятые из паспортов приборов.
Усилитель Ф799/4. Нормированная основная приведенная погрешность составляет 0,1 %. Тогда Δд1 = 0,1·100-2·10000 мВ = 10 мВ.
Коммутатор Э799/2. Нормированная приведенная погрешность составляет 0,1 %. Тогда Δд2 =0,1·100-2·10000 мВ = 10 мВ.
Делитель имеет погрешность намного меньше погрешностей остальных компонентов, поэтому считаем Δд3 = 0.
АЦП Ф4221. Нормированная основная приведенная погрешность составляет 0,2 %. Δд4 = 0,2·100-2·1000 мВ = 2 мВ.
Полученные характеристики, представленные в табл. 2, являются исходными данными для расчета.
Таблица 2
|
Номер компонента |
Характеристика |
||
|
А i |
Δд i , мВ |
Входной диапазон q , В |
|
|
1 |
1000 |
10 |
0 ... 10·10-3 |
|
2 |
1 |
10 |
0 ... 10 |
|
3 |
1 |
0 |
0 ... 10 |
|
4 |
1 |
2 |
0 ... 1 |
Вычислим:
q2 = 10 мВ·1000 = 10000 мВ; q3 = l0000 мВ; q4 = 10000 мВ;
В1 =1000+2а110/10 = 1000+2а2; В2 = 1 + 2а210/100000= 1 + 2а210-4;
В3 = 1; В4 = 1 + 2а42/1000 = 1 + 4·10-3а4; В4 = 1;
В3 = 1 + 4·10-3а4; В2 = В3; В1 = В2 (1 + 2а210-4);
В0 = (1 + 4а2 l0-3)·( l + 2а2 l0-4) ·1000 + 2а1); C12 = l; C23 = l;
C 34 = l; C13 = l + 2·10-4a2;
C14= 1 + 2a410-4; C24
= l; ![]()
![]()
![]()
![]()
Учитывая, что а i £ 1, в полученных выражениях пренебрегаем членами порядка 10-6. В результате получим:
![]()
![]()
Составим функцию
Вычисляя V ( a 1 , ... , a 4 ) для всевозможных комбинаций a 1 , a 2 , a 3 , a 4 и сравнивая их, находим max V ( a 1 , a 2 , a 3 , a 4 ) = 4,01 мВ, при этом a 1 = a 2 = a 4 =1.
ПРИЛОЖЕНИЕ 5
Типовые структуры информационно-измерительных систем
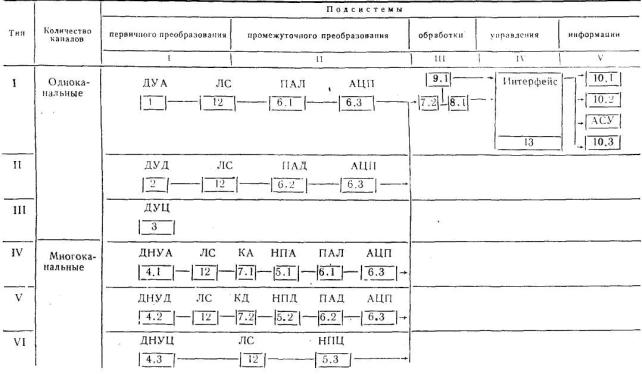
Структурные единицы (компоненты) ИИС
1. Датчик с унифицированным выходным сигналом напряжения или тока (аналоговый).
2. Датчик с унифицированным аналоговым сигналом в виде периода (частоты) следования импульсов или интервала времени между двумя импульсами.
3. Датчик с унифицированным цифровым сигналом (двоичный код, двоично-десятичный код с весами 8-4-2-1, алфавитно-цифровой код).
4. Датчик с неунифицированным выходным сигналом, преобразующий измерительную характеристику или величину в сигнал произвольного вида (напряжение, ток - мгновенный или эффективный, частота, фаза, сопротивление, емкость, индуктивность, собственная частота колебательного контура):
4.1. Аналоговый непрерывный.
4.2. Аналоговый дискретный.
4.3. Цифровой.
5. Нормализующий преобразователь (преобразующий входной сигнал в унифицированный сигнал):
5.1. Преобразователь аналоговый напряжения, тока.
5.2. Преобразователь аналоговый импульсный.
5.3. Преобразователь с цифровым выходным сигналом.
6. Преобразователь унифицированных сигналов.
6.1. Аналогового непрерывного в аналоговый непрерывный.
6.2. Аналогового непрерывного в аналоговый дискретный и обратно.
6.3. Аналогоцифровой:
напряжения, тока в код;
периода, частоты, интервала, времени в код.
7. Коммутатор:
7.1. Аналоговых сигналов.
7.2. Импульсных сигналов.
7.3. Цифровых сигналов.
8. Спецвычислитель (мини-ЭВМ).
9. Память (микропроцессор):
9.1. Буферная.
9.2. Накопитель данных.
10. Средство отражения данных:
10.1. Визуального.
10.2. Документального.
10.3. Накопления.
11. Формирователь потока данных (для отбора данных от всех источников информации и формирование выходного потока с целью выдачи требуемой последовательности команд для управления источником информации).
12. Линия связи.
12.1. Проводная.
12.2. Радиосвязь.
13. Средство согласования сечений (интерфейс) и контролер.
Группы компонентов
По признаку единообразия описания свойств АС
1. Компоненты 1; 4.5; 5.1; 6.1 с непрерывными аналоговыми сигналами на входах и выходах.
2. Компоненты 7.1; 7.2, осуществляющие коммутацию непрерывных аналоговых сигналов.
3. Компоненты 2; 4.2: 5.2; 6.2 с аналоговыми сигналами на входе и выходе, один из которых или оба дискретные.
4. Компоненты 3; 4.4: 5.3; 6.3, а также цифровые измерительные приборы, осуществляющие аналого-цифровое преобразование.
5. Компоненты 7.4; 8, 9; 11; 12; 13; 14 с цифровыми сигналами на входе и выходе.
6. Компонент 10, осуществляющий визуальное и документальное отображение накопления цифровых данных.
Группы компонентов по признаку преобразования измерительной информации
|
№ п/п |
Вид преобразования измерительной информации |
Компонента |
Подсистема ИИС |
|
1 |
Аналоговое преобразование |
1; 4.1; 5.1; 6.1 |
I , II |
|
2 |
Аналого-дискретное преобразование |
2; 4.2; 5.2; 6.2 |
I , II |
|
3 |
Аналого-цифровое преобразование |
3; 4.3; 5.3; 6.3 |
I , II |
|
4 |
Коммутация аналоговых сигналов |
7.1 |
II |
|
5 |
Цифровое преобразование |
7.3; 8; 9; 11 - 14 |
III , IV |
|
6 |
Представление информации |
10.1; 10.2; 10.3 |
V |