Анализ норм проектирования полотна автомобильных дорог зарубежных стран на примере последних норм и правил Федеративной Республики Германии. Приложение I. Часть "Проложение трассы автомобильных дорог" (RAS-L)
ГОСУДАРСТВЕННАЯ СЛУЖБА ДОРОЖНОГО ХОЗЯЙСТВА
МИНИСТЕРСТВА ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ
АНАЛИЗ НОРМ ПРОЕКТИРОВАНИЯ ПОЛОТНА АВТОМОБИЛЬНЫХ ДОРОГ ЗАРУБЕЖНЫХ СТРАН НА ПРИМЕРЕ ПОСЛЕДНИХ НОРМ И ПРАВИЛ ФЕДЕРАТИВНОЙ РЕСПУБЛИКИ ГЕРМАНИИ
Приложение I
часть "Приложение трассы автомобильных дорог"
( RAS - L )

Москва 2003
СОДЕРЖАНИЕ
|
1. ВВЕДЕНИЕ 1.1. Область применения 1.2. Назначение 1.3. Применение 2. ПРОЦЕСС ПРОЕКТИРОВАНИЯ И СТАДИИ РАЗРАБОТКИ ПРОЕКТА 2.1. Предпроектное проектирование 2.2. Утверждаемый проект 2.3. Проект установления положения трассы (установление положения трассы) 2.4. Строительный проект (исполнительный проект) 3. ОСНОВНЫЕ СКОРОСТИ ДЛЯ РАСЧЕТА ПРОЕКТНЫХ ЭЛЕМЕНТОВ 3.1. Определение понятий 3.2. Установление скоростей 3.3. Соотношение проектной скорости Ve со скоростью V85 3.4. Равномерность изменения скорости 4. ПРОЕКТНЫЕ ЭЛЕМЕНТЫ В ПЛАНЕ 4.1. Прямая 4.2. Круговая кривая 4.3. Переходная кривая 5. ПРОЕКТНЫЕ ЭЛЕМЕНТЫ В ПРОДОЛЬНОМ ПРОФИЛЕ 5.1. Продольный уклон 5.2. Выпуклые и вогнутые вертикальные кривые 6. ПРОСТРАНСТВЕННОЕ ПОЛОЖЕНИЕ ПОЛОТНА ДОРОГИ 6.1. Элементы пространственного положения дороги 6.2. Пространственное представление полотна дороги 7. ПРОЕКТНЫЕ ЭЛЕМЕНТЫ В ПОПЕРЕЧНОМ ПРОФИЛЕ 7.1. Поперечный уклон на прямой 7.2. Поперечный уклон на круговой кривой 7.3. Отгон поперечного уклона 7.4. Уширение проезжей части 7.5. Уширение проезжей части на кривой 7.6. Серпантины 8. ПРОЕКТНЫЕ ЭЛЕМЕНТЫ ВИДИМОСТИ 8.1. Требуемые расстояния видимости 8.2. Фактические расстояния видимости для остановки и встречного автомобиля для обгона 9. СВОДНЫЕ ДАННЫЕ И ТАБЛИЦА ОСНОВНЫХ ГЕОМЕТРИЧЕСКИХ ЭЛЕМЕНТОВ И ИХ ДОПУСТИМЫХ ЗНАЧЕНИЙ ПРИЛОЖЕНИЕ 1 ОПРЕДЕЛЕНИЕ СКОРОСТИ V85 НА ДВУХПОЛОСНЫХ ДОРОГАХ С ОДНОЙ ПРОЕЗЖЕЙ ЧАСТЬЮ ДЛЯ ДОРОГ ГРУППЫ А (к п. 3.2) ПРИЛОЖЕНИЕ 2 СОПУТСТВУЮЩИЕ МЕРОПРИЯТИЯ РЕКОНСТРУКЦИИ СУЩЕСТВУЮЩИХ ДОРОГ ПРИ НЕБЛАГОПРИЯТНОМ ПРОСТРАНСТВЕННОМ ВИДЕ ПОЛОТНА ДОРОГИ ПРИЛОЖЕНИЕ 3 РАСЧЕТ МИНИМАЛЬНЫХ РАДИУСОВ КРИВЫХ В ПЛАНЕ (к п.п. 4.2.2, 7.2.3) ПРИЛОЖЕНИЕ 4 ГЕОМЕТРИЯ КЛОТОИДЫ (к п. 4.3.1) ПРИЛОЖЕНИЕ 5 УЧАСТКИ ИЗМЕНЕНИЯ (ОТГОНА) ПОПЕРЕЧНОГО УКЛОНА НА ПЕРЕХОДНОЙ КРИВОЙ (к п.п. 7.3.2, 7.3.3) ПРИЛОЖЕНИЕ 6 РАСЧЕТ ВЫПУКЛЫХ И ВОГНУТЫХ ВЕРТИКАЛЬНЫХ КРИВЫХ (к п. 5.2.1) ПРИЛОЖЕНИЕ 7 ВЗАИМОСВЯЗЬ МЕЖДУ МИНИМАЛЬНЫМ РАДИУСОМ ВЫПУКЛОЙ КРИВОЙ И РАССТОЯНИЕМ ВИДИМОСТИ ДЛЯ ОСТАНОВКИ АВТОМОБИЛЯ (к п. 5.2.2) ПРИЛОЖЕНИЕ 8 КРИВАЯ СХОДА (ОСОБЫЙ ВИД ВЫПУКЛЫХ И ВОГНУТЫХ ВЕРТИКАЛЬНЫХ КРИВЫХ) ПРИЛОЖЕНИЕ 9 ИЗМЕНЕНИЕ УШИРЕНИЯ КРОМОК ПРОЕЗЖИХ ЧАСТЕЙ ПРИЛОЖЕНИЕ 10 ОПРЕДЕЛЕНИЕ РАССТОЯНИЯ ВИДИМОСТИ (к разделу 8)
|
В Приложении I "Нормы и правила проектирования автомобильных дорог Федеративной Республики Германии", часть "Проложение трассы автомобильных дорог" ( RAS - L ), изложены принципы, методы, а также приведены допустимые и рекомендуемые значения элементов в плане, продольном профиле при проектировании строительства, реконструкции и капитального ремонта автомобильных дорог. Приводится геометрическое построение трассы, полотна автомобильной дороги с учетом особенностей прямолинейного и криволинейного характера трассы, последовательного изменения в плане, продольном профиле, с выполнением различными способами отгона поперечных уклонов и уширений, даются указания и основные положения для пространственного трассирования полотна дороги, оценка и обеспечение видимости посредством предложенной геометрической модели.
Приложение I "Нормы и правила проектирования автомобильных дорог Федеративной Республики Германии" разработаны Научно-исследовательским обществом по строительству дорог и транспорту, рабочей группой "Проектирование дорог". Утверждены Федеральным Министерством транспорта ФРГ 24.11.1995 г. Изданы в 1995 г. Продолжением Приложения I , часть "Проложение трассы автомобильных дорог" ( RAS - L ), является Приложение II , часть "Поперечные профили автомобильных дорог" ( RAS - Q ), которые будут изложены в следующей книге.
Материал перевел на русский язык и подготовил к изданию канд. техн. наук
В.А. Федотов
(ГУ "Росдорэкспертиза ")
1. ВВЕДЕНИЕ
1.1. Область применения
В соответствии с «Руководством по функциональной организации сети автомобильных дорог» ( RAS- N) автомобильные дороги общего пользования подразделяются по местоположению (свободные или застроенные территории); прилегающей застройке к дороге (незастроенные или застроенные дороги); основному функциональному значению (обеспечение транспортной связи, обслуживание прилегающих территорий, местопребывание (стоянка) на пять представленных в табл. 1, 2 групп от А до Е.
В соответствии со значением дороги для обеспечения транспортной связи и с выполнением определенных задач в дорожной сети (характеризуемым по RAS- N функциональными уровнями от I до VI) автомобильные дороги групп от А до Е можно подразделить на 16 категорий. Этим категориям автомобильных дорог поставлены в табл. 2 в соответствие определенные проектные и эксплуатационные показатели.
Нормы и правила проектирования автомобильных дорог, часть «Проложение трассы автомобильных дорог» ( RAS- L), предназначены для проектирования нового строительства, реконструкции и капитального ремонта автомобильных дорог группы А, а также категорий В I и В II.
Для дорог категорий В III и В IV при отсутствии застройки, а также для дорог групп от С до Е при наличии застройки должны применяться «Рекомендации по проектированию дорог общегородского значения» ( EAHV 1993) и «Рекомендации по проектированию дорог в населенных пунктах» (ЕАЕ 1985/95).
Таблица 1
Область применения Норм и правил проектирования автомобильных дорог, часть «Проложение трассы автомобильных дорог» ( RAS- L)
|
Группы дорог |
Проложение трассы по территориям |
|||||
|
Функциональное подразделение уровней связи |
свободным |
застроенным |
||||
|
При отсутствии застройки |
При наличии застройки |
|||||
|
Транспортная связь |
Обслуживание территорий |
Местопребывание |
||||
|
А |
В |
С |
D |
Е |
||
|
Протяженная межрегиональная дорожная связь |
I |
AI |
BI |
CI |
Нет |
Нет |
|
по RAS - L |
по RAS - L |
по EAHV |
||||
|
1993 |
||||||
|
Межрегиональная региональная дорожная связь |
II |
А II |
В II |
С II |
DII |
Нет |
|
по RAS - L |
по RAS - L |
EAHV 1993 |
EAHV 1993 |
|||
|
Межрайонная дорожная связь |
III |
А III |
В III |
С III |
DIII |
Е III |
|
по RAS - L |
EAHV |
EAHV 1993 |
EAHV 1993 |
EAHV |
||
|
1993 |
1993 |
|||||
|
Дорожная связь обслуживания прилегающих территорий |
IV |
AIV |
В IV |
CIV |
DIV |
EIV |
|
по RAS - L |
ЕАЕ |
ЕАЕ |
ЕАЕ |
ЕАЕ |
||
|
1985/95 |
1985/95 |
1985/95 |
1985/95 |
|||
|
Второстепенная дорожная связь |
V |
AV |
- |
- |
DV |
DV |
|
по RAS - L |
ЕАЕ |
ЕАЕ |
||||
|
1985/95 |
1985/95 |
|||||
|
Местные связи в виде проездов |
VI |
А VI |
- |
- |
- |
Е VI |
|
ЕАЕ |
||||||
|
1985/95 |
||||||
Примечание: Знак «-» означает отсутствие данных связей на дорогах.
Таблица 2
Подразделение дорог по функциональному значению в сети, проектным и эксплуатационным показателям
|
Функциональное назначение дороги |
Проектные и эксплуатационные показатели |
|||||||
|
Группа |
Категория дороги |
Тип движения |
Допустимая скорость V до км/ч |
Поперечный профиль |
Пересечения дорог |
Проектная скорость Vo , км/ч |
||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
||
АДороги на свободных от застройки территориях с преобладающей функцией дорожной транспортной связи |
А I Протяженные межтерриториальные дороги |
Автомобили |
- |
Две проезжие части |
Разные уровни |
120 100 |
||
|
То же |
≤ 100(120) |
Одна проезжая часть |
Разные уровни, в одном уровне |
100 90 (80) |
||||
|
А II Межрегиональные / региональные дороги |
-"- -"- Смешанное |
≤ 100 |
Две проезжие части Одна проезжая часть |
Разные уровни, в одном уровне в одном уровне |
100 90 (80)
90 80 (70) |
|||
|
А III Межрайонные дороги |
Автомобили Смешанное |
≤100 ≤100 |
Две проезжие части Одна проезжая часть |
Разные уровни, в одном уровне В одном уровне |
(90)80 70
80 70 60 |
|||
|
А IV Обслуживающие дороги |
То же |
≤100 |
То же |
То же |
70 60 (50) |
|||
|
А V Второстепенные дороги |
-"- |
≤100 |
-"- |
-"- |
(50) Нет |
|||
|
А VI Местные дороги, проезды |
-"- |
≤100 |
-"- |
-"- |
Нет |
|||
ВДороги на выходах из городов и в застроенных территориях с преобладающей функцией дорожной транспортной связи |
В I Городские автомагистрали |
Автомобили |
≤100 |
Две проезжие части |
Разные уровни |
100 90 80 (70) |
||
|
В II Скоростные дороги |
То же |
≤80 |
То же |
Разные уровни, в одном уровне |
80 70 (60) |
|||
|
В III Дороги общегородского значения |
Смешанное |
≤70 |
-"- |
В одном уровне |
70 60 70 60 (50) |
|||
|
То же |
≤70 |
Одна проезжая часть |
То же |
|||||
|
В IV Дороги районного значения |
-"- |
≤60 |
Тоже |
-"- |
60 50 |
|||
CДороги в населенных пунктах с преобладающей функцией транспортной связи |
С III Дороги общегородского значения |
Смешанное |
50 50 |
В одном уровне |
-"- |
(70) (60) 50 (40) (60) 50 (40) |
||
|
С IV Дороги районного значения |
-"- |
50 |
-"- |
-"- |
50 (40) |
|||
DДороги в населенных пунктах с преобладающей функцией обслуживания территорий |
DIVДороги районного значения |
-"- |
≤50 |
-"- |
-"- |
Нет |
||
DVДороги и улицы местного значения |
-"- |
≤50 |
-"- |
-"- |
Нет |
|||
ЕЗастроенные дороги в населенных пунктах с преобладающей функцией местонахождения транспорта |
EV Дороги местного значения |
-"- |
Скорость по местным условиям |
-"- |
-"- |
Нет |
||
|
EVI Проезды к домам |
-"- |
-"- |
-"- |
Нет |
||||
Примечание . В скобках даны применяемые значения в исключительных случаях.
Дороги категории А VI (например, сельскохозяйственные и дороги лесных угодий) должны проектироваться по специальным техническим указаниям.
1.2. Назначение
Нормы и правила проектирования автомобильных дорог, часть «Проложение трассы автомобильных дорог» ( RAS- L) являются основой для проектирования безопасных и функционально отвечающих своему предназначению дорог. В Нормах и правилах задокументировано техническое состояние предмета. Положения Норм и правил основываются на теоретических работах, результатах научных исследований и на практическом опыте. Их применение должно способствовать однообразию одинаковых по значению дорог, делать четко различимыми неодинаковые по значимости дороги посредством различной величины параметров, характерных для разных категорий дорог. Принципы проектирования в данных Нормах и правилах относятся к категориям дорог, приведенным в табл. 3.
Функциональное подразделение дорог по значению в дорожно-транспортной сети позволяет лучше учитывать постановку, решение различных транспортных и других задач для удовлетворения потребностей в обеспечении необходимых связей. Благодаря дифференцированному подходу к установлению проектных элементов должны приниматься во внимание также интересы:
• организации территорий и районной планировки;
• охраны окружающей среды и организации придорожного ландшафта;
• планировки городов и населенных мест, а также обустройства придорожной полосы;
• экономичности строительства и эксплуатации;
• экономии энергетических ресурсов;
• охраны землепользования.
Таблица 3
Принципиальные особенности для проектирования дорог группы А и категорий В I и В II
|
Группа |
Категория дороги |
Принцип проектирования |
Определение скорости VS 5 |
Использование коэффициента сцепления в поперечном направлении |
Переходная кривая |
Соотношение радиусов круговых кривых в плане |
Время реакции и действия, с |
Расстояние видимости встречного автомобиля при обгоне |
|
А Дороги на свободных от застройки территориях с преобладающей функцией дорожной транспортной связи |
А I Дальние межтерриториальные дороги |
На основе динамики движения |
Две проезжие части При V е 100 км/ч V 85 = V е +10 км/ч При V е ≤ 100 км/ч V 85 = V e + 20 км/ч Приложение 1: Одна проезжая часть Случай 1: зависит от искривленности ( KU ) и ширины проезжей части (В) Случай 2: зависит от радиуса кривой в плане ( R ) и В |
50% при максимальном поперечном уклоне q 10% при минимальном поперечном уклоне q |
Требуется |
Требуется |
2 |
Требуется (одна) проезжая часть, двухполосные дороги) |
|
А II Межрегиональные региональные дорога |
||||||||
|
А III Межрайонные дороги |
||||||||
|
А IV Обслуживающие дороги |
||||||||
|
А V Второстепенные дороги |
||||||||
|
А VI Местные проезды |
Геометрия движения |
Нет |
Нет |
Не требуется |
Не требуется |
Нет |
Не требуется |
|
|
В Внегородские дороги на выходах из городов и в застроенных территориях с преобладающей функцией дорожной транспортной связи |
В I Городские автомагистрали |
На основе динамики движения |
V 85 = V доп |
50% при максимальном поперечном уклоне q 10% при минимальном поперечном уклоне q |
Требуется |
Не требуется |
2 |
Не требуется |
|
В II Скоростные дороги |
1.3. Применение
По содержанию и цели предназначения Нормы и правила проектирования автомобильных дорог, часть «Проложение трассы автомобильных дорог» ( RAS- L), не содержат готовых решений для проектных задач. Они устанавливают пределы свободы действий при выборе путей решения, являющихся необходимыми в процессе тщательной проработки проекта, для их оценки с учетом также других, ниже приводимых, интересов.
При применении Норм и правил нельзя руководствоваться только жесткими требованиями и критериями; необходимо принимать во внимание в большей степени многообразие взаимосвязей между трассой автомобильной дороги, безопасностью и беспрепятственностью движения транспортных средств; территориально-районной и градостроительной планировкой, их проблемами; экономической эффективностью строительства и эксплуатации; защитой природы и окружающей среды; требованиями не связанных с проблемами транспорта землепользователей, и ее окончательное положение должно быть результатом нахождения общего гармоничного и взаимосогласованного решения.
Изложенные в Нормах и правилах принципы и положения позволяют производить тщательную проработку проектных решений в каждом отдельном случае и, в частности, тогда, когда имеется необходимость в учете интересов окружающей среды в сопоставлении при этом с требованиями безопасности движения и экономичностью. Часто задача установления трассы в плане сводится непосредственно к тому, чтобы на основе всестороннего анализа конфликтных ситуаций между спросом на необходимость транспортной связи, с одной стороны, и другими господствующими интересами, с другой стороны, проработать все возможные отдельные решения в сопоставлении между собой как проявление различных факторов на развитие района тяготения дороги.
В особых случаях при соответствующем обосновании могут быть рассмотрены отклонения от допустимых значений, полученных на основе законов и формул динамики движения. В пояснительной записке к проекту должны быть обстоятельно изложены эти обоснования.
Такие отклонения приводят, как правило, к снижению стандарта транспортно-эксплуатационных качеств дороги и могут повлиять на снижение безопасности движения. Понижение геометрических характеристик неизбежно происходит на дорогах категорий В I и В II из-за неизбежной необходимости учета градостроительных условий и ограничений. При такого рода отклонениях от нормативных требований после сопоставления и анализа конфликтных ситуаций, обусловленных местными условиями, и возможностей нахождения проектных решений необходимо дать обоснование тому, что рекомендуемое в результате решение лучше всего отвечает конкурирующим интересам, в отношении безопасности движения является приемлемым, а в отдельных случаях - с дополнительными компенсирующими мероприятиями по созданию оптически наглядного направления дороги, с установкой соответствующих дорожных указателей и знаков.
При проложении трассы дорог на свободных от застройки территориях следует обращать внимание на окружающее придорожное пространство. При проектировании таких дорог необходимо наряду с интересами строительства дороги и движения транспортных средств по ней учитывать в сопоставлении между собой интересы:
• защиты природы и сохранения ландшафта;
• сохранения природных ресурсов;
• защиты окружающей среды от вредного воздействия.
При этом всегда необходимо уделять должное внимание безопасности движения.
Основным фактором для проложения трассы является топография местности, на которой производится поиск ее положения. Это означает, что согласованная по величине радиусов кривых трасса (соотносительное трассирование) является характерной, прежде всего, для пересеченной местности, например, предгорной или холмистой, и здесь согласование параметров оказывает определяющее значение на безопасность движения. Выдерживание соотношения радиусов в таких случаях важнее, чем соблюдение допустимых значений радиусов круговых кривых.
На равнинном и плоском рельефе или в горных условиях соотносительное трассирование редко удовлетворяет требованию гармоничного согласования с ландшафтом и экономичности. На протяженных равнинных участках рельефа местности ожидания водителя никак не направлены на появление извилистых участков. Здесь заранее намеченные на плане очертания (например, границы коридоров, трубопроводы, другие транспортные коммуникации), выступы рельефа, изломы в ландшафте (например, границы лесных массивов) могут успешно использоваться в виде ограничений для проложения трассы. Трасса, принужденная быть в таких случаях извилистой, воспринимается часто противоестественной и надуманной.
В условиях выраженного горного рельефа при проложении трассы с преодолением большой разности высот посредством серпантин водитель также не ожидает перед собой комфортно проезжаемый участок дороги, уложенной в соответствии с соотносительным принципом, а предполагает встретить извилистый, сложный для движения участок дороги. И пока неравномерности в характере трассы заставляют водителя обращать на себя внимание, как в описанных выше случаях, соотносительное трассирование не может быть применено.
При реконструкции и капитальном ремонте дорог также нельзя полностью использовать принцип соотносительного назначения радиусов. От него можно отходить, когда достаточное расстояние видимости обеспечено, места повышенной опасности распознаются своевременно и являются наглядными или внимание на них заранее может быть обращено путем установки указателей.
Для дорог в пределах застроенных территорий воздействие на окружающую среду зависит от занятия прилегающих участков землепользователей и от наличия застройки. Поэтому при проектировании дорог категорий В I и В II требуется особый контроль за их совместимостью с окружающей средой в отношении:
• наличия претензий использования земель, не связанных с решением проблем движения транспортных средств;
• воздействия шума и загрязняющих веществ;
• использования зеленых зон;
• сохранения вида городской панорамы.
В тексте Норм и правил, в таблицах и на рисунках приводятся допустимые значения (минимальные и максимальные) для проектирования полотна дороги, параметры которых выведены и получены на основе требований динамики, геометрии, оптически наглядного безопасного движения одиночного автомобиля по технически совершенной поверхности с обеспеченным водоотводом. Положения, вытекающие преимущественно из принципов единообразия и эстетики, в Нормах и правилах отмечаются особо.
2. ПРОЦЕСС ПРОЕКТИРОВАНИЯ И СТАДИИ РАЗРАБОТКИ ПРОЕКТА
Проектирование автомобильных дорог является постоянным рабочим процессом и, начиная от плановой идеи необходимости в дороге, проходит несколько этапов до инженерного сопровождения строительства с результатом на каждом из них получения последовательным приближением более совершенного проекта, представляемого в чертежах, с расчетами и текстовым материалом основных проблем и выводов.
Этапы - последовательно сменяемые друг друга стадии проектирования, в процессе которых проектные материалы прорабатываются все более детально и точно.
На каждой стадии должны быть получены и представлены промежуточные и окончательные проектные решения с обстоятельным их документированием. Процесс разработки проекта последовательно проходит все стадии до своего логического завершения проектирования объекта его строительством. Охрана окружающей среды (ООС) является составной и интегрированной частью всех стадий проектирования.
На всех стадиях проектирования выполняется определенная проектная работа, в процессе которой находят применение Нормы и правила проектирования автомобильных дорог, часть «Проложение трассы автомобильных дорог» ( RAS- L).
Генеральный процесс проектирования и стадии разработки проекта показаны на примере нового строительства федеральной автомобильной дороги ( рис. 1). Соотнесение части «Проложение трассы автомобильных дорог» ( RAS- L) и других важных частей Норм и правил проектирования составных элементов дорог, а также Рекомендаций к отдельным стадиям проектирования даны на рис. 2.
Многообразие взаимосвязей между процессом движения, проектированием дороги и аспектами охраны окружающей среды требует при разработке проекта даже внутри каждой отдельной стадии итеративного подхода. Для внесения ясности в процесс последовательных приближений к окончательному проекту на рис. 3 представлена методика выполнения проектных работ во взаимосвязи норм и правил части «Проложение трассы автомобильных дорог» ( RAS- L) с другими важными частями норм и правил проектирования составных элементов дорог, а также с другими Рекомендациями.
2.1. Предпроектное проектирование
Предпроектное проектирование служит для нахождения положения трассы и начинается - преимущественно на основе планирования потребностей в дорогах - с ограничения по площади территорий на ее местоположение и их анализа. Исходя из обеспечения транспортных потребностей, эти ограничения на размеры территории должны позволить включить и рассмотреть в их пределах все приемлемые варианты, чтобы можно было изучить и установить существенные проявления планируемой дороги на окружающую среду. При этом изучаются возможные последствия воздействия на природоохранные зоны согласно закону о защите природной среды в рамках оценки воздействия на окружающую среду. На основе анализа чувствительности воздействия выполняется оценка территории, а также и охранных зон в соответствии с законом о защите природной среды.
В результате всестороннего анализа территорий выявляются, с одной стороны, конфликтные зоны, а с другой стороны - свободные или менее конфликтные коридоры. В этих коридорах и прорабатываются различные варианты возможного положения трассы в плане, а также и в продольном профиле вместе с сопутствующими мероприятиями. При этом оценке подлежат все находящиеся невдалеке приемлемые варианты, включая и рекомендуемый вариант.
В конечном итоге необходимо представить преимущества и недостатки всех вариантов в сопоставлении их между собой. Рассмотрению подлежит и нулевое решение как исходный вариант сохранения существующего состояния. Важнейшими критериями для оценки и принятия решения являются:
• транспортные соображения (например, качество транспортной связи, пропускная способность, безопасность движения, разгрузка дорог и улиц в населенных пунктах);
• воздействие на природоохранные зоны в соответствии с законом о защите природной среды (человек, животный мир, растительность, почва, вода, воздух, климат, ландшафт, культурные и прочие заповедные места);
• интересы обустройства прилегающих территорий (панорама населенного пункта, возможности развития городской и поселковой среды, нанесение ущерба городской и поселковой среде в их черте, нарушение намерений заинтересованных лиц);
• воздействие на другие структуры (структура расселения и экономики, сельское и лесное хозяйство);
• экономические интересы (особенно строительная стоимость, организация строительства и эксплуатационные расходы).
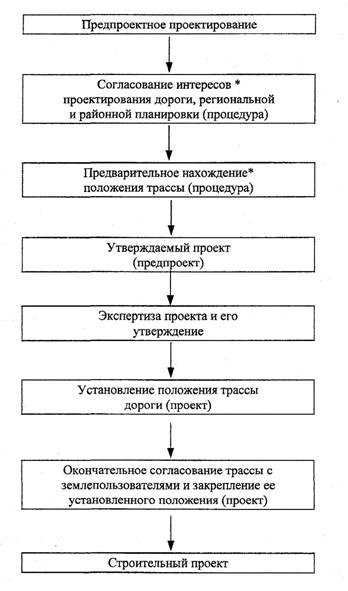
Рис. 1 . Стадии разработки проекта для нового строительства
федеральной автомобильной дороги;
* - выполняется в случае необходимости
|
Основные показатели проектирования при разработке проекта автомобильной дороги |
Предпроектное проектирование – предварительное положение трассы |
Утверждаемый проект (предпроект) |
Проект установления и закрепления положения, трассы дороги |
Строительный проект |
|
Качество транспортного обслуживания |
Функциональное значение дороги в дорожно-транспортной сети по RAS - N |
- |
- |
- |
|
|
Установление и расчет поперечного профиля по RAS - Q |
|||
|
Безопасность движения |
Проектирование по RAS - L |
|||
|
Проектирование по RAS - Q (поперечные профили) |
||||
|
Проектирование по RAS - K 1, RAS - K 2 (пересечения, транспортные развязки) |
||||
|
Обстановка дороги |
||||
|
Охрана окружающей среды |
Указания UVPI ( MUVS ) |
- |
Строительный план мероприятий по охране окружающей среды |
|
|
- |
UVPII Сопроводительный план мероприятий по охране окружающей среды по RAS - LPI |
|||
|
Эмиссия вредных веществ по RLS , MLuS |
||||
|
Экономическая эффективность |
Анализ экономической эффективности проекта по RAS - W |
- |
- |
|
Рис. 2. Применение различных частей Норм и правил на разных стадиях проектирования автомобильных дорог
На основе сравнения вариантов выявляется предпочтительный рекомендуемый вариант. Этот вариант в качестве основного предпроектного варианта (с установленным положением трассы дороги) является основанием для прохождения процедуры согласования трассы дороги. В зависимости от законодательных, нормативно-правовых основ строительства дороги и нормативно-правовых актов земельного законодательства необходимо для этого провести процесс согласования на территориально-организационно-правовом уровне, пройти процесс подтверждения и закрепления представленного положения трассы.
Целью процедуры установления трассы является проведение и получение согласований намечаемых строительных мероприятий с другими значимыми плановыми объектами строительства, с задачами и целями обустройства территорий, с районной планировкой и с общинными интересами.
Рис. 3 . Методика процесса проектирования по Нормам и правилам проектирования автомобильных дорог, часть «Проложение трассы автомобильных дорог» ( RAS - L ) (дороги на свободных от застройки территориях):
А - параметр клотоиды; R -радиус круговой кривой; Hk , Hw - соответственно радиус вертикальной выпуклой и вогнутой кривой; Sm ах - максимальное расстояние видимости; γ - угол поворота трассы, L - длина трассы; S k , Su - соответственно расстояние видимости для остановки автомобиля и при обгоне; q max , q min - соответственно максимальный и минимальный поперечный у клон; Δ s max , . Δ s min - соответственно максимальное и минимальное нарастание продольного уклона за счет возвышения внешней кромки проезжей части; q факт - фактический продольный уклон в данном сечении дороги
Наряду с участием заказчиков в выполнении мероприятий для общегосударственных нужд в рамках этого процесса впервые происходит формальное участие общественности и признанных организаций по охране окружающей среды.
2.2. Утверждаемый проект
Для того чтобы выполненные на предпроектной стадии материалы проделанной работы по сопоставлению и проработкам были доведены как можно быстрее до окончательного проектного положения трассы дороги, стадии проектирования должны быстро сменять друг друга. Поэтому преобладает стремление выполнить проект «одним махом», который в каждом случае в соответствии с целями прохождения различных процедур (утверждение органом управления заказчика, установление положения трассы на территории) имеет и разные по составу материалы.
На основе согласованных и принятых предпроектных материалов (предпроектное проектирование) разрабатывается утверждаемый проект (предпроект). Он служит для внутреннего рассмотрения органами управления дорожным хозяйством. После экспертизы технических решений, правовых аспектов и связанных с ними финансовых затрат, стоимости дорожно-строительных мероприятий проект утверждается, что является основанием для проведения предварительного землеотвода.
Утверждаемый проект (предпроект) разрабатывается и представляется в чертежах на основе «Указаний по стандартному оформлению проектных материалов для строительства автомобильных дорог» ( RE), как правило, в масштабах от 1:5000 до 1:1000 для дорог на свободных от застройки территориях. На застроенных территориях и в условиях сложного рельефа масштаб увеличивается до 1:250. План дороги содержит координаты и указатель направления. Продольный профиль представляется по отдельным участкам в одинаковом по длине с планом масштабе. В продольном профиле важными элементами наряду с проектной линией являются графики изменения кривизны дороги в плане и поперечного уклона с взаимным положением кромок проезжей части.
К проекту прикладываются в обязательном порядке обзорная карта М 1:25000-1:100000 и ситуационный план с проработанными вариантами в масштабе в пределах 1:5000-1:25000 со всеми деталями, особенностями и мероприятиями других инвесторов, влиявшими на принятие рекомендуемого варианта, а также ситуационный продольный профиль на все протяжение дороги в соответствующем ситуационному плану масштабе.
В составе материалов этого проекта особенно тщательно должны быть разработаны и представлены:
• технический проект дороги в плане, продольном и поперечном профилях;
• сопроводительный план мероприятий по защите и охране окружающей среды;
• гидрологические и водохозяйственные результаты обработанных изысканий;
• технические результаты исследований выбросов и загрязнений (вредные вещества, шум).
Кроме этого, в утверждаемом проекте должны быть представлены другие его составные разделы (пересечения и примыкания, транспортные развязки, искусственные сооружения и др.) с необходимой степенью детализации их решений.
2.3. Проект установления положения трассы (установление положения трассы)
Для стадии проектирования «Проекта установления положения трассы» утверждаемый проект (предпроект) подлежит дальнейшей проработке до проекта установления положения трассы дороги. На этой стадии необходимые с правовой точки зрения детали прорабатываются с достаточной для этого точностью, как правило, в масштабе 1:1000 или 1:500. Из проекта установления положения трассы всем участвующим в согласовании сторонам должны быть наглядно представлены вид и объем затронутых интересов. Проект является основанием для общей оценки общественно-правовых и частных интересов при установлении положения трассы дороги и при регулировании вопросов отвода земель и их отчуждения.
2.4. Строительный проект (исполнительный проект)
Для выполнения строительных работ разрабатывается строительный проект. Для этого полученные согласования и изменения на стадии проекта установления положения трассы включаются как необходимые мероприятия в строительный проект. В этом проекте требуется более высокая степень дальнейшей технической детализации проектных решений (разбивочные планы, продольные профили с графиками изменения положения кромок, характерные и попикетные поперечные профили земляного полотна, проезжей части и др.). Проект должен быть детализирован настолько, чтобы быть надежным основанием для определения объемов и спецификации всех видов работ, для проведения торгов на строительные работы и их выполнения в процессе строительства. Чертежи выполняются по нормам и правилам RE на планах большого масштаба.
3. ОСНОВНЫЕ СКОРОСТИ ДЛЯ РАСЧЕТА ПРОЕКТНЫХ ЭЛЕМЕНТОВ
3.1. Определение понятий
Проектная (расчетная) скорость Ve устанавливается в качестве экономической и технической руководящей величины с учетом народнохозяйственных федеральных и территориальных интересов на основе предусмотренного функционального значения дороги в дорожно-транспортной сети. При этом принимается во внимание обеспечение качества транспортного обслуживания, которое должно отвечать этой функциональной связи. Проектная (расчетная) скорость V е определяет допустимые и рекомендуемые значения для большинства геометрических элементов (см. раздел 9). К ним относятся:
• минимальные радиусы кривых в плане;
• минимальные параметры клотоид;
• максимальные продольные уклоны;
• минимальные радиусы выпуклых и вогнутых кривых.
Благодаря этому проектная скорость оказывает определяющее влияние на транспортно-эксплуатационные качества и характеристики дороги, безопасность движения, уровень обслуживания и экономичность транспортной работы. Поэтому проектная скорость V е должна оставаться, по возможности, постоянной на протяженных взаимосвязанных участках дороги.
Скорость V85 представляет собой величину для контроля проектных элементов в плане и для расчета относящихся к надежности геометрических элементов плана, продольного и поперечного профилей. Эта скорость призвана отражать фактический режим движения и в приближении представлять скорость, которую не превышают 85% легковых автомобилей при движении в свободном потоке по мокрому покрытию. Для дорог с одной проезжей частью и с двумя полосами движения имеются относительно точные данные для оценки скорости V85 (п. 3.2 и Приложение 1 RAS- L). Напротив, для дорог на свободных от застройки территориях с двумя проезжими частями и для дорог группы В скорость V85 при сопоставлении требований безопасности и экономичности представляет собой установленную величину.
Скорость V85 варьируется обычно в процессе движения на одном участке. В каких границах допустимо это изменение, приводится в п.п. 3.3, 3.4.
Посредством скорости V85 определяются:
• поперечные уклоны на кривой;
• минимальные радиусы кривых при отрицательном поперечном уклоне;
• требуемые расстояния видимости до остановки;
• необходимые расстояния видимости встречного автомобиля для обгона.
3.2. Установление скоростей
Проектная (расчетная) скорость Ve принимается в зависимости от категории дороги по табл. 2. От желаемого качества транспортного обслуживания (задается посредством скорости сообщения по «Руководству по функциональной организации сети автомобильных дорог» ( RAS- N) и от сложности топографии местности или от наложения ограничений в виде контрольных точек должны назначаться большие или меньшие значения приведенных скоростей.
Для дорог категорий В I и В II проектная скорость Ve соответствует, как правило, допустимой максимальной скорости V доп.
Скорость V85 устанавливается и оценивается следующим образом.
Для дорог с одной проезжей частью и двумя полосами движения группы А скорость V85 изменяется в зависимости от геометрии участка дороги. На основе известных соотношений между геометрическими характеристиками и скоростью движения оценка скорости V85 для этих дорог проводится по методам, изложенным в Приложении 1 RAS- L. Эти методы следует применять отдельно для нового строительства ( случай 1) и для реконструкции и ремонта ( случай 2) дорог.
Дороги с одной проезжей частью с тремя полосами движения с поперечным профилем 2+1 на участках с предоставленным обгоном позволяют развивать высокие скорости движения и выпадают из метода определения скорости V85 для дорог с одной проезжей частью. Поэтому скорость V85 определяется по формуле (1) и не может превысить значение V85 = 100 км/ч.
Для дорог с двумя проезжими частями группы А отсутствуют надежные результаты о взаимосвязи между геометрическими характеристиками полотна и скоростью движения. Скорость V85 устанавливается для таких дорог по формулам (1) и (2):
V85 = Ve + 20 км/ч ( Ve < 100 км/ч), (1)
V85 = Ve + 10 км/ч ( V е ³ 100 км/ч). (2)
Для дорог категорий В I и В II скорость V85 = Vдоп.
3.3. Соотношение проектной скорости Ve со скоростью V85
Скорости Ve и V85 должны соотноситься между собой. Этим достигается соответствие между геометрическими элементами полотна дороги и режимом движения, выбираемым водителями, что особенно важно для дорог с малыми радиусами кривых в плане и большой извилистостью трассы.
При средних проектных скоростях Ve протрассированная в плане с минимальными значениями радиусов кривых дорога позволяет осуществлять движение по ней с более высокой скоростью V85, что соответствует 85% обеспеченности, чем это предполагалось при установлении проектной скорости Ve. Вследствие этого скорости Ve и V85 далеко не согласуются между собой. Если в таких случаях выбор более высокой проектной скорости V е для соответствующего участка дороги из экономических соображений невозможен, то необходимо, по меньшей мере, особенно тщательно проработать переход между участками с неравномерным характером с применением технических решений укладки трассы для выравнивания ее положения ( Приложение 2 RAS- L).
3.4. Равномерность изменения скорости
Проектная скорость V е должна оставаться на длинных взаимосвязанных участках в пределах единообразного топографического пространственного ландшафта, по возможности, постоянной. Тогда геометрические характеристики полотна дороги на всем протяжении для водителя представляются неизменными. На одном из протяженных участков дороги из-за резкой перемены топографии местности может произойти изменение геометрических элементов полотна дороги и тем самым стать возможной смена проектной скорости. В таких случаях расчетные элементы в пределах участка перехода от одних форм рельефа к другим необходимо, тщательно согласовав друг с другом, постепенно изменить.
Да и фактическая скорость движения (в приближении к V85) должна оставаться, по возможности, равномерной. Это можно обеспечить, прежде всего, благодаря соблюдению требуемого соотношения радиусов согласно п. 4.2.2. Установленная на основе динамики движения для одинаковой проектной скорости единообразная последовательность геометрических элементов в пределах отдельных участков способствует равномерному и экономичному режиму движения. Для дорог категорий В I и В II режим движения больше определяется допустимой скоростью движения, чем обоснованным выбором на основе динамики движения проектной скорости. Тем не менее, от принципа взаимного соответствия расчетных характеристик элементов нельзя отходить, если при этом не возникнут существенные недостатки в решении других задач (например, городская планировка, охрана памятников).
Если установленные скорости V85 на соседних участках различаются больше чем на 10 км/ч, то необходимо перепроверить возможность приведения во взаимное соответствие значений скоростей на обоих участках или создать посредством дополнительного усредненного участка постепенный переход с одного уровня скоростей к другому.
При реконструкции отдельных участков существующих дорог следует принимать во внимание расчетные элементы сохраняемых участков; при большой разнице в геометрических элементах переходы от одного участка к другому подлежат тщательной проработке. Переход от перестроенных в результате реконструкции участков к незатронутым ею участкам непременно обозначать дорожными знаками.
4. ПРОЕКТНЫЕ ЭЛЕМЕНТЫ В ПЛАНЕ
4.1. Прямая
4.1.1. Применение
В качестве проектного элемента прямая может иметь преимущество для дорог группы А:
• в условиях ей соответствующего пространственного ландшафта (например, на равнинном рельефе местности и в широких долинах);
• на участках пересечений и примыканий с другими дорогами;
• для создания глубины видимости встречного автомобиля для обгона на двухполосных дорогах, особенно на вогнутых вертикальных кривых;
• при приближении трассы к железным дорогам, каналам и к государственным границам.
Для дорог категорий В I и В II преимущества прямой заключаются:
• в учете городской планировочной организации территорий;
• в пределах пересечений и примыканий.
Однако длинные прямые при постоянном продольном уклоне имеют и недостатки, особенно для дорог группы А:
• затрудняют оценку расстояния и скорости движущихся навстречу и попутно автомобилей;
• способствуют побуждению водителей к движению с более высокой скоростью;
• повышают опасность ослепления водителей в темное время суток;
• не позволяют в холмистой местности свободно вписываться в структуру ландшафта и формы рельефа.
Отсюда следует, что при новом строительстве дорог группы А длинные прямолинейные участки с постоянным продольным уклоном необходимо избегать.
4.1.2. Рекомендуемые значения
Для дорог группы А длина прямых с постоянным продольным уклоном не должна превышать вследствие ослепления в темное время суток максимальной длины, равной 20-кратной проектной скорости Ve (км/ч).
Если необходима прямолинейная вставка между криволинейными участками с разносторонней кривизной, то ее максимально допустимая длина определяется по формуле (7) (п. 4.3.3.2).
Для дорог группы А следует исключать применение прямых между криволинейными участками с односторонней кривизной. В случае, если этого нельзя избежать, минимальная длина прямой должна быть равна 6-кратной величине проектной скорости Ve (км/ч) для обеспечения постоянства оптического восприятия направления дороги.
Для дорог группы А прямые должны чередоваться с круговыми кривыми и с переходными кривыми, чтобы с учетом элементов в продольном профиле создавались благоприятные пространственные направления положения и вид дороги.
4.2. Круговая кривая
4.2.1. Применение
Радиусы круговых кривых должны быть настолько большими, чтобы они:
• гармонировали по величине и следованию с характером рельефа местности и с выраженными формами ландшафта;
• находились в соответствии с обусловленным продольным профилем местности элементами проектной линии по величине, следованию и пространственному положению;
• позволили обеспечить равномерный режим движения, т.е. гармоничное соотношение между проектной скоростью Ve и скоростью V85.
Прежде всего, принимаемые во внимание интересы защиты и сохранения ландшафта при реконструкции существующих дорог группы А и заданные градостроительными условиями ограничения при новом строительстве, реконструкции и ремонте дорог категорий В I и В II требуют в каждом отдельном случае при назначении радиусов тщательного взвешенного подхода к соблюдению границ землепользования, с одной стороны, и к гармоничному проложению трассы дороги, с другой стороны.
4.2.2. Допустимые и рекомендуемые значения параметров
Радиусы следуемых друг за другом кривых, исходя из принципа безопасности движения для дорог группы А, должны находиться в соотносимом отношении (соотносительное трассирование).
Для величины радиусов смежных круговых кривых соотношения приводятся на рис. 4. Для дорог категорий А I и А II величины последовательных радиусов находятся в благоприятной области, для дорог категорий А III и А IV достаточно их нахождение в приемлемой области.
При реконструкции существующих дорог сохранение допустимых величин последовательности радиусов приводит часто к конфликту с другими целями организации природного ландшафта и городской планировкой. Но от сохранения допустимых величин следования радиусов для дорог категорий А III и А IV можно отказаться, если этим можно избежать особо негативных последствий. В таких случаях следует предусмотреть компенсационные мероприятия (п. 1.4 и Приложение 2 RAS- L).
Следует непременно избегать применения круговых кривых с односторонней кривизной и различными радиусами с общим тангенсом в точке стыковки. В таких случаях необходимо включение переходной кривой между отрезками круговых кривых различных радиусов (овальная клотоида).
Для последовательности элементов прямая - переходная кривая - круговая кривая в зависимости от длины L прямой оправданно применение минимальных радиусов кривых, приведенных ниже.
Длина прямой L, м Rmin круговой кривой, м
L ≥300м R min > 400м
L < 300м R min. > L
Жесткие границы не установлены. При применении этих данных необходимо проверять, не требуется ли назначение заведомо больших минимальных радиусов ( табл. 4), исходя из проектной скорости Ve. Круговые кривые, сопрягаемые с прямой, должны иметь, по крайней мере, при длине прямой L < 300 м соотношения по рис. 4. Для круговых кривых, для которых возможно отсутствие переходных кривых, рекомендации приводятся в п. 4.3.1.
Круговая кривая должна иметь минимальную длину из расчета возможности движения по ней с проектной скоростью Ve в течение не менее 2 с (см. табл. 4).
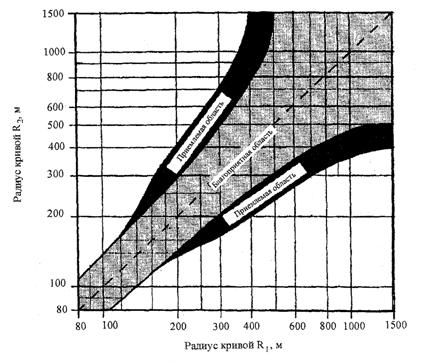
Рис.4 . Соотношения последовательности радиусов для дорог группы А
Таблица 4
Минимальные радиусы и минимальная длина круговых кривых
|
Проектная скорость V e , км/ч |
Минимальный радиус круговой кривой R min , м |
Минимальная длина круговой кривой L min , м |
|
50 |
80 |
30 |
|
60 |
120 |
35 |
|
70 |
180 |
40 |
|
80 |
250 |
45 |
|
90 |
340 |
50 |
|
100 |
450 |
55 |
|
120 |
720 |
65 |
Минимальные радиусы круговых кривых Rmjn представлены в табл. 4. Они зависят от проектной скорости Ve, величины использования сцепления в поперечном направлении « n» и допустимого значения поперечного уклона q. Отдельные особенности взаимной зависимости радиусов и поперечных уклонов могут быть заимствованы из рис. 28 (п. 7.2.1 и Приложение 3 RAS- L).
В случаях, когда минимальные радиусы кривых по табл. 4 или когда последовательность радиусов по рис. 4 не могут быть выдержаны, то обуславливаемое этим снижение безопасности движения должно быть ослаблено другими мероприятиями, например, улучшением наглядности кривой путем создания свободного коридора и исключения помех ее видимости. При неизбежном снижении порога минимальных радиусов или требуемой последовательности радиусов целесообразно, кроме того, указывать на наличие кривой соответствующим озеленением, направляющими устройствами или знаками на ней ( Приложение 2 RAS- L).
На дорогах с двумя проезжими частями препятствия для видимости на разделительной полосе (например, противоослепляющие защитные изгороди, ограждения, кустарники) способствуют часто снижению расстояния видимости по условию остановки. Поэтому в таких случаях необходимо расчетом проверять достаточность расстояния видимости до остановки для левой полосы движения по Приложению 10 RAS- L. Если расстояние видимости для остановки не обеспечивается, то необходимо предпринять ограничение скорости для мокрого покрытия, уширение центральной разделительной полосы, смещение барьерного ограждения от проезжей части или увеличить радиус кривой.
Минимальные радиусы кривых на серпантинах представлены в п.7.6.
4.3. Переходная кривая
4.3.1. Применение
Переходная кривая должна:
• обеспечивать плавный характер положения трассы постепенным изменением кривизны и тем самым осуществлять движение с постоянной скоростью при равномерном изменении возникающего при движении по ней центробежного ускорения;
• служить в качестве участка изменению поперечного уклона от прямой к круговой кривой;
• создавать оптически благоприятное положение трассы.
Применение переходной кривой необходимо на всех автомобильных дорогах.
Переходная кривая выполняется в виде клотоиды. При такой форме кривой кривизна изменяется линейно с ее длиной ( Приложение 4 RAS- L). Геометрическое выражение для клотоиды имеет вид
А2 = R • L, (3)
где А - параметр клотоиды, м;
R - радиус кривой в конце отрезка клотоиды, м;
L - длина клотоиды до точки с радиусом R, м.
Минимальные радиусы круговых кривых, при которых переходные кривые не применяются, приведены ниже.
V е, км/ч R, м
≤ 80 1500(1000)
> 80 3000 (2000)
В скобках даны значения, применяемые как исключительные при наличии местных ограничений.
Для круговых кривых при наличии отрицательного поперечного уклона становится необходимым назначение больших минимальных радиусов по табл.9 (п. 7.2.3). Переходную кривую можно не применять при угле поворота менее 10 гон или 9° (плоская кривая); однако в этом случае минимальная длина кривой L min (м), должна быть равной 2-кратной величине проектной скорости Ve (км/ч).
4.3.2. Допустимые значения
Для оптического восприятия переходная кривая должна иметь угол поворота, начиная от начальной точки, не менее 3,5 гон или 3,15°. Отсюда для наименьшего допустимого параметра клотоиды следует условие
![]() (4)
(4)
Из уравнения (4) получены представленные в табл. 5 минимальные параметры клотоиды.
Таблица 5
Минимальные параметры клотоиды
|
Проектная скорость V e , км/ч |
Минимальный параметр клотоиды, A min , м |
|
50 |
30 |
|
60 |
40 |
|
70 |
60 |
|
80 |
80 |
|
90 |
110 |
|
100 |
150(120) |
|
120 |
240 (120) |
Примечание . В скобках даны значения, применяемые как исключительные при наличии местных ограничений.
Из этого условия при больших радиусах получаются длинные переходные кривые. Для исключения в таких случаях проблем с водоотводом требуется выполнение отгона поперечного уклона по частям ( п. 7.3). Поскольку при этом могут возникнуть недостатки в отношении удобства движения и в управлении автомобилем, необходимо ограничить длину клотоиды при больших радиусах длиной, которая является необходимой для отгона поперечного уклона с минимальным нарастанием продольного уклона As min по табл. 10 (п. 7.3,2). Кроме того, при слишком длинных переходных кривых может оказаться невозможным размещение круговой кривой. В таких случаях параметр клотоиды может быть установлен меньше R/3 ( уравнение (40) Приложения 5 RAS- L). От требования соблюдения угла поворота т > 3,5 гон (3,15°) можно при этом отказаться; при меньших углах клотоида едва ли воспринимается водителем как кривая.
В случаях получения между клотоидами параметров А ≥ R/3 короткой круговой вставки, длина которой недостаточна для проезда по ней с проектной скоростью Ve в течение 2 с, необходимо принять ее длину, равную длине клотоид ( LA1 = LK = L a 2).
В качестве верхней границы для параметра клотоиды принимается из условия безопасности движения соотношение (5). На его основе получаемая клотоида имеет максимальный угол поворота τ = 31,8 гон (28,6°).
A m ах = R (5)
где А mах - максимальный параметр клотоиды, м;
R - радиус в конце клотоиды, м.
Кроме этого условия, параметр клотоиды по величине должен позволить выполнить полностью в пределах переходной кривой отгон поперечного уклона, не превышая максимально допустимого нарастания продольного уклона Δ smax ( п. 7.3.2 и Приложение 5 RAS- L).
4.3.3. Формы переходной кривой
Применение различных форм переходной кривой показано на рис. 5.
|
Соединение |
Широкое применение |
Не применять |
|
Прямая с круговой кривой |
Простая клотоида |
Коробовая клотоида |
|
Две круговые кривые |
Обратная клотоида |
- |
|
Обвальная клотоида |
- |
|
|
Две прямые только посредством переходных кривых |
- |
Стыкуемые клотоиды |
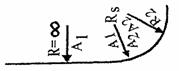
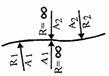
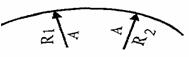
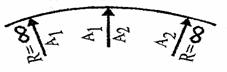
Рис. 5 . Применение клотоиды с прямыми и круговыми кривыми
4.3.3.1 . Простая клотоида
Простая клотоида предназначается для перехода от прямой к круговой кривой. Основным принципом при этом является то, что параметр клотоиды должен быть по величине тем больше, при условии соблюдения условий п. 4.3.2, чем меньше является последующий радиус круговой кривой. Переход становится, таким образом, длиннее и оптически «мягче». В соответствии со своим предназначением переходная кривая должна переходить в последующую круговую кривую настолько плавно, насколько длиннее прямая и насколько шире поперечный профиль дороги. Эти рекомендации справедливы и к дорогам, у которых последовательность радиусов согласно п. 4.2.2 находится, по крайней мере, в благоприятной области и при движении по которой можно рассчитывать на равномерную скорость.
При невозможности соблюдения требований к последовательности величин радиусов становится необходимым, например, на длинных прямых сделать своевременное указание на последующую круговую кривую. В таких случаях целесообразно, в виде исключения, принять небольшой параметр клотоиды (А = R/3). В результате переход на кривую производит более «жесткий» эффект, водителю явно указывается последующее направление кривой, побуждая его к снижению скорости движения, в предположении своевременного распознавания им оптически жесткого перехода в последующем характере кривой.
4.3.3.2. Обратная клотоида
Обратная клотоида состоит из двух с противоположно направленной кривизной по отношению друг к другу ветвей клотоид, стыкуемых в точке с нулевой кривизной. Для каждой из обеих клотоид остаются справедливыми условия простой клотоиды (п. 4.3.3.1). В интересах гармоничного проложения трассы дороги и равномерного отгона поперечного уклона, особенно для дорог категорий А I и А II, обе ветви клотоиды должны иметь близкие по величине параметры. При неодинаковых параметрах и А2 ≤ 200 м для дорог категорий А I и А II и, по возможности, также и для дорог категорий А III, В I и В II должно выполняться следующее условие:
A 1 ≤ 1,5· A 2 (6)
где А1, А2 - параметры клотоид, м.
Величины радиусов в последовательности обеих круговых кривых, между которыми располагается обратная клотоида, следует принимать по рис. 4.
Для максимального учета местных ограничений и приближения к ним допустимы короткие прямые между двумя клотоидами. Чтобы получить при этом визуальное восприятие обратной клотоиды, длина промежуточной прямой не должна превышать величину, полученную по формуле (7). При неизбежно длинных прямых вставках следует следить за тем, чтобы кривизна в продольном профиле на этом участке была меньше кривизны в плане с целью исключения оптически неблагоприятных в профиле точек перегиба.
L 2 ≤ 0,08·(А 1 + A 2), (7)
где L2 - длина промежуточной прямой, м.
4.3.3.3. Овальная клотоида
Овальная клотоида представляет собой отрезок клотоиды, соединяющий две круговые кривые с односторонней кривизной. Круговые кривые должны находиться одна в другой, не касаться друг друга и иметь один центр кривизны. Для радиусов круговых кривых, между которыми размещается овальная клотоида, границы приведены на рис. 4. Для оптического восприятия овальной клотоиды она должна иметь угол поворота t ≥ 3,5 гон (3,15°).
Если две соединяемые круговые кривые находятся рядом или пересекаются, то сопряжение между ними следует найти посредством вспомогательной круговой кривой. Тогда возникает следующая последовательность: круговая кривая - овальная клотоида - круговая кривая (вспомогательная) - овальная клотоида - круговая кривая.
4.3.3.4. Коробовая клотоида
Коробовая клотоида состоит из последовательности клотоид односторонней кривизны, которые в местах сопряжения имеют одинаковые радиусы и общий тангенс. Из условия безопасности движения ее лучше не применять. Если же в стесненных условиях от ее применения нельзя отойти, то по условию динамики движения и, особенно для дорог категорий А I и А II, а, по возможности, и для дорог категорий А III, В I и В II, параметры последовательных клотоид не должны резко отличаться. Параметр наименьшей клотоиды не должен быть менее минимального значения, установленного в п. 4.3.2.
4.3.3.5. Стыкуемая клотоида
Стыкуемая клотоида состоит из двух простых клотоид ( п. 4.3.3.1) параметров А1, А 2, которые стыкуются друг с другом без промежуточной круговой кривой в точке с равными в ней радиусами R 1 = R 2. Поскольку стыкуемая клотоида в точке стыковки вызывает теоретически резкое изменение вращения рулевого колеса и этим - неравномерный характер движения, ее применение возможно только в исключительных случаях, например, на кривых с малыми углами поворота. Параметры обеих ветвей клотоид должны быть при этом, особенно для дорог категорий А I и А II, по возможности, одинаковыми (А1 - А2).
Минимальные стыкуемые радиусы коробовых клотоид для дорог группы А равны 450 м, для дорог категорий В I и В II - 250 м. Стыкуемые клотоиды с радиусом стыковки меньше минимальных значений следует исключать. При проложении трассы посредством применения стыкуемых клотоид значения их минимальных параметров принимают по п. 4.3.2, значения минимальных радиусов в точке стыковки для дорог всех категорий - по п. 4.2.2.
Исходя из требований обеспечения динамики движения и по причинам трудностей выполнения отгона поперечного уклона, обусловленный радиусом в точке стыковки поперечный уклон следует продлить на обе ветви клотоиды. Длина участка с постоянным поперечным уклоном определяется по формуле (8). Она распределяется по половине на обе клотоиды.
L конст. q = 0,3· V e, (8)
где Lконст - участок с постоянным поперечным уклоном q, м.
5. ПРОЕКТНЫЕ ЭЛЕМЕНТЫ В ПРОДОЛЬНОМ ПРОФИЛЕ
5.1. Продольный уклон
5.1.1. Применение
Для удовлетворения требованиям безопасности движения, экономии эксплуатационных затрат и энергии, уменьшения выбросов вредных веществ и обеспечения качества процесса движения продольные уклоны должны быть, по возможности, минимальными и не превышать 4%. С другой стороны, для снижения вмешательства в природный ландшафт и в городскую среду, для уменьшения строительной стоимости продольные уклоны должны, по возможности, согласовываться с рельефом местности.
5.1.2. Допустимые и рекомендуемые значения
5.1.2.1. Максимальный продольный уклон
Представленные в табл. 6 значения максимальных продольных уклонов по условию безопасности движения не должны быть превышены. Большие значения относятся к дорогам категорий В I и В II и принимают в расчет особые условия в пределах застроенных территорий.
Таблица 6
Максимальные продольные уклоны
|
Проектная скорость V e , км/ч |
Максимальный продольный уклон s max , %, для дорог |
|
|
группы А |
категорий В I / В II |
|
|
50 |
9,0 |
12,0 |
|
60 |
8,0 |
10,0 |
|
70 |
7,0 |
8,0 |
|
80 |
6,0 |
7,0 |
|
90 |
5,0 |
6,0 |
|
100 |
4,5 |
5,0 |
|
120 |
4,0 |
- |
При неизбежном применении уклона s ≥ 10% претерпевает превышение максимально допустимый косой уклон ( п. 7.2.1).
В пределах пересечений дорог в одном уровне следует, по возможности, исключать продольные уклоны более 4%, исходя из неблагоприятных условий организации примыканий, ограничения пути остановки и трогания.
На участках тоннелей для дорог группы А максимальные продольные уклоны должны ограничиваться величиной 4%. На протяженных участках максимальный продольный уклон не должен превышать 2,5%. В тоннелях большие уклоны способствуют:
• увеличению эмиссии (выхлопы отработавших газов);
• повышению опасности ДТП;
• быстрому распространению горящих жидкостей;
• снижению скорости движения грузовых автомобилей.
При превышении рекомендуемых значений продольных уклонов не исключен запрет на движение по тоннелю транспортных средств с опасным грузом.
Если при выбранном продольном уклоне для дорог группы А желательная скорость сообщения в дорожно-транспортной сети не может быть обеспечена из-за скорости расчетного грузового автомобиля на участке дороги, то следует проверить возможность ее достижения путем изменения поперечного профиля (устройство дополнительной полосы) или положения трассы.
5.1.2.2 . Минимальный продольный уклон и участок отгона поперечного уклона
Автомобильные дороги без бортового камня
Для автомобильных дорог без бордюра на участке отгона противоположных поперечных уклонов необходимо стремиться обеспечить минимальный продольный уклон s ≥ 0,7%, но лучше s ≥ 1,0%, во избежание появления пониженных мест для скопления воды на проезжей части. Для гарантированного обеспечения надлежащего водоотвода с проезжей части необходимо наличие между продольным уклоном и уклоном, образуемым за счет отгона поперечного уклона на переходных кривых, разности в 0,2% (лучше 0,5%) ( п. 7.3.2):
s - Δs ≥ 0,2% (лучше 0,5%), (9)
где s - продольный уклон проектной линии дороги, %;
Δs - нарастание (увеличение) продольного уклона за счет возвышения внешней кромки в конце отгона поперечного уклона (виража) и в начале круговой кривой по отношению к поперечному уклону в начале отгона на прямой (разность между отметками по внешней кромке проезжей части, отнесенная к длине участка отгона поперечного профиля, формула (17) п. 7.3.2), %.
Этим будет достигнуто то, что ни одна из обеих кромок проезжих частей не будет иметь уклон, обратный уклону проектной линии в продольном профиле. Необходимо стремиться обеспечить значение 0,5 % как величину допуска на неточность строительства покрытия.
В исключительных случаях, когда ось вращения не совпадает с серединой проезжей части ( п. 7.3.1), результирующийся из продольного уклона проектной линии по оси вращения и из продольного уклона по кромкам уклон по середине проезжей части должен быть s+Δ s≥0,7 %. Требование Норм и правил RAS- Ew обеспечения минимального косого уклона 0,5% может привести, однако, к его большим значениям.
Автомобильные дороги с бортовым камнем
Для дорог с бордюром продольный уклон по всем бортовым лоткам должен быть минимум s = 0,5%. Поэтому на всех участках отгона поперечного уклона проезжей части продольный уклон по оси проезжей части в пределах изменения поперечного уклона должен быть на 0,5% больше уклона, образуемого за счет отгона поперечного уклона, если отвод поверхностной воды с проезжей части не может быть обеспечен другими специальными водоотводными мероприятиями:
s – Δ s > 0,5% (10)
5.1.2.3. Минимальный продольный уклон на длинных мостах
Для обеспечения водоотвода с проезжей части в пределах мостового полотна необходимо проектировать проектную линию в продольном профиле так, чтобы можно было обеспечить минимальный продольный уклон 0,5 %.
5.1.3. Участки смены поперечного уклона при малых продольных уклонах
Если по топографическим или градостроительным данным минимальный продольный уклон нельзя получить даже путем смещения нулевого поперечного уклона по отношению к точке смены кривизны клотоид (обратная клотоида) ( п. 7.3.3), то участок изменения поперечного уклона надлежит выполнить с косым изменением поперечного уклона ( п. 7.2.3). Для исключения неблагоприятных мест для водоотвода с проезжей части можно использовать даже и отрицательный поперечный уклон ( п. 7.2.3).
5.2. Выпуклые и вогнутые вертикальные кривые
5.2.1. Применение
Проектирование выпуклых и вогнутых кривых осуществляется, как правило, в приближении к круговой кривой квадратичными параболами. Характерной для величины кривой является радиус кривизны Н в вершине параболы ( Приложение 6 RAS- L).
Для лучшего вписывания проектной линии в естественные формы рельефа в исключительных случаях могут быть применены в качестве выпуклых и вогнутых кривых другие виды кривых. Проектные элементы должны обеспечивать в любом случае достаточное расстояние видимости ( Приложение 10 RAS- L).
Выпуклые и вогнутые кривые соединяются, как правило, прямыми; они могут и стыковаться друг с другом. Для соединения двух выпуклых или двух вогнутых кривых короткими прямыми для дорог группы А необходимо руководствоваться положениями пространственного трассирования.
Радиусы выпуклых и вогнутых кривых должны назначаться таким образом, чтобы они вместе с элементами плана
• позволили получить гармоничное пространственное положение трассы;
• обеспечили высокую степень безопасности путем создания благоприятного для этого расстояния видимости;
• сохраняли ландшафт;
• вписывались, по возможности, полностью в местность и тем самым способствовали минимизации объемов работ и строительной стоимости.
Требования пространственного трассирования отступают, особенно для дорог категорий В I и В II, перед требованиями учета градостроительных особенностей.
Если при реконструкции и капитальном ремонте существующих дорог категорий В I и В II радиусы выпуклых кривых, удовлетворяющих условиям рельефа местности, оказываются меньше минимальных значений, а городские ограничения не позволяют произвести их увеличение до установленных значений, то, исходя из обеспечения безопасности движения, следует предпринять ограничение допустимой максимальной скорости (возможно только для условия мокрого покрытия).
5.2.2. Допустимые и рекомендуемые значения
Выпуклые и вогнутые кривые всегда рассчитываются в пространственном представлении трассы. Для каждого участка выпуклой кривой с учетом скорости V85 и среднего продольного уклона следует определить расстояние видимости до остановки ( раздел 8), принимая для этого расчетные высоты до заданных точек препятствий по табл. 17 ( Приложение 10 RAS- L).
В особом случае проложения трассы по прямой на плане принимают радиусы выпуклых кривых по табл. 7. Минимальные радиусы выпуклых кривых проявили себя в прошлом как достаточно надежные значения. Выемки в пределах выпуклых кривых оказывались не столь глубокими, а проектная линия могла вписываться в формы рельефа. Минимальный радиус выпуклой кривой получается на основе модели, представленной в Приложении 7 RAS- L. При соблюдении этих значений проверка на достаточное расстояние видимости до остановки для скорости V85 не требуется.
Таблица 7
Радиусы и минимальные радиусы выпуклых кривых на прямых участках при видимости встречного автомобиля для обгона на полном расстоянии видимости и его половине
|
Проектная скорость V е , км/ч |
Радиусы выпуклых кривых, м |
|
|
H k . min (при S h ) |
H k при 0,5· S u /при S u ) |
|
|
50 |
1400 |
7000 / 28200 |
|
60 |
2400 |
7800 / 30000 |
|
70 |
3150 |
8600 / 35000 |
|
80 |
4400 |
10300 / 40000 |
|
90 |
5700 |
12200 / 48000 |
|
100 |
8300 |
13000 / 52000 |
|
120 |
16000 |
- |
Примечание. Sh - расстояние видимости для остановки автомобиля, м; Su - расстояние видимости встречного автомобиля при обгоне, м.
Радиусы выпуклых кривых, при которых получаются расстояния видимости, находящиеся в пределах между половиной и полной длиной видимости при обгоне, обуславливают критические маневры обгона и поэтому на дорогах с одной проезжей частью должны быть исключены. Если предусматриваются запреты на обгоны, то необходимо обращать внимание на то, чтобы на этих участках обгона можно было бы уверено обгонять медленно движущиеся транспортные средства (например, сельскохозяйственную технику). Такие участки должны быть в проекте выделены в пикетаже и обозначены знаками.
Приведенные минимальные радиусы выпуклых кривых в отдельных случаях (например, пространственные кривые по Приложению 8 RAS- L или на коротких вертикальных закруглениях) могут быть уменьшены, если для выбранного закругления будет произведен расчет проверки достаточности расстояния видимости (пространственной) до остановки. Геометрические соотношения в продольном профиле между радиусом выпуклой кривой, расстоянием видимости до остановки при различном высотном положении точек препятствий представлены в Приложении 7 RAS- L.
Радиусы вогнутых вертикальных кривых из условия обеспечения оптической плавности должны быть не менее половины радиусов выпуклых кривых и не меньше значений, приведенных в табл. 8. Применение радиусов вогнутых кривых по табл. 8 обеспечивает достаточную видимость под путепроводами (подмостовой габарит 4,5 м и положение глаз водителя грузового автомобиля 2,5 м) и в темное время суток.
Таблица 8
Рекомендуемые значения радиусов вогнутых вертикальных кривых
|
Проектная скорость Ve , км/ч |
Минимальный радиус вогнутой вертикальной кривой H w . min , м |
|
50 |
500 |
|
60 |
750 |
|
70 |
1000 |
|
80 |
1300 |
|
90 |
2400 |
|
100 |
3800 |
|
120 |
8800 |
Приведенные минимальные радиусы вогнутых кривых обеспечивают сверх того оптически благоприятную проектную линию. При реконструкции существующих дорог и при условии наличия градостроительных ограничений могут назначаться и меньшие значения.
Для устранения кажущегося перелома в проектной линии при размещении выпуклых и вогнутых кривых при наличии малой разности в продольных уклонах длина тангенсов в продольном профиле должна соответствовать длине тангенсов криволинейных элементов в плане.
Минимальные длины тангенсов следует определять по следующим формулам:
|
Группа A : |
Tmin = V е , |
(11) |
|
Группа В: |
Tmin = 0,75· V е |
(12) |
где Tmin - минимальная длина тангенса, м;
V е - проектная скорость, км/ч.
Целесообразное соотнесение элементов продольного профиля с элементами плана дается в представлениях пространственного проложения трассы дороги.
5.2.3. Минимальный продольный уклон бортового лотка при смене уклона
На выпуклых и вогнутых кривых между противоположными продольными уклонами возникают в пределах вершины на длине, определяемой по формуле (13), продольные уклоны s ≤ 0,5%. На дорогах с бордюром в таких случаях необходимо обращать внимание на то, чтобы бортовой лоток имел минимальный продольный уклон. В противном случае необходимы дополнительные мероприятия по обеспечению водоотвода ( RAS- Ew 1987).
L = H/100, (13)
где L - длина участка с минимальными продольными уклонами, м;
Н - радиус выпуклой / вогнутой кривой, м.
6. ПРОСТРАНСТВЕННОЕ ПОЛОЖЕНИЕ ПОЛОТНА ДОРОГИ
6.1. Элементы пространственного положения дороги
Проложение дороги представляется в трех измерениях и поэтому должно рассматриваться в ее пространственном положении. Проектные проработки и графическое представление чертежей в проекте выполняются преимущественно раздельно на плане, в продольном и поперечном профилях. Благодаря наложению и совмещению горизонтальных и вертикальных проектных элементов совместно с поперечными профилями возникают представленные на рис. 6 пространственные элементы. Эти пространственные элементы и образующиеся при их чередовании последовательные виды пространственных элементов можно представлять в виде перспективных изображений или моделей. При этом перспективное изображение из положения глаз водителя является единственно приемлемым перспективным изображением для визуальной оценки транспортных качеств дороги.
|
Элемент в плане |
Элемент в продольном плане |
Пространственный элемент |
|
Прямая |
Прямая |
Прямая с постоянным уклоном |
|
Прямая |
Кривая |
Прямая на вогнутой кривой |
|
Прямая |
Кривая |
Прямая на выпуклой кривой |
|
Кривая |
Прямая |
Кривая с постоянным продольным уклоном |
|
Кривая |
Кривая |
Закругление на вогнутой кривой |
|
Кривая |
Кривая |
Закругление на выпуклой кривой |
Рис.6. Пространственные элементы при наложении прямых и кривых совместно с поперечным профилем
6.2. Пространственное представление полотна дороги
Ясное оптически ориентированное направление дороги является предпосылкой для ее достаточной безопасности и качества транспортного обслуживания. Оно достигается, если картина изображения дороги действует и воспринимается «спокойно», ее характер достаточно нагляден, своевременно распознаваем и однозначно понимаем.
Оптически ориентированное направление достигается, прежде всего, выделением полотна проезжей части; оно становится отчетливее, когда выделены и обозначены оптически чувствительные кромки проезжей части и разделение полос движения (например, разметкой).
Особое значение имеет придание направления кромкам на участках отгона поперечного уклона при уширениях или при расширениях проезжей части.
6.2.1. Элементы плана дороги
6.2.1.1. Прямая
Прямолинейные участки следует применять только в тех случаях, когда они предназначаются для рассредоточения транспортного потока или делают возможным хорошее приближение к рельефу местности. Неблагоприятный вид полотна дороги, обусловленный жесткостью прямой в плане, в пересеченной местности можно смягчить вертикальной вогнутой кривой большого радиуса (рис. 7); можно улучшить вид также посредством кривой в плане большого радиуса. Тогда в обоих случаях предоставляется возможность оценки направления движения автомобилей по левой полосе движения, а также и скорости движения встречных автомобилей. Имеющиеся у прямолинейных участков недостатки приведены в разделе 4.
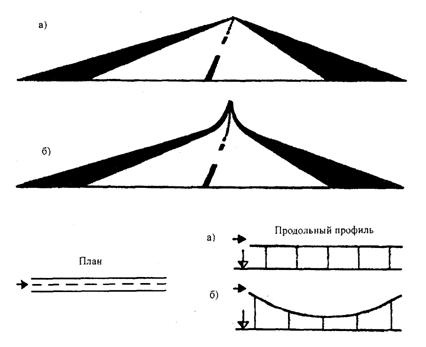
Рис. 7. Прямая в плане на равнинной поверхности (а) и на вогнутой кривой (б)
6.2.1.2. Круговые кривые
Короткие круговые кривые с малыми тангенсами, располагаемые между прямыми, воспринимаются в перспективном изображении из положения глаз водителя в виде излома (рис. 8), который можно устранить только посредством увеличения радиусов. Радиусы должны быть тем больше, чем меньше углы поворота.
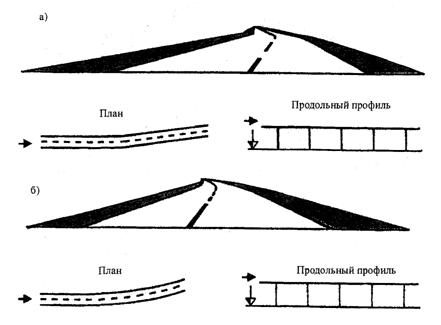
Рис. 8. Кромка проезжей части с оптическим переломом (а) и без него (б)
6.2.1.3. Последовательность элементов в плане
Величина следуемых друг за другом элементов в плане определяется посредством предварительно заданных соотношений радиусов и соотношений между переходными и круговыми кривыми ( п.п. 4.2, 4.3).
Безопасность движения автомобилей в транспортном потоке на криволинейной трассе с большим количеством кривых на единицу длины трассы существенно не снижается при наличии одной кривой меньшего радиуса. Высокая степень извилистости, обусловленная невысокой расчетной скоростью, не является фактором равнозначности повышенному риску возникновения ДТП. Определяющим для безопасности движения является устранение мест с неравномерностями (рис. 9). Поэтому как раз на участках малых и средних по величине радиусов необходимо соблюдать соотношения величин смежных радиусов.
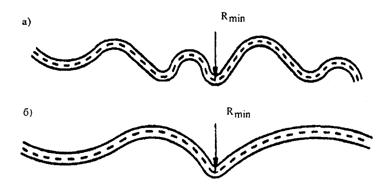
Рис. 9. Равномерно (а) и неравномерно (б) искривленные дороги в плане
6.2.2. Элементы в продольном профиле
6.2.2.1. Прямая
Прямая в продольном профиле представляет собой участок с постоянным продольным уклоном. Она не создает больших проблем в отношении пространственного направления дороги. Короткая прямая между двумя следующими друг за другом вогнутыми кривыми может восприниматься как выпуклая кривая и ее следует избегать (рис. 10, 11). Точно также короткая прямая между двумя следуемыми друг за другом выпуклыми кривыми может восприниматься как вогнутая кривая. На проявления такого рода в проектной линии следует особо обращать внимание на мостах.
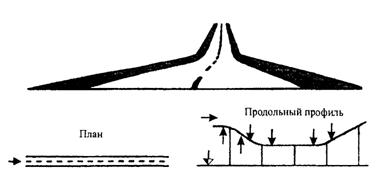
Рис. 10. Инородные элементы в продольном профиле, т.е. оптически неблагоприятный вид изображения кромки проезжей части с кажущимся образованием выпуклости
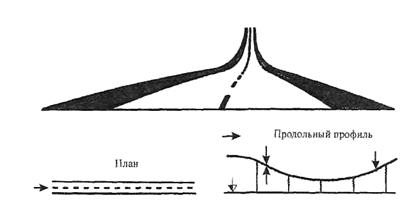
Рис. 11. Родственно близкое в профиле и плане изображение кромки проезжей части
6.2.2.2. Вогнутая кривая
Вогнутая кривая представляет собой элемент с ее наглядным оптическим направлением. Для достижения гармоничного проложения дороги следует избегать коротких вогнутых кривых между длинными участками с постоянным продольным уклоном. При этом не имеет значения, имеет ли трасса в плане прямую (оптическая точка излома, рис. 12) или является искривленной (чуждое плану изображение, рис. 13).
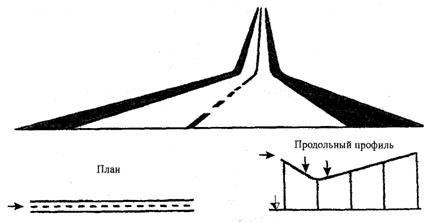
Рис. 12. Оптический излом на вогнутой кривой
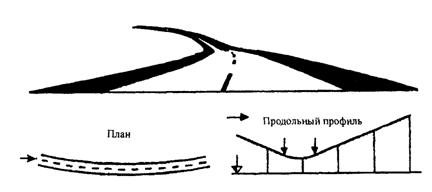
Рис. 13. Чуждое плану представление полотна дороги
6.2.2.3. Выпуклая кривая
Пространственное положение трассы на участке выпуклой кривой существенным образом определяет условия видимости. Выпуклые кривые с минимальными радиусами ограничивают глубину видимости.
6.2.2.4. Последовательность элементов в продольном профиле
Последовательность элементов в продольном профиле должна максимально приближаться к поверхности местности.
В холмистой местности для облегчения получения расчетом расстояния видимости радиус выпуклой кривой должен быть больше радиуса вогнутой кривой (рис. 14, п.п. 5.2.2, 8.1). Напротив, при незначительной разности высот (до 10 м) и на равнинной местности, исходя из обеспечения оптически удовлетворительного характера полотна дороги, радиусы вогнутых кривых назначаются больше по отношению к радиусам выпуклых кривых (при обеспечении наличия расстояния видимости, см. рис. 14).
Многократные изменения продольных уклонов на коротких выпуклых и вогнутых кривых на обозримом участке должны быть исключены благодаря плавному положению проектной линии.
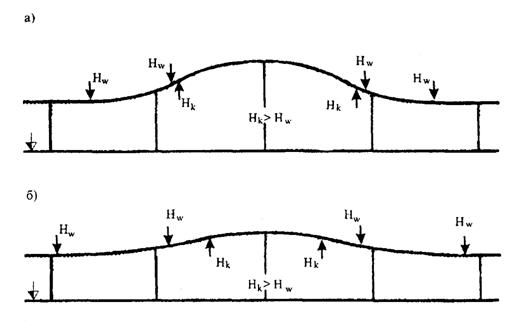
Рис. 14. Соотношение радиусов выпуклой (а) и вогнутой (б) кривой
6.2.3. Совмещение плана с продольным профилем
При совмещении вогнутых кривых и криволинейных элементов в плане можно получить в их совместном пространственном положении искаженные представления о полотне дороги водителем. Вогнутые кривые на кривых в плане предопределяют водителю плавное направление трассы, чем они фактически на самом деле являются. Поэтому соотношение радиусов кривых в плане и радиусов вогнутых кривых должно быть взаимно согласовано. Опыт показывает, что соотношение R/ H должно быть, по возможности, малым, не более чем 1/5-1/10.
Чем положе местность, тем больше должны быть радиусы выпуклых и вогнутых кривых по отношению к радиусам кривых в плане.
Гарантией оптически благоприятного вида направления дороги, удовлетворяющего условиям динамики движения и возможности технического выполнения поверхностного водоотвода, является нахождение точек изменения направления кривизны в плане и продольном профиле близко друг к другу (рис. 15, 16).
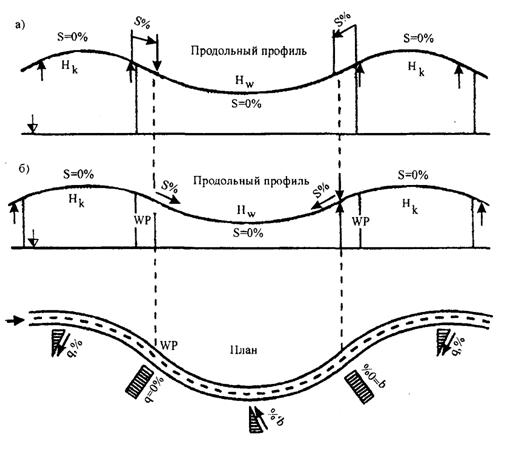
Рис. 15. Соотнесение элементов в плане и продольном профиле:
а - близкое взаимное положение точек изменения кривизны в плане и продольном профиле; б - совпадение точек изменения кривизны в плане и продольном профиле; WP - точка изменения направления кривизны в плане и продольном профиле
Это правило исходит из одинакового количества точек изменения направления кривизны в плане и продольном профиле, В зависимости от рельефа местности и других условий проложения трассы количество точек изменения кривизны может быть и различным.
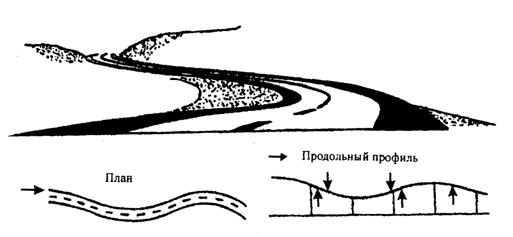
Рис. 16. Родственно близкое представление элементов в плане
Положение полотна дороги становится тогда благоприятным и с непрерывным характером его изменения, когда точки пересечения тангенсов кривых в плане и продольном профиле как можно близко располагаются друг к другу, а лишние кривые между ними отсутствуют. Исключение составляют в редких случаях резко искривленные кривые плана в вогнутых кривых. Из-за «эффекта вогнутости» они могут казаться больше, чем фактически являются. Во избежание в этом случае оптического искажения при совмещении вогнутой кривой и кривой в плане следует, по возможности, растянуть точки начала кривой в плане и вогнутой кривой друг от друга. Или необходимо начало вогнутой кривой настолько втянуть в пределы круговой кривой в плане, чтобы вершина круговой кривой была бы распознаваема, или выпуклую кривую вытянуть вперед настолько, чтобы только в ее конце начиналась круговая кривая в плане.
Рекомендуется проводить своевременную проверку взаимного положения кривых в плане и продольном профиле путем сравнения положения их тангенциальных полигонов.
Прежде всего, в холмистой и предгорной местности с повышенным продольным уклоном может оказаться предпочтительным размещение между концом выпуклой кривой и началом вогнутой кривой участка с постоянным продольным уклоном. Точку изменения кривизны в плане целесообразно тогда перенести ближе к началу вогнутой кривой с целью облегчения ее своевременного распознания водителем.
Если по местным условиям близкое положение точек изменения направления кривизны в плане и продольном профиле становится невозможным, то изменение направления должно быть четко распознаваемо в пределах фактического расстояния видимости. Круговая кривая в плане не должна быть скрыта в пределах выпуклой кривой (рис. 17), водитель должен своевременно распознать направление дороги и оценить, по возможности, также и кривизну.
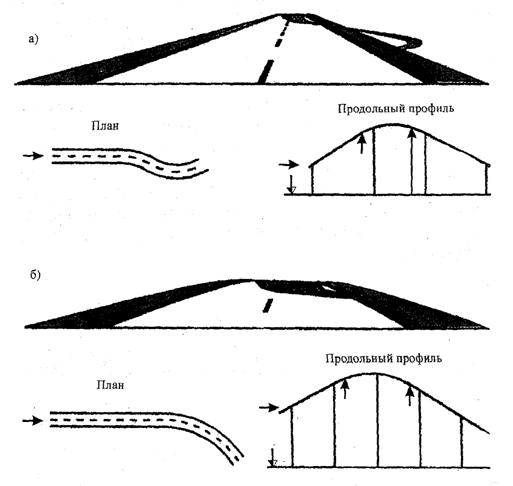
Рис. 17. Начало кривой в плане в пределах выпуклой кривой:
а - продолжение дороги теряется из виду и возникает снова далеко за выпуклой кривой; б - продолжение дороги теряется за выпуклой кривой
Поэтому распознаваемое изменение направления кривой в плане, отсчитываемое отточки начала переходной кривой, в пределах имеющегося расстояния видимости должно составлять не менее 3,5 гон (3,15°).
Выпуклости в проектной линии возникают, когда трасса следует расположенным близким друг от друга возвышениям поверхности без потери видимости всего участка (рис. 18). Несколько наглядных просматриваемых выпуклостей приводят к короблению проезжей части (рис. 19). Впечатление волнистости и коробления усиливается с увеличением ширины проезжей части и проявляется особенно опасно при движении в темное время суток (при свете фар).
Если трасса следует возвышениям поверхности местности с потерей частично ее видимости, то возникает впечатление ее провала ( рис. 20). При резком изменении кривизны в плане возникает впечатление ее скачка в сторону ( рис. 21). В таких случаях водитель может оказаться в заблуждении о фактическом характере трассы и о встречном движении. Такие искажения в восприятии полотна несут в себе большую опасность, прежде всего, при маневрах обгона.

Рис. 18. Волнистость полотна дороги в продольном профиле
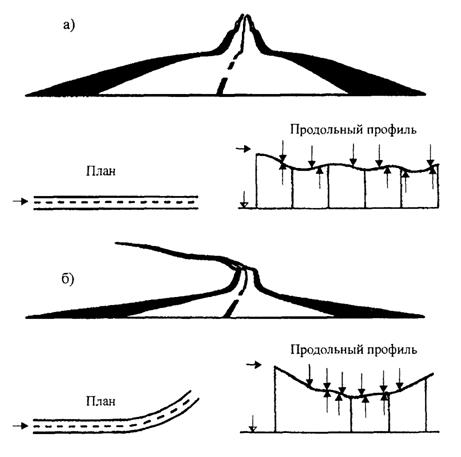
Рис. 19. Коробление полотна дороги на прямолинейном (а) и криволинейном (б) участках
Пересечения и примыкания из соображений их распознания и наглядности должны располагаться, по возможности, в пределах вогнутых кривых ( рис. 22). Если это по условиям рельефа местности для обеих дорог не представляется возможным, по крайней мере, следует выполнить проектную линию с вогнутой кривой на дороге второстепенного значения.
Таким образом, на первом месте находится видимость второстепенной дороги на точку, на которой должно обеспечиваться право преимущественного проезда, на втором месте - видимость до остановки автомобиля, движущегося с более высокой скоростью по главной дороге.
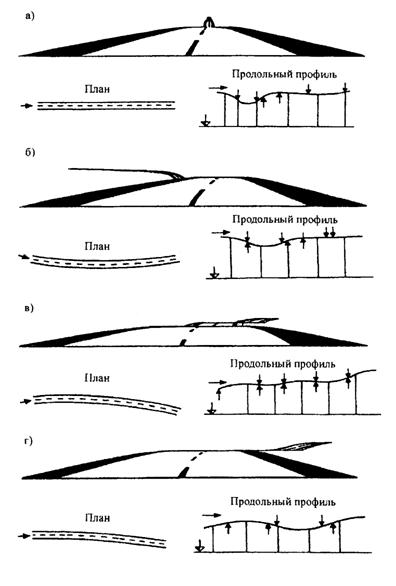
Рис. 20. Провалы полотна дороги:
а - на прямой; б - на кривой; в - мелкие провалы; г – глубокий провал
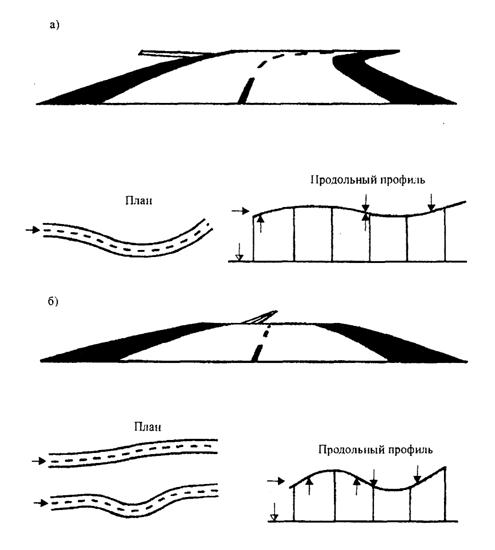
Рис. 21. Скачки полотна дороги: а - скачок; б - скачок со смещением
Распознаваемость пересечений и примыканий можно усилить подходящими для этого средствами (посадкой зеленых насаждений, установкой направляющих устройств, расстановкой указателей и знаков). Следует обеспечить необходимые условия видимости.
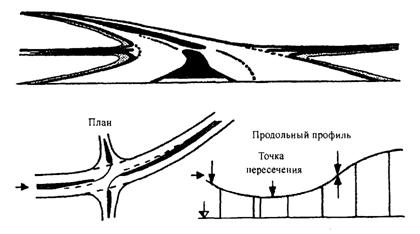
Рис. 22. Пересечение дорог в одном уровне на вогнутой кривой
Искусственные сооружения должны органически входить в проектную линию; следует избегать плоского вида полотна дороги в виде доски (рис. 23,24) (п. 6.2.2.1).
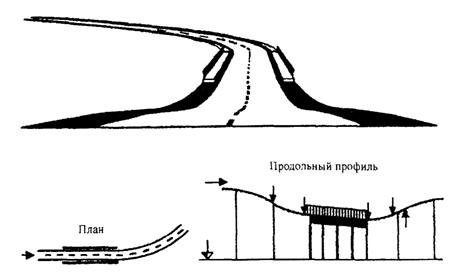
Рис. 23. Плоское восприятие полотна сооружения в виде доски
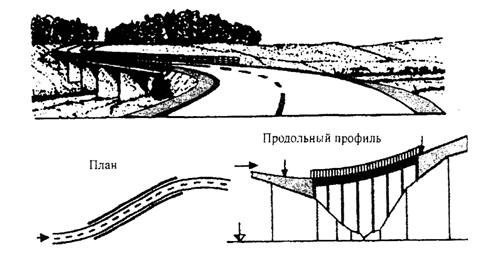
Рис. 24. Гармоничное вчленение сооружения в проектную линию
Для своевременного распознания больших мостов водитель при обстоятельствах может ориентироваться на изменяющиеся условия (например, боковой ветер).
Оптически особенно неблагоприятно выглядят искусственные сооружения, скрывающие начало кривой. Поэтому в пределах сооружения трасса должна быть уже отчетливо искривленной (рис. 25,26).
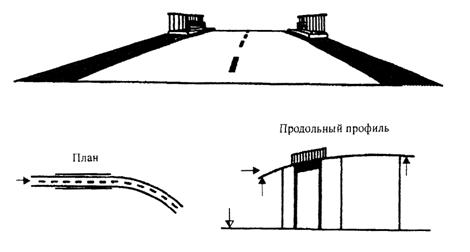
Рис 25. Сооружение на прямолинейном участке
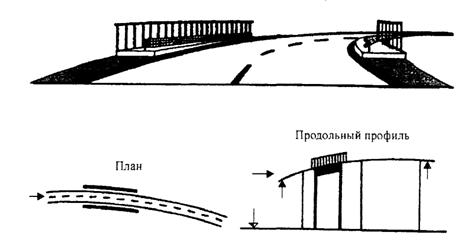
Рис. 26. Сооружение на криволинейном участке
7. ПРОЕКТНЫЕ ЭЛЕМЕНТЫ В ПОПЕРЕЧНОМ ПРОФИЛЕ
7.1. Поперечный уклон на прямой
7.1.1. Поперечный уклон проезжей части
Необходимый для водоотвода поперечный уклон проезжей части на прямой следует выполнять по рис. 27, где знаком «*» помечены исключительные случаи применения поперечных уклонов при реконструкции существующих дорог. К проезжей части относятся полосы движения и боковые полосы.
Минимальный и рекомендуемый поперечный уклон проезжей части на прямых составляет для дорог всех категорий
q min = 2,5% (14)
Для дорог с одной проезжей частью с двумя и тремя полосами на прямой применяется, как правило, односторонний поперечный уклон.
При реконструкции существующих дорог в исключительных случаях может оказаться экономичнее и двухсторонний поперечный профиль.
Раздельные проезжие части дорог всех категорий на прямолинейных участках устраиваются с односторонним поперечным уклоном, водоотвод при этом обычно производится на внешнюю сторону.
|
|
|
|
|
|
|
|
|
|
|
|

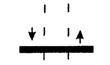
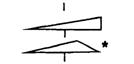

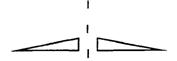
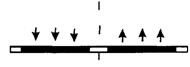
Рис. 27. Виды поперечного уклона на прямой в плане
7.1.2. Поперечный уклон других элементов поперечного профиля на прямой
Поперечный уклон других элементов поперечного профиля регулируется п. 2.6 части «Поперечные профили автомобильных дорог» ( RAS- Q).
7.2. Поперечный уклон на круговой кривой
7.2.1. Поперечный уклон проезжей части
Исходя из динамики движения, поперечный уклон на кривой необходимо располагать к внутренней стороне кривой. Максимальный поперечный уклон составляет
q max = 8,0%. (15)
Необходимо контролировать соблюдение максимального косого уклона 10 % для исключения скольжения автомобилей при гололеде.
В случаях невозможности применения максимальных поперечных уклонов по причине увеличения косого уклона при больших продольных уклонах становится необходимым соответственно увеличение радиусов кривых.
Максимальный поперечный уклон может быть применен для лучшего распознания кривой также и независимо от скорости V85, радиус которой находится ниже рекомендуемой в п. 4.2.2 последовательности.
Минимальный поперечный уклон на круговой кривой из условия обеспечения водоотвода должен быть равен поперечному уклону на прямой
q min = 2,5%. (16)
Соотношения радиуса круговой кривой, поперечного уклона и скорости V85 представлены на рис. 28. Полученные на основе рис. 28 поперечные уклоны могут быть округлены до 0,5%.
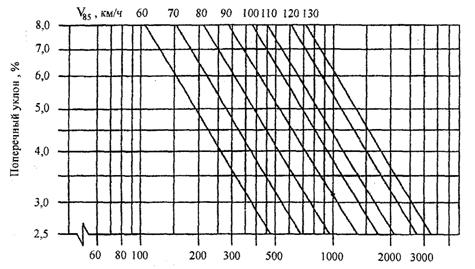
Рис. 28. Поперечные уклоны в зависимости от скорости V 85 и радиусов кривых в плане (рассчитаны по Приложению 3 RAS - L )
Для круговых кривых с очень малыми углами поворота полная величина поперечного уклона должна быть обеспечена на той их длине, по которой можно проехать с проектной скоростью V e в течение 2 с.
7.2.2. Поперечный уклон других элементов в поперечном профиле на круговой кривой
Дополнительные полосы для движения и укрепленные боковые полосы должны иметь на кривых в зависимости от направления и величины такой же поперечный уклон, что и проезжая часть (п. 2.6 Приложения RAS- Q).
Как исключение, допускается образование гребня в поперечном сечении на конечном участке отмыкания съезда между ним и сквозной проезжей частью, если этого требует размещение участка отгона поперечного уклона на переходной кривой съезда. Разность между поперечными уклонами сквозной проезжей части и отмыкающего съезда должна, однако, не превышать 5 % в пределах между сечениями расхождениями кромок их проезжих частей и разделением их укрепленных обочин (в треугольнике разделения проезжих частей). Участок отгона поперечного уклона может быть, при необходимости, настолько продлен на переходной кривой отмыкания съезда, чтобы уже в ее начале был достигнут поперечный уклон q = 0 %. Для участков примыкания съездов к дорогам остаются справедливыми эти положения.
7.2.3. Поперечный уклон в направлении внешней стороны кривой
Поперечный уклон к внешней стороне кривой следует, как правило, исключать. В особых случаях на дорогах с двумя проезжими частями, например на участках пересечений, примыканий, или для устранения мест с плохо решаемым водоотводом в пределах неблагоприятного продольного уклона на кривой допускается поперечный уклон во внешнюю сторону. Для проезжих частей с асфальтобетонным покрытием поперечный уклон составляет q =-2,5 %. Этим еще гарантируется водоотвод на внешнюю сторону даже при возможном образовании колейности. Из-за необходимости обеспечения требуемого сцепления радиусы кривых для поперечных уклонов на внешнюю сторону не должны быть меньше представленных в табл. 9 минимальных значений, которые получены на основе Приложения 3 RAS- L.
При односторонней кривизне следуемых последовательно кривых изменение направления поперечного уклона ни в коем случае не допускается.
Таблица 9
Минимальные радиусы круговых кривых для устройства поперечного уклона на внешнюю сторону
|
Скорость V 85 , км/ч |
Минимальный радиус круговых кривых R min , м, для поперечных уклонов |
|
|
q = -2,5 % |
q = -2,0 % |
|
|
70 |
600 |
550 |
|
80 |
950 |
850 |
|
90 |
1400 |
1300 |
|
100 |
2100 |
1900 |
|
ПО |
3000 |
2600 |
|
120 |
4100 |
3500 |
|
130 |
5500 |
4600 |
7.3. Отгон поперечного уклона
7.3.1. Применение
Изменение поперечного уклона проезжей части производится на участке переходной кривой. В пределах этого участка выполняется взаимное изменение положения кромок проезжей части и поверхность полотна дороги претерпевает вращение. Изменение поперечного уклона на дорогах с одной проезжей частью осуществляется, как правило, вращением поверхности полотна проезжей части вокруг ее оси (рис. 29, случай 1). На дорогах с двумя проезжими частями вращение производится, как правило, вокруг осей каждой из них (рис. 29, случай 2).
В исключительных случаях на дорогах с одной проезжей частью вращение может происходить относительно кромки (рис. 29, случай 3).
То же в исключительных случаях, например, при узкой ширине центральной разделительной полосы, при устройстве пересечений и примыканий в одном уровне на кривых или на переездах через центральные разделительные полосы проезжие части могут претерпевать на дорогах с двумя проезжими частями вращение относительно кромок у разделительной полосы (рис. 29, случай 4) или относительно оси дороги (рис. 29, случай 5).
|
Типовой случай |
1 |
|
|
2 |
|
|
|
Исключительный случай |
3 |
|
|
4 |
|
|
|
5 |
|
|
|
6 |
|




Рис. 29 . Положение осей вращения проезжей части
Для расчетных скоростей Ve = 100(120) км/ч раздельные проектные линии в продольном профиле для каждой из проезжих частей могут способствовать экономичному решению на участках изменения поперечного профиля. Ось вращения проезжей части, которая показывает прохождение нулевого положения поперечного уклона, находится вне середины (рис. 29, случай 6). Величина отклонения от середины получается из требований: s-Δ s ≥ 0 % по кромке проезжей части, s+Δ s ≥ 0,7 % по середине проезжей части и максимального значения Δ s = 0,9 %.
При наличии переходной кривой изменение поперечного уклона происходит в ее пределах независимо от того, какой тип поперечного уклона принят (односторонний или двухсторонний) и относительно какой оси происходит вращение полотна проезжей части. Наложение нарастания продольного уклона на прямую или на круговую кривую следует не допускать.
В исключительных случаях при отсутствии переходной кривой изменение поперечного уклона на последовательности элементов прямая - круговая кривая должно производиться наполовину перед и наполовину за точкой стыковки обоих элементов. При наличии обоснования изменение поперечного уклона может выполняться полностью в пределах прямой или полностью на круговой кривой.
7.3.2. Допустимые и рекомендуемые значения
Нарастание продольного уклона Δs представляет собой разность между продольными уклонами кромки проезжей части и осью вращения и определяется по формуле
![]() (17)
(17)
где Δs - нарастание (увеличение) продольного уклона (за счет изменения поперечного уклона на участке отгона до величины на круговой кривой), %;
q e - поперечный уклон проезжей части в конце участка отгона поперечного уклона, %;
qa - поперечный уклон проезжей части в начале участка отгона поперечного уклона ( qa подставлять с отрицательным знаком при направлении, противоположном qe), %;
Lv - длина участка отгона поперечного уклона, м;
а - расстояние от оси вращения до кромки проезжей части, м.
Для устранения в пределах переходной кривой слишком быстрого изменения (подъема) поперечного уклона, который неблагоприятно отражается на динамике движения и на оптическом восприятии полотна дороги, максимальные значения нарастания продольного уклона Δ smax не должны превышать значения, приведенные в табл. 10.
Таблица 10
Допустимые значения нарастания продольного уклона
|
Проектная скорость V e , км/ч |
Нарастание продольного уклона |
||
|
Δs max , %, при |
Δs min , %* |
||
|
а < 4,00 м |
а ≥ 4,00 м |
||
|
50 |
0,50-а |
2,0 |
0,10·а (≤ Δ s max ) |
|
60-70 |
0,40-а |
1,6 |
|
|
80-90 |
0,25-а |
1,0 |
|
|
100-120 |
0,225-а |
0,9 |
|
* Только при q ≤ 2,5 %
Минимальная длина участка изменения поперечного уклона L рассчитывается по формуле (18) с учетом максимального увеличения продольного уклона Δs min по табл. 10 и расстояния «а» кромки проезжей части от оси вращения
![]() (18)
(18)
Смягчение образующихся переломов в линии продольного профиля по кромкам в начале и конце участка изменения поперечного уклона посредством размещения в них вертикальных круговых кривых не требуется, так как максимальные разности находятся чаще всего в пределах величины допуска при строительстве.
7.3.3. Учет поверхностного водоотвода с проезжей части
В пределах участков изменения поперечного уклона нарастание продольного уклона на участке от + qmin через 0 до - qmin не должно быть меньше минимального значения продольного уклона Δ smjn по табл. 10. Если же это происходит, то необходимо изменение поперечного уклона сделать по частям, т.е. на участке от + q min до - q min увеличение выполнить с минимальным продольным уклоном Δ smin. Помимо этого продольный уклон проектной линии и минимальное нарастание продольного уклона необходимо привести во взаимное соответствие для обеспечения водоотвода согласно п. 5.1.2.2.
|
|
|
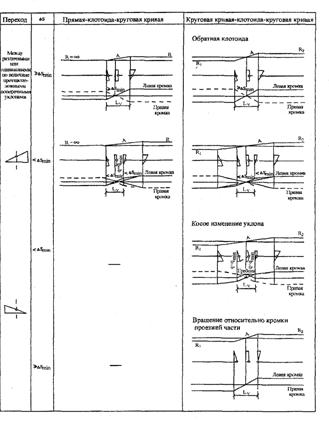
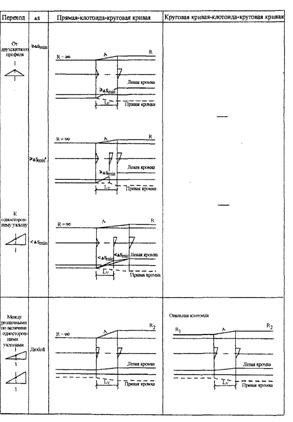
Рис
30 .
Способы изменения поперечного уклона проезжей части: вращения
0 = ось вращения
На оставшемся участке переходной кривой производятся дальнейшее изменение поперечного уклона и поднятие кромки до достижения в начале круговой кривой требуемого поперечного уклона (рис. 30 для Δ s < Δ smjn, а также рис. 39, Приложение 5 RAS- L). Знаком «*» на рис. 30 показано преимущество в строительном исполнении - короткий гребень по оси проезжей части, но более длинный участок с уклоном qmin на переходной кривой.
Если в особо стесненных условиях на участке смены кривизны клотоиды нельзя получить достаточный продольный уклон, то точку с нулевым поперечным уклоном следует сместить по отношению точки смены кривизны на дорогах группы А на длину L = 0,1·А, на дорогах категорий В I и В II на длину L = 0,2·А. Это условие справедливо и для последовательности элементов прямая - клотоида - круговая кривая.
Другой возможностью устранения мест с необеспеченным водоотводом является создание косого изменения поперечного уклона на участке от + qmjn через 0 до - qmin (рис. 30, а также рис. 40 Приложения 5 RAS- L).
Такое решение затруднительно в техническом выполнении при строительстве, так как работы должны производиться вручную. Следствием этих трудностей является и сложность выполнения требований по должному уплотнению.
Косое изменение поперечного уклона может быть выполнено таким образом, что поверхность проезжей части повсеместно, кроме участка скругления гребня, будет иметь благоприятный для водоотвода минимальный поперечный уклон q = 2,5% на длине из условия динамики движения
Lv = 0,1·B·V e. (19)
Косое изменение поперечного уклона распространяется также и на укрепленный участок обочины.
Для дорог с бортовым камнем может быть целесообразным производить изменение поперечного уклона путем вращения относительно внутренней кромки проезжей части, если в другом случае, например, при наложении уклонов s и Δ s продольный уклон лотка у борта становится меньше sr = 0,5 %.
7.3.4. Способы изменения поперечного уклона проезжей части
Имеются следующие представленные на рис. 30 в деталях исполнения основные способы изменения поперечного уклона проезжей части.
Изменение поперечного уклона всех дополнительных укрепленных полос, прилегающих к проезжей части, производится также на длине переходной кривой или на соответствующем переходном участке проезжей части. Для возникающих при этом увеличений продольных уклонов полотна отсутствуют какие-либо допустимые значения.
Если при наличии дополнительных укрепленных боковых полос выполняется косое изменение поперечного уклона, то становится необходимым специальное представление чертежа в продольном профиле.
7.3.5. Особые случаи изменения поперечного уклона
Для возвышения кромки при отгоне поперечного уклона при одновременном уширении проезжей части или при ее расширении определяющим остается нарастание продольного уклона на неуширяемой проезжей части. Для нарастания продольного уклона по кромке проезжей части в пределах переходного участка отсутствуют особые допустимые значения.
7.4. Уширение проезжей части
При смене поперечного профиля, при изменении ширины центральной разделительной полосы, при устройстве разделения проезжих частей, дополнительной полосы, отмыкающего или примыкающего съезда транзитные полосы движения должны претерпеть изменения в соответствии с изменяемым поперечным профилем. Для достижения оптически благоприятного вида направления транзитных проезжих частей изменение уширения в пределах малых радиусов должно осуществляться на внутреннюю сторону кривой, в пределах проложения трассы с большими элементами - в обе стороны от оси дороги. Кромки проезжей части следует трассировать, по возможности, самостоятельно, независимо от оси дороги, или устанавливать их положение посредством двух составных сопрягающихся между собой квадратных парабол в виде S-образных кривых ( Приложение 9 RAS- L).
Длина отгона уширения для дорог всех групп категорий определяется по формуле
![]() (20)
(20)
где Lz - длина отгона уширения, м;
i - величина уширения, м.
Другие детали для получения оптически благоприятно воспринимаемой длины отгона уширения Lz можно найти в Нормах и правилах по проектированию пересечений и примыканий дорог RAS- K.
Для уширения проезжей части во взаимосвязи с устройством дополнительных полос длина отгона определяется в части «Поперечные профили автомобильных дорог» ( RAS- Q).
7.5. Уширение проезжей части на кривой
При движении по кривой задние колеса автомобиля описывают кривую меньшего радиуса, чем передние колеса. Таким образом, на кривой ширина проезжей части должна быть на величину i больше, чем на прямой. При количестве « n» полос движения необходимое уширение проезжей части рассчитывается по формуле
![]() , (21)
, (21)
где D - расстояние между осями плюс длина выступа спереди, м;
Ra - радиус внешней круговой кривой, м;
i - уширение проезжей части, м;
n - количество транзитных полос. Подлежат исследованию изменение угла поворота (формула (22)) и длина кривой участка уширения ( формула (48), Приложение 9 RAS- L).
Для различных случаев движущихся навстречу автомобилей необходимое уширение определяется как сумма уширений полос движения проезжей части. Однако полное уширение проезжей части достигается лишь тогда, когда при переходе прямая - клотоида - круговая кривая длина участка отгона уширения превышает длину, рассчитанную по формуле (48) (Приложение 9 RAS- L).
В качестве параметра D следует применять следующие значения, м:
Легковой автомобиль 4,00
Грузовой автомобиль 8,00
Грузовой автопоезд 10,00
Автобус 1 (стандартный маршрутный автобус) 8,50
Автобус 2 (сочлененный автобус) 9,00
Автобус 3 (большой междугородный автобус) 11,70
Для определения уширения проезжей части рекомендуется случай встречи грузовой автомобиль - грузовой автомобиль (табл. 11).
Таблица 11
Уширение проезжей части на кривой
|
Рекомендуемый случай встречи автомобилей |
Уширение проезжей части с двумя полосами движения ( n =2) |
||
|
|
i , м |
В ≤ 6,0 м |
В > 6,0 м |
|
Lz / Lz |
50·n R |
30 < R ≤ 400 |
30 < R ≤ 200 |
|
Автобус 2/Автобус 2 |
40·n R |
30 < R ≤ 320 |
30< R ≤160 |
Полное уширение проезжей части i max требуется только в случае, когда угол изменения направления до достижения полного уширения проезжей части ( i max) превзойдет значение γ max, определяемое по формуле (22). Промежуточные значения для γ факт < γ м ax . i вычисляются по формулам (23) и (24):
![]() (22)
(22)
![]() (23)
(23)
 (24)
(24)
где i - требуемое уширение проезжей части, м;
γ факт - фактический угол поворота, гон;
γ max . i - угол поворота по достижении уширения imax, гон;
р - понижающий коэффициент.
Величиной уширения, полученной расчетным путем при ширине проезжей В ≤ 6,0 м менее 0,25 м и при В > 6,0 м - менее 0,5 м, можно пренебречь. Необходимые для определения уширения проезжей части расчеты относятся по всем полосам движения к оси проезжей части. Уширение проезжей части i производится к внутренней кромке, т.е. на внутреннюю сторону полосы движения, исключая серпантины.
Переход от нормальной ширины проезжей части на прямой к увеличенной на величину i ширине в поперечном профиле производится на круговой кривой согласно Приложению 9 RAS- L на всех трех элементах в плане.
7.6. Серпантины
На серпантинах, применяемых в сложных топографических условиях, необходимы очень большие уширения проезжей части из-за малых кривых в плане. Поэтому серпантины проектируются только из условий ограничения геометрии полотна дороги и освобождаются от динамических расчетов на остальном участке дороги. Здесь не требуется гармоничное сочетание последовательности расчетных элементов и соблюдение допустимой последовательности радиусов круговых кривых.
Поскольку водитель в зависимости от окружающего ландшафта и условий видимости может не ожидать возможного появления очень малых радиусов по трассе с обычными геометрическими характеристиками, то серпантины необходимо начинать преимущественно с размещения в начале обратной кривой. Кроме того, необходимо заставить обратить внимание на резкое изменение геометрических характеристик соответствующими указателями и знаками. Обеспечение свободной зоны видимости улучшает движение транспортного потока.
Минимальные радиусы для оси проезжей части Rmin = 12,5 м и для внутренней кромки проезжей части Rmin = 5,3 м не должны быть меньше. Для параметра переходной кривой рекомендуются пределы по формуле
R ≤ A ≤ 1,2·R. (25)
Приведенные в п. 7.5 правила перехода от нормального поперечного профиля к уширенному могут быть применены на серпантинах только до величины радиуса R =30,0 м. Для малых радиусов кривых до R = 12,5 м необходимо применение конструктивного решения в виде «ведомой» кривой (по очертанию заднего внутреннего колеса расчетного автомобиля при проезде кривых малых радиусов). Если, исходя из транспортного значения дороги, необходимо сделать возможным разъезд по одному из основных случаев даже в пределах серпантина, уширения проезжей части должны быть произведены раздельно для каждой полосы движения.
Необходимо в пределах серпантина постоянно руководствоваться уменьшением продольного уклона с целью облегчения движения по кривым малого радиуса.
8. ПРОЕКТНЫЕ ЭЛЕМЕНТЫ ВИДИМОСТИ
8.1. Требуемые расстояния видимости
Безопасность движения и качество обслуживания транспортного потока связаны с обеспечением минимально необходимого расстояния видимости.
Требуемое расстояние видимости по условию остановки имеет своей задачей не только создание возможности своевременной остановки автомобиля, но и является, подобно расчетной скорости, регулирующим элементом в проектных решениях, роль которого не ограничивается непосредственно действующим динамическим расчетом, а проявляется в предоставлении надежной своевременной информации водителю, которая является решающим звеном для оценки условий видимости дорог с одной и двумя проезжими частями всех категорий.
Требуемое расстояние видимости при обгоне должно гарантировать выполнение уверенного обгона. Оно дополнительно определяет условия видимости для двухполосных дорог группы А, используемых для встречного движения. Для дорог категорий В I и В II расстояния видимости для обгона имеют второстепенное значение.
8.1.1. Требуемые расстояния видимости для остановки автомобилей
В качестве расстояния видимости для остановки автомобилей характерным представляется участок S h который является необходимым водителю, движущемуся со скоростью V85, чтобы остановить автомобиль перед неожиданно появившимся на проезжей части препятствием. Это расстояние состоит из пути, проезжаемого в течение времени реакции водителя и приведения в действие тормозной системы, и непосредственно тормозного пути ( Приложение 10 RAS- L).
Требуемое расстояние видимости для остановки автомобиля может быть определено по рис. 31. При этом применяются усредненные значения продольных уклонов, которые определяются по отдельным участкам.
8.1.2. Требуемые расстояния видимости встречного автомобиля для обгона
В качестве расстояния видимости для обгона характеризуется участок Su , который является необходимым для уверенного выполнения маневра обгона. Это расстояние может быть получено для внегородских дорог из табл. 12. Для дорог категорий В I и В II из-за наличия поворотного движения не имеется оснований для обеспечения достаточного расстояния видимости для обгона, поэтому оно здесь не принимается во внимание.
Расстояния видимости, которые находятся в пределах между половиной и полной длиной расстояния видимости для обгона, провоцируют опасные маневры обгона и проявляются негативно на безопасности движения.
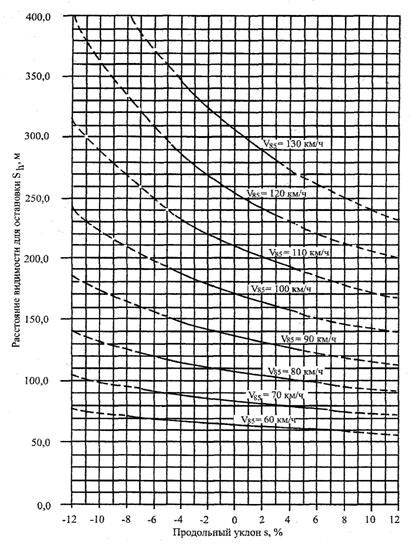
Рис. 31 . Необходимое расстояние видимости для остановки автомобилей
Если в пределах критических участков возникает необходимость в установке указателей запрета на обгон, то следует иметь в виду, что медленно движущиеся транспортные средства (например, сельскохозяйственная техника) можно при этом уверенно обгонять. Поэтому предписания на запрет обгонов не исключают возможность обгона путем установки дополнительного знака.
При расстояниях видимости, близких к половине расстояния видимости для обгона, возможны проблемы. С учетом пространственного положения дороги могут быть получены в действительности расстояния видимости, которые превышают расстояния видимости, обеспеченные на выпуклой кривой (при наличии прямой в плане). Поскольку эти расстояния видимости уже попадают в неблагоприятные пределы между половиной и полным расстоянием видимости для обгона, то из условия обеспечения безопасности движения настоятельно рекомендуется определение пространственной дальности видимости.
Таблица 12
Требуемое расстояние видимости встречного автомобиля при обгоне для дорог группы А
|
Скорость V 85 , км/ч |
Расстояние видимости встречного автомобиля при обгоне S u , м |
|
60 |
475 |
|
70 |
500 |
|
80 |
525 |
|
90 |
575 |
|
100 |
625 |
8.2. Фактические расстояния видимости для остановки и встречного автомобиля для обгона
Фактические расстояния видимости для остановки и встречного автомобиля для обгона получаются из проложения дороги, поперечного профиля и придорожного окружения ( Приложение 10 RAS- L).
Фактические расстояния видимости, представляемые раздельно для каждого направления движения на основе построения графиков дальности видимости, сравниваются с требуемыми расстояниями видимости ( Приложение 10 RAS- L). При этом следует выполнить следующие требования:
• расстояние видимости для остановки должно быть обеспечено для всех дорог на всей длине;
• доля участков с возможностью выполнения обгона в качестве рекомендуемого значения должна составлять в среднем 20-25 %. Распределение этих участков по совокупной длине должно быть равномерным. Следует учитывать, что значительная доля участков с наличием расстояния видимости для обгона из-за запрета на обгон или из-за высокой плотности движения не сможет быть использована для обгона. Если фактическая доля в расстояниях видимости для обгона меньше указанной выше минимальной доли и по условиям защиты природной среды или экономии она может быть достигнута лишь с большим трудом посредством изменения проложения трассы, то достаточные возможности для обгона можно создать устройством дополнительной полосы движения. Участки дороги с таким решением следует включать в долю участков с достаточным расстоянием видимости для обгона;
• дорога, согласно положениям для пространственного трассирования, должна в своей целостности быть обозримой и понятной.
В сохраняемой свободной зоне видимости должны быть устранены полностью все помехи (например, паркующиеся автомобили, ограждения на участках примыканий и т.п.) до высоты луча видимости. Рядные свободные посадки деревьев, а также отдельные деревья и кустарники могут оставаться в зоне видимости, если их помеха для видимости незначительная, и они служат оптическому ориентированию направления полотна дороги.
9. СВОДНЫЕ ДАННЫЕ И ТАБЛИЦА ОСНОВНЫХ ГЕОМЕТРИЧЕСКИХ ЭЛЕМЕНТОВ И ИХ ДОПУСТИМЫХ ЗНАЧЕНИЙ
Сводные данные и таблица основных проектных геометрических элементов и их допустимых значений приведены в табл. 13.
Таблица 13
Сводная таблица основных проектных геометрических элементов и их допустимых значений
|
Геометрические элементы |
Пункт RAS - L |
Группа дорог |
Основная проектная скорость |
Допустимые значения скорости, км/ч |
|||||||
|
50 |
60 |
70 |
80 |
90 |
100 |
120 |
|||||
|
План дороги |
Максимальная длина прямой L max м |
4.1.2 |
А |
V e |
- |
1200 |
1400 |
1600 |
1800 |
2000 |
2400 |
|
Минимальная длина прямой L min , м |
4.1.2 |
А |
V e |
- |
360 |
420 |
480 |
540 |
600 |
720 |
|
|
Минимальный радиус кривой R min „, м |
4.2.2 |
А,В |
V e |
80 |
120 |
180 |
250 |
340 |
450 |
720 |
|
|
Минимальный параметр клотоиды А min , и |
4.3.2 |
А, В |
V e |
30 |
40 |
60 |
80 |
110 |
150 |
240 |
|
|
Минимальный радиус кривой при поперечном уклоне к внешней стороне ( q = -2,0 %) R min , м |
7.2.3 |
А, В |
V 85 |
- |
- |
550 |
850 |
1300 |
1900 |
3500 |
|
|
Продольный профиль |
Максимальный продольный уклон s max , % |
5.1.2 |
А В |
V e |
9,0 |
8,0 |
7,0 |
6,0 |
5,0 |
4,5 |
4,0 |
|
12,0 |
10,0 |
8,0 |
7,0 |
6,0 |
5,0 |
- |
|||||
|
Минимальный продольный уклон на участке изменения поперечного уклона s min , % |
5.1.2 |
А, В |
- |
0,7 ( s - Δs ≥ 0,2 % без бордюра) |
|||||||
|
Минимальный радиус выпуклой кривой H kmin , м |
5.2.2 |
А, В |
V e |
1400 |
2400 |
3150 |
4400 |
5700 |
8300 |
16000 |
|
|
Минимальный радиус вогнутой кривой H w . min , м |
5.2.2 |
А, В |
V e |
500 |
750 |
1000 |
1300 |
2400 |
3800 |
8800 |
|
|
Поперечный профиль |
Минимальный поперечны уклон q min ,% |
7.2.1 |
А, В |
- |
2,5 |
||||||
|
Максимальный поперечный уклон q max , % |
7.2.1 |
А, В |
- |
8,0 |
|||||||
|
Максимальный продольный уклон возвышения кромки Δs max , % |
7.3.2 |
А, В |
V e |
0,5-a |
0,4-a |
0,25-a |
0,225-a |
||||
|
2,0 (a≥4,0 м ) |
1,6 (a ≥ 4,0 м ) |
1,0 ( ≥ 4,0 м ) |
0,9 ( a ≥ > 4,0 m ) |
||||||||
|
Минимальный продольный уклон возвышения кромки Δs min , % |
7.3.3 |
А, В |
V e |
0,1- a |
|||||||
|
Видимость |
Минимальное расстояние видимости для остановки автомобиля при s =0 % s h , min , м |
8.1.1 |
А, В |
V 85 |
50 |
65 |
85 |
110 |
140 |
170 |
250 |
|
Минимальное расстояние видимости для обгона S u min , м |
8.1.2 |
А |
V 85 |
- |
475 |
500 |
525 |
575 |
625 |
- |
|
|
Минимальная доля участков дороги с наличием расстояния видимости для обгона, % |
8.3 |
А |
- |
20 |
|||||||
Примечания:
1. Lmjn действует при односторонних кривых.
2. а - расстояние от оси дороги до кромки проезжей части, м.
ПРИЛОЖЕНИЕ
1
ОПРЕДЕЛЕНИЕ СКОРОСТИ V 85 НА ДВУХПОЛОСНЫХ ДОРОГАХ С ОДНОЙ
ПРОЕЗЖЕЙ ЧАСТЬЮ ДЛЯ ДОРОГ ГРУППЫ А
(к п.
3.2 )
На двухполосных дорогах с одной проезжей частью группы А ожидаемая скорость V85 зависит в большей степени от геометрических характеристик (рис. 32). Скорость V85 может определяться как для взаимосвязанного участка дороги, так и для отдельной кривой.
Случай 1. Типовой случай при новом строительстве
Скорость V85 определяется для обоих направлений движения по участкам в зависимости от извилистости дороги и ширины проезжей части по рис. 33. Извилистость представляется при этом как относимая на длину участка сумма абсолютных углов поворота и рассчитывается по формуле (26). Исследуемый участок следует подразделить на отрезки одинаковой извилистости. Границы этих отрезков можно оценить и представить лучше всего по нанесенной по пикетажу суммарной линии абсолютных углов поворота (см. рис.32).
![]()
 , (26)
, (26)
где KU - извилистость дороги, гон/км;
γi - общий угол поворота кривой, гон;
γ i = τ 1i + α 1i + τ 2i;
τ i - угол поворота переходной кривой, гон;
α i - угол поворота круговой кривой, гон;
L - длина участка дороги, км;
В - ширина проезжей части дороги согласно части «Поперечные профили автомобильных дорог» ( RAS- Q), м.
|
|
|
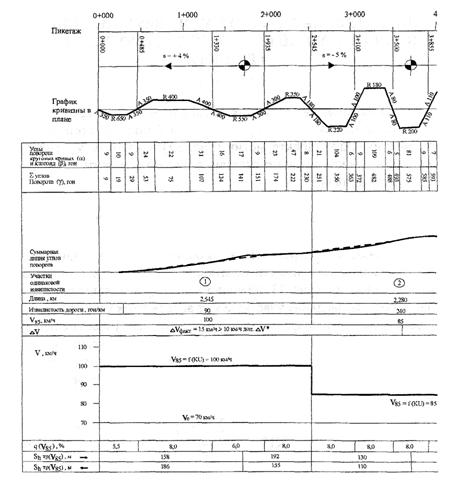
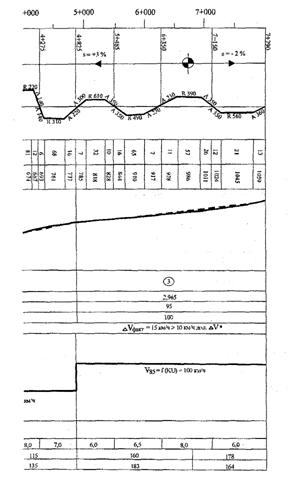
Рис. 32. Пример определения скорости V 85; для двухполосных дорог с одной проезжей частью группы А:
( Ve = 70 км/ч; В = 6,5 м); → - в прямом направлении; ← - в обратном направлении; * - по величине Δ V при смене участка и его распознаваемости в геометрическом характере дороги необходимо решить нужны ли и, если да, то какие переходные мероприятия при необходимости следует предусмотреть по Приложению 2 RAS - L
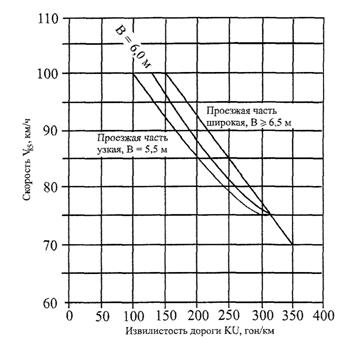
Рис. 33. Зависимость между извилистостью KU , шириной проезжей части В и скоростью V 85 для двухполосных дорог с одной проезжей частью группы А
Случай 2. Типовой случай для коротких участков реконструкции и капитального ремонта
При реконструкции и капитальном ремонте коротких участков скорость V85 может быть оценена также и для отдельных кривых по ширине проезжей части и радиусу кривой согласно рис. 34.
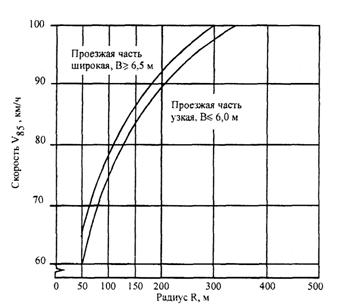
Рис. 34. Зависимость между радиусом кривой R , шириной проезжей части В и скоростью Vss для двухполосных дорог с одной проезжей частью группы А
ПРИЛОЖЕНИЕ
2
СОПУТСТВУЮЩИЕ МЕРОПРИЯТИЯ РЕКОНСТРУКЦИИ СУЩЕСТВУЮЩИХ ДОРОГ ПРИ НЕБЛАГОПРИЯТНОМ
ПРОСТРАНСТВЕННОМ ВИДЕ ПОЛОТНА ДОРОГИ
(к п. 4.2.2)
Если требуемые по рис. 4 ( п. 4.2.2) соотношения радиусов круговых кривых для соотносительного трассирования не могут быть выдержаны при реконструкции существующих дорог, то неустранимые неравномерности в последовательности значений радиусов рекомендуется сгладить посредством придания ориентирования в целях улучшения оптического направления дороги (озеленение, направляющие устройства, увеличение поперечного уклона на кривой), а также расстановкой указателей и знаков. Рекомендации возможных мероприятий показаны на рис 35. При этом следует учитывать, что опасность ДТП повышается к началу диаграммы.
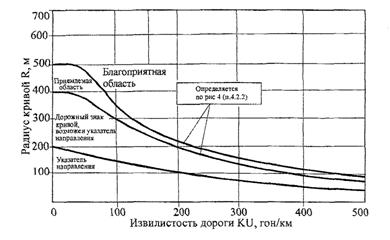
Рис. 35. График целесообразности проведения мероприятий при неустранимом в процессе реконструкции неблагоприятном пространственном виде полотна существующих дорог (извилистость участка дороги перед кривой 300-500 м)
ПРИЛОЖЕНИЕ
3
РАСЧЕТ МИНИМАЛЬНЫХ РАДИУСОВ КРИВЫХ В ПЛАНЕ (к п.п. 4.2.2 ,
7.2.3 )
На основе формулы (27) получены представленные в табл. 14 минимальные радиусы кривых в плане для поперечных уклонов q = 2,5 % и q = 7 %. Получение радиуса кривой для поперечного уклона q = 8 % не допускается. Максимальный поперечный уклон q = 8 % по формуле (15) учитывает при расчете поперечного уклона соответственно увеличенные через применение V85 повышенные скорости движения на кривых
![]() (27)
(27)
где Rmin - минимальный радиус кривой в плане, м;
V - скорость движения, км/ч;
Ve - проектная скорость при Rmin с поперечным уклоном к внутренней стороне кривой, км/ч;
V85 - скорость при Rmin с поперечным уклоном к внешней стороне кривой, км/ч;
g - ускорение свободного падения, м/с2;
fTmax - максимальный коэффициент сцепления в тангенциальном (продольном) направлении (95% от коэффициента сцепления)
![]()
fRmax - максимальный коэффициент сцепления в поперечном направлении
fRmax = 0,925· fTmax;
n - доля использования максимального поперечного сцепления;
q - поперечный уклон (с отрицательным знаком при направлении к внешней стороне кривой).
Таблица 14
Минимальные радиусы кривых в плане (округленные значения по формуле (27))
|
Проектная скорость V e , км/ч |
Минимальный радиус кривой в плане R min , м, при |
|
|
q = 7% n = 0,5 |
q min = 2,5% n = 0,1 |
|
|
50 |
80 |
320 |
|
60 |
120 |
490 |
|
70 |
180 |
700 |
|
80 |
250 |
980 |
|
90 |
340 |
1400 |
|
100 |
450 |
1700 |
|
120 |
720 |
2700 |
ПРИЛОЖЕНИЕ
4
ГЕОМЕТРИЯ КЛОТОИДЫ (к п. 4.3.1 )
Все клотоиды геометрически подобны друг другу. Поэтому в одних и тех же точках кривой имеют место одинаковые углы поворота, одинаковые значения соотношения r/а и R/ A. Эти характерные точки кривой так и называются и однозначно определяются для всех клотоид радиусом r и единичной клотоидой (а = 1) (рис. 36, табл. 15).
Таблица 15
Значения в характерных точках клотоиды
|
Характерные точки |
τ , гон |
τ , рад |
А |
R |
L |
|||
|
1 |
31,83 |
0,50 |
1,00 R |
1,00 L |
1,00 А |
1,00 L |
1,00 А |
1,00 R |
|
1,5 |
14,16 |
0,22 |
0,67 R |
1,50 L |
1,50 А |
2,25 L |
0,67 А |
0,45 R |
|
2 |
7,96 |
0,13 |
0,50 R |
2,00 L |
2,00 А |
4,00 L |
0,50 А |
0,25 R |
|
3 |
3,54 |
0,06 |
0,33 R |
3,00 L |
3,00 А |
9,00 L |
0,33 А |
0,11 R |
|
4 |
1,99 |
0,03 |
0,25 R |
4,00 L |
4,00 А |
16,00 L |
0,25 А |
0,06 R |
|
5 |
1,27 |
0,02 |
0,20 R |
5,00 L |
5,00 А |
25,00 L |
0,20 А |
0,04 R |
|
6 |
0,89 |
0,01 |
0,17 R |
6,00 L |
6,00 А |
36,00 L |
0,17 А |
0,03 R |
|
∞ |
0,00 |
0,00 |
0,00 |
0,00 |
∞ |
∞ |
0,00 |
0,00 |
|
R А |
100 r 2 π |
1 2 r 2 |
R r |
r · L |
r ·А |
r 2 · L |
А r |
R r 2 |
Примечание : τ - угол наклона касательной в данной точке.
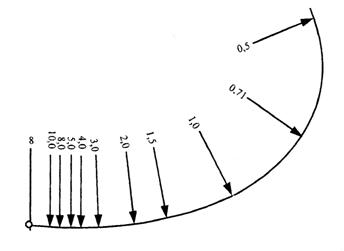
Рис. 36. Характерные точки клотоиды
Геометрия клотоиды показана на рис 37.
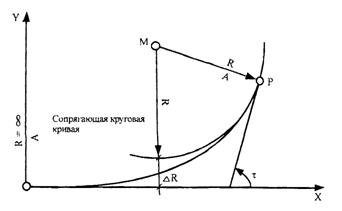
Рис. 37. Геометрия клотоиды
Основные геометрические соотношения клотоиды:
A 2 = R·L; (28)
![]() (29)
(29)
![]() (30)
(30)
 (31)
(31)
 (32)
(32)
Представление X, Y, Δ R, X M в виде рядов:
 (33)
(33)
 (34)
(34)
 (35)
(35)
 (36)
(36)
Число членов ряда
достаточно для получения точности в миллиметрах до А =
Здесь R - радиус круговой кривой в точке Р сопряжения с клотоидой, м;
А - параметр клотоиды, м;
L - длина клотоиды от ее начала до точки Р, м;
τ - угол между тангенсами в начальной точке и в точке Р, гон;
X, Y - прямоугольные координаты точки Р, м;
X M - абсцисса центра круговой кривой, м;
ΔR - смещение круговой кривой от начального тангенса, м.
Для предварительных расчетов получения координат X, Y и смещения Δ R вполне достаточно использовать выраженные через L и R приближенные формулы
X ≈ L; (37)
![]() (38)
(38)
![]() (39)
(39)
ПРИЛОЖЕНИЕ
5
УЧАСТКИ ИЗМЕНЕНИЯ (ОТГОНА) ПОПЕРЕЧНОГО УКЛОНА НА ПЕРЕХОДНОЙ КРИВОЙ (к п.п.
7.3.2 , 7.3.3 )
Примеры изменения (отгона) поперечного уклона на переходной кривой даны на рис. 38, 39, 40.
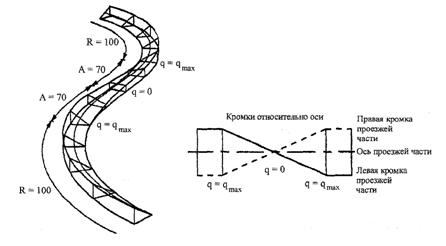
Рис 38. Пример короткого участка изменения поперечного уклона
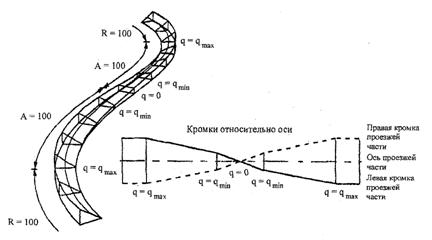
Рис. 39 . Пример длинного участка изменения поперечного уклона
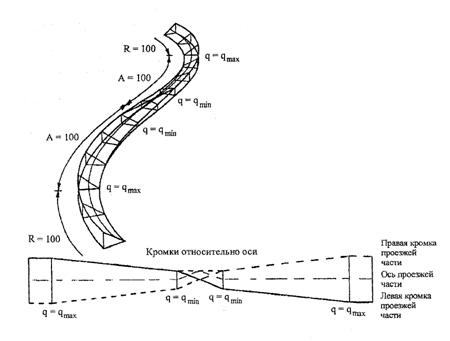
Рис. 40 . Пример длинного участка отгона с косым изменением поперечного уклона
Вид на участок с косым изменением поперечного уклона представлен на рис. 41.
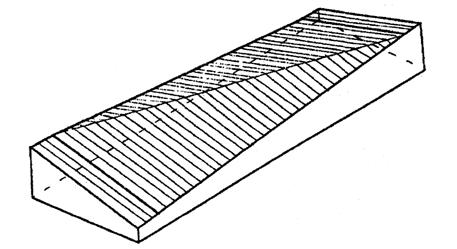
Рис. 41. Вид на участок с косым изменением поперечного уклона (с увеличением по высоте)
Расчет минимальной длины клотоиды из условия возвышения кромки и отгона поперечного уклона
Необходимая длина клотоиды для возвышения кромки и отгона поперечного уклона в большинстве случаев является достаточной, так как условия согласно п. 4.3.2 действуют в широких пределах. Если, например, при больших радиусах кривых в плане должны быть применены небольшие клотоиды, то необходимый минимальный параметр клотоиды должен быть получен из условия возвышения кромки и отгона поперечного уклона по следующим формулам:
клотоида
 (40)
(40)
Отрезок клотоиды
![]()
 (41)
(41)
где Amin - минимальный параметр клотоиды, м;
а - расстояние кромки проезжей части от оси вращения, м;
qe - поперечный уклон в конце клотоиды, %;
qa- поперечный уклон в начале клотоиды, %;
q2 - поперечный уклон в конце отрезка клотоиды, %;
q1 - поперечный уклон в начале отрезка клотоиды ( qa, q 1 с отрицательным знаком при их направлении, противоположном уклонам qe, q2), %;
Δsmax - максимальное нарастание продольного уклона, %;
R - радиус в конце переходной кривой, м;
R 2 - радиус в конце отрезка клотоиды, м;
R 1 - радиус в начале отрезка клотоиды, м.
ПРИЛОЖЕНИЕ
6
РАСЧЕТ ВЫПУКЛЫХ И ВОГНУТЫХ ВЕРТИКАЛЬНЫХ КРИВЫХ (к п. 5.2.1 )
Расчет параметров выпуклых и вогнутых вертикальных кривых осуществляется по следующим формулам:
![]() (42)
(42)
![]() (43)
(43)
![]() (44)
(44)
![]() (45)
(45)
![]() (46)
(46)
где Н - радиус закругления (радиус кривизны в вершине параболы), м;
Т - длина тангенса, м;
s1, s2 - продольный уклон тангенсов, %;
s( x) - продольный уклон проектной линии в любой точке кривой, %;
у(х) - ордината в любой точке, м;
xs - абсцисса вершины кривой, м;
f - расстояние от точки пересечения тангенсов до кривой, м;
М - середина закругления;
S - вершина кривой;
TS - точка пересечения тангенсов.
Правило знаков:
Подъем положительные знаки (+ s1, + s2);
Спуск отрицательные знаки (- s 1, - s2);
Радиус вогнутой кривой ( Hw) положительный знак (+Н);
Радиус выпуклой кривой (Н k) отрицательный знак (-Н).
Условные обозначения параметров формул (42), (43), (44), (45), (46) приведены на рис. 42.
Рис. 42. Пример выпуклой вертикальной кривой в виде параболической кривой
ПРИЛОЖЕНИЕ
7
ВЗАИМОСВЯЗЬ МЕЖДУ МИНИМАЛЬНЫМ РАДИУСОМ ВЫПУКЛОЙ КРИВОЙ И РАССТОЯНИЕМ ВИДИМОСТИ
ДЛЯ ОСТАНОВКИ АВТОМОБИЛЯ (к п. 5.2.2 )
Минимальные радиусы выпуклой кривой в табл. 7 ( п. 5.2.2) получены на основании опытных данных. Между минимальным радиусом выпуклой кривой Hk. min, расстоянием видимости для остановки Sh, высотой глаз водителя h A и высотой видимого препятствия h z имеется взаимосвязь согласно геометрической расчетной модели (рис. 43)
 (47)
(47)
где Н k . min - минимальный радиус выпуклой кривой, м;
S h - необходимое расстояние видимости для остановки (см.рис. 31), м;
hA - высота глаз водителя, м;
h z - высота видимого препятствия, м.
Рис. 43. Расстояние видимости для остановки и встречного автомобиля для обгона на выпуклых кривых
Высота точек на проезжей части по направлению взгляда водителя в табл. 17 (Приложение 10 RAS- L) была определена по табл. 7 ( п. 5.2.2), а также по расстоянию видимости для остановки по рис. 31 (п. 8.1.1), исходя из следующих принятых граничных условий:
• V85
= Ve +
• общий путь до остановки находится в пределах выпуклой кривой со средним продольным уклоном s сред = ± 0% (половина пути находится перед выпуклой кривой, вторая половина - за ней).
В расчет радиуса выпуклой кривой при половине и полном расстоянии видимости для полной остановки автомобиля вошли высота глаз водителя hA по табл. 17 и расстояние видимости встречного автомобиля для обгона по табл. 12 (п. 8.1.2).
Соотношение между расстояниями видимости встречного автомобиля для обгона и расчетными скоростями получается также по выше приведенным, жестко установленным граничным условиям.
ПРИЛОЖЕНИЕ
8
КРИВАЯ СХОДА (ОСОБЫЙ ВИД ВЫПУКЛЫХ И ВОГНУТЫХ ВЕРТИКАЛЬНЫХ КРИВЫХ)
(к п. 5.2.2)
Кривая схода облегчает распознание положения характера дороги на участке выпуклой кривой, так как определяемая радиусом в плане и радиусом в продольном профиле пространственная кривая лежит на наклонной плоскости (рис. 44). Благодаря такому пространственному представлению положения трассы, расстояния видимости, установленные в двухмерном измерении по Приложению 7 RAS- L, увеличиваются.
Рис. 44. Кривая схода
ПРИЛОЖЕНИЕ
9
ИЗМЕНЕНИЕ УШИРЕНИЯ КРОМОК ПРОЕЗЖИХ ЧАСТЕЙ
(к п.п. 7.4, 7.5)
Отгон уширения кромок проезжих частей является необходимым:
• при устройстве дополнительных переходно-скоростных полос на пересечениях и примыканиях (расширение проезжей части);
• при устройстве уширения проезжей части на кривых;
• для размещения ведомых кривых (т.е. кривых, описываемых задними колесами автомобилей с внутренней стороны кривых в стесненных условиях) при устройстве серпантинов.
Определение длины участка уширения при расширениях и уширениях проезжей части на круговых кривых производится по формуле
![]() , (48)
, (48)
где Lz - длина отгона уширения, м;
D - расстояние между осями плюс выступ спереди, м;
А - параметр клотоиды, м;
L - длина клотоиды, м;
R - радиус круговой кривой, м.
Изменение уширения проезжей части при последовательности элементов прямая - клотоида - круговая кривая и наоборот показано на рис. 45.
Рис. 45. Последовательность элементов прямая - клотоида - круговая кривая (п. 7.4)
При заданной длине отгона уширения возможны две схемы отгона при расширении проезжей части на ширину одной полосы и более.
А). Расширение проезжей части в пределах его изменения посредством двух квадратных парабол представлено на рис. 46.
Рис. 46. Изменение положения кромок при расширении проезжей части (п. 7.4)
Определение уширения в каждой точке его отгона выполняется в этом случае по формулам (49), (50):
![]() (49)
(49)
![]() (50)
(50)
где i - уширение проезжей части, м;
Lz - длина отгона уширения, м;
i n - величина уширения проезжей части в любой точке, м;
L n - длина до точки от начала уширения, м.
Для облегчения выполнения расчетов приводится табл. 16.
Таблица 16
Единичные уширения для расширения проезжей части
|
|
e n |
Δ e n |
|
e n |
Δ e n |
|
|
0,00 |
0,000 |
|
0,50 |
0,500 |
|
|
|
0,005 |
0,095 |
|||||
|
0,05 |
0,005 |
0,55 |
0,595 |
|||
|
0,015 |
0,085 |
|||||
|
0,10 |
0,020 |
0,60 |
0,680 |
|||
|
0,025 |
0,075 |
|||||
|
0,15 |
0,045 |
0,65 |
0,755 |
|||
|
0,035 |
0,065 |
|||||
|
0,20 |
0,080 |
0,70 |
0,820 |
|||
|
0,045 |
0,055 |
|||||
|
0,25 |
0,125 |
0,75 |
0,875 |
|||
|
0,055 |
0,045 |
|||||
|
0,30 |
0,180 |
0,80 |
0,920 |
|||
|
0,065 |
0,035 |
|||||
|
0,35 |
0,245 |
0,85 |
0,955 |
|||
|
0,075 |
0,025 |
|||||
|
0,40 |
0,320 |
0,90 |
0,980 |
|||
|
0,085 |
0,015 |
|||||
|
0,45 |
0,405 |
0,95 |
0,995 |
|||
|
0,095 |
0,05 |
|||||
|
0,50 |
0,500 |
1,000 |
1,000 |
|||
|
|
|
|
||||
|
|
||||||
Б). Расширение проезжей части в пределах его изменения посредством двух квадратных парабол и промежуточной прямолинейной вставки между ними иллюстрирует рис. 47.
Определение уширения в каждой точке на каждом из трех участков его отгона выполняется в этом случае по формулам (51), (52), (53):
![]() (51)
(51)
![]() (52)
(52)
![]() (53)
(53)
где L - длина переходной кривой, м;
L z - длина отгона уширения, равная L +
Рис. 47. Изменение положения кромок приуширении проезжей части (п. 7.5):
1 - первая параболическая кривая;2 – прямолинейный участок, 3 - вторая параболическая кривая
На участках изменения направления кривизны дороги в плане уширение выполняется на длине каждой из переходных кривых (клотоид), как показано на рис. 48.
Если
длина круговой кривой меньше
Рис. 48 . Уширение проезжей части на обратных клотоидах (уширение по рис. 47)
При соотношении L/ i > 20 отгон уширения выполняется по линейному закону
![]() (54)
(54)
где L z -длина переходной кривой (равна длине отгона уширения), м;
in - величина уширения проезжей части в любой точке, м.
На участках изменения односторонней кривизны (при переходе от одного радиуса кривой к другому на участке промежуточной овальной клотоиды) уширение выполняется как показано на рис. 49, а расчет осуществляется по формуле
![]() (55)
(55)
где i 1 - уширение проезжей части в начале овальной клотоиды, м;
i2 - уширение проезжей части в конце овальной клотоиды, м;
L - длина овальной клотоиды (равна длине отгона уширения), м.
Рис. 49. Уширение проезжей части на овальной клотоиде
ПРИЛОЖЕНИЕ
10
ОПРЕДЕЛЕНИЕ РАССТОЯНИЯ ВИДИМОСТИ (к разделу 8 )
Определение необходимого расстояния видимости для остановки автомобиля
Расстояние видимости при остановке автомобиля определяется по следующим формулам:
S h = S 1 + S 2; (56)
![]() (57)
(57)
 (58)
(58)
где Sh - расстояние видимости для остановки, м;
S 1 - путь, пройденный автомобилем за время реакции водителя и приведение в действие тормозной системы, м;
S2 - тормозной путь, м;
V - скорость движения, км/ч;
V0 - скорость движения в начале торможения, км/ч;
t R - время реакции водителя и действия тормозов, с ( t g = 2 с);
g - ускорение свободного падения, м/с2;
fT - коэффициент сцепления в поперечном направлении
![]()
Модель определения расстояния видимости для обгона
Необходимое расстояние видимости для обгона слагается из пути совершения обгона и пути встречного автомобиля в течение времени маневра обгона, расстояния безопасности между этими двумя автомобилями в конце обгона (рис. 50). Поэтому расстояние видимости для обгона зависит от скорости V85,
Рис. 50. Модель для определения расстояния видимости встречного автомобиля при обгоне:
V 1, Vlm - соответственно скорость обгоняющего автомобиля в начале и в процессе обгона;
V 2 - скорость
обгоняемого автомобиля; V 3
- скорость встречного автомобиля; ![]() - положение автомобиля в начале маневра
обгона;
- положение автомобиля в начале маневра
обгона; ![]() - то оке, в конце маневра
обгона
- то оке, в конце маневра
обгона
Определение фактического расстояния видимости (к п. 8.2)
Способность глаз человека к восприятию является ограниченной. Препятствия на проезжей части должны иметь минимальные размеры, позволяющие их увидеть и распознать с расстояния до остановки автомобиля. Эти минимальные размеры зависят от остроты зрения человека, оптических свойств препятствия и проезжей части, а также от освещенности и от погодных условий. Большие препятствия для их переезда могут быть, тем не менее, слишком малыми, чтобы при движении с расчетной скоростью своевременно быть обнаруженными. Поэтому для расчета расстояния видимости для остановки автомобиля не представляется возможным установить препятствие с определенными размерами и оптическими свойствами. Так что и далее остается исходить из геометрически оправданной, однако в психологическом и физиологическом отношениях неудовлетворительной, модели определения расстояния видимости. Даже если в проекте в каждом месте требуемые расстояния видимости соблюдены, не в каждом случае гарантируется распознание малых препятствий.
Для определения фактического расстояния видимости действуют следующие правила,
1, Определение фактического расстояния видимости должно производиться с учетом пространственного положения дороги. Следует учитывать все предметы оборудования дороги, а также существующее и предусматриваемое озеленение.
2, Определение фактического расстояния видимости необходимо выполнить для каждого из расстояний видимости и раздельно для каждого из двух направлений движения.
3, В основе определения фактических расстояний видимости должны быть входные значения величин табл. 17. Они дополнительно представлены в Приложении 7 RAS- L с пояснениями.
Положения глаз водителя и препятствия раздельно для расстояний видимости до полной остановки и для обгона представлены на рис. 51.
Рис. 51. Положение глаз водителя и препятствия при определении расстояний видимости для остановки
автомобиля
(а) и при обгоне (б):
ZP 1 , ZP 2 , ZP 3 - возможное положение точек препятствий на внешней
полосе движения; ZP 4 , ZP 5 - то же, на внутренней полосе движения
При предварительном определении расстояний видимости для дорог с одной и двумя проезжими частями можно использовать в качестве направляющей линии ось проезжей части. В критических случаях при двух проезжих частях для разных направлений следует определить фактическое расстояние видимости для остановки автомобиля именно для критической полосы движения.
Если расстояние видимости для остановки автомобиля не может быть обеспечено, необходимо предусмотреть ограничение скорости для условий мокрого покрытия. Расстояния видимости до остановки автомобиля для сухого покрытия могут быть определены также по формулам (56), (57), (58) с использованием в расчетах коэффициента сцепления в продольном направлении f =0,8.
Таблица 17
Входные данные для определения фактических расстояний видимости
|
Расстояние видимости для |
Положение глаз водителя |
Положение препятствия |
|||
|
Местоположение |
Высота hA , м |
Местоположение |
V 85 , км/ч |
Высота h z , м |
|
|
Остановки |
По оси своей полосы движения |
1,0 |
По оси своей полосы движения |
60 |
0,00 |
|
70 |
0,05 |
||||
|
80 |
0,15 |
||||
|
90 |
0,25 |
||||
|
100 |
0,35 |
||||
|
110 |
0,40 |
||||
|
170 |
0,45 |
||||
|
130 |
0,45 |
||||
|
Обгона |
По оси своей полосы движения |
1,0 |
По оси встречной полосы движения |
1,0 |
|
Анализ расстояний видимости на основе диаграммы приведен на рис. 52.
Рис. 52. Пример для анализа расстояний видимости на основе диаграммы видимости
Обеспечение необходимого расстояния видимости для остановки автомобиля на левосторонних кривых у дорог с двумя проезжими частями
Соблюдение минимальных радиусов при трассировании дороги не гарантирует наличия постоянно необходимого расстояния видимости на левых полосах движения при раздельных проезжих частях. Кустарники, изгороди для предотвращения ослепления или шумозащитные стенки уменьшают видимость при небольших радиусах кривых. Представляют ли собой защитные ограждения на центральной разделительной полосе помехи видимости, следует проверять в каждом отдельном случае в зависимости от пространственного положения дороги. При совмещении левосторонней кривой малого радиуса с выпуклой кривой в продольном профиле барьерное ограждение на центральной разделительной полосе представляет собой, например, помеху видимости, которая ограничивает распознание появления возможных препятствий на левой полосе движения. Мелкие препятствия не могут обуславливать большие опасности, поскольку мимо них можно легко проехать. И все же в любом случае необходимо обеспечить возможность своевременного распознания впереди стоящего автомобиля (например, при образовании затора).
Основными факторами для уменьшения расстояния видимости являются величина радиуса кривой и расстояние до помехи видимости из положения глаз водителя. На это расстояние оказывают влияние конструктивное решение поперечного профиля (ширина левой полосы движения, ширина внутренней прилегающей к ней укрепительной полосы и ширина половины центральной разделительной полосы за вычетом ширины помехи видимости) и положение автомобиля на проезжей части.
Взаимосвязи между необходимыми расстояниями видимости для остановки автомобиля при различных скоростях движения и фактическим расстоянием видимости показаны на рис. 53. При этом учтены радиусы кривых и расстояния между внутренней кромкой левой полосы движения и помехой для видимости на центральной разделительной полосе.
Графики на рис 53 построены на основе положений, показанных на рис. 54:
• автомобиль движется по
левой полосе движения, положение глаз водителя (В) независимо от ширины полосы
движения находится при этом на расстоянии b =
• возможная помеха (С) для видимости находится на левой
полосе движения также на расстоянии b =
На правой половине диаграммы рис. 53 нанесены необходимые для мокрого покрытия расстояния видимости до остановки автомобиля для различных скоростей движения и разных продольных уклонов. Благодаря использованию необходимого расстояния видимости для остановки автомобиля, можно установить по левой половине диаграммы в зависимости от выбранного радиуса, на каком расстоянии (включая боковую укрепительную полосу) должна быть помеха видимости от левой кромки полосы движения, чтобы гарантировать возможность остановки.
Рис. 53. Требуемые расстояния видимости и необходимые расстояния между левой кромкой внутренней полосы раздельной проезжей части и помехой видимости на центральной разделительной полосе:
![]() -s = -4%;
-s = -4%; ![]() -s = -2%;
-s = -2%; ![]() S-s = 0%;
S-s = 0%; ![]() -s = 2%;
-s = 2%; ![]() - s = 4%;
- s = 4%; ![]() -s = 0%
-s = 0%
На
представленном примере для дороги категории В I и скорости V85
=100 км/ч необходимое расстояние видимости для остановки автомобиля составляет
Рис 54 . Геометрическая модель для определения расстояний видимости на раздельных проезжих частях на левосторонних кривых (кривых с левым углом поворота):
В - положение глаз
водителя; С – предполагаемое препятствие на проезжей части; R -радиус круговой кривой; b -расстояние от положения глаз водителя или от
предполагаемого препятствия до левой кромки левой полосы движения ( b =
Таблица 18
Фактическое расстояние «а» между полосой движения и помехой видимости на центральной разделительной полосе для типовых поперечных профилей
|
Элементы, определяющие фактическое расстояние до помехи видимости препятствия на разделительной полосе |
Типы поперечных профилей согласно части «Поперечные профили автомобильных дорога ( RAS - Q ) |
||||
|
RQ 20 |
RQ 26 |
RQ 29,5 |
RQ 33 |
RQ 35,5 |
|
|
Половина ширины центральной разделительной полосы, м |
1,00 |
1,50 |
1,75 |
1,50 |
1,75 |
|
Половина ширины помехи
видимости, например, двойного защитного ограждения шириной |
-0,40 |
-0,40 |
-0,40 |
-0,40 |
-0,40 |
|
Ширина внутренней укрепительной полосы, м |
+0,50 |
+0,50 |
+0,75 |
+0,50 |
+0,75 |
|
Расстояние «а» между кромкой полосы движения и помехой видимости препятствия, м |
1,10 |
1,60 |
2,10 |
1,60 |
2,10 |